
Panoramica di Sub/Call Sub
OPZIONALE NORMALE 5 MIN
Sub è un'abbreviazione di Subroutine. Una subroutine si riferisce a un processo che riduce al minimo il numero di passaggi in un programma chiamando le parti necessarie quando sono presenti due o più parti duplicate.
- I robot Doosan Robotics forniscono un comando CallSub per chiamare i comandi Sub e il paragrafo secondario corrispondente.
- Il comando Sub funziona come definito in Python.
Nota
- Il paragrafo secondario deve essere aggiunto in MainSub, l'inizio di un paragrafo principale, e EndMainSub, la fine di un paragrafo principale.
- Oltre alla ripetizione, il comando Sub viene utilizzato anche per semplificare un paragrafo principale. L'utilizzo di un comando secondario consente di identificare in modo intuitivo l'attività di un paragrafo principale che viene eseguita al momento.
- L'utilizzo di un comando secondario consente il test dell'unità di paragrafo secondario.
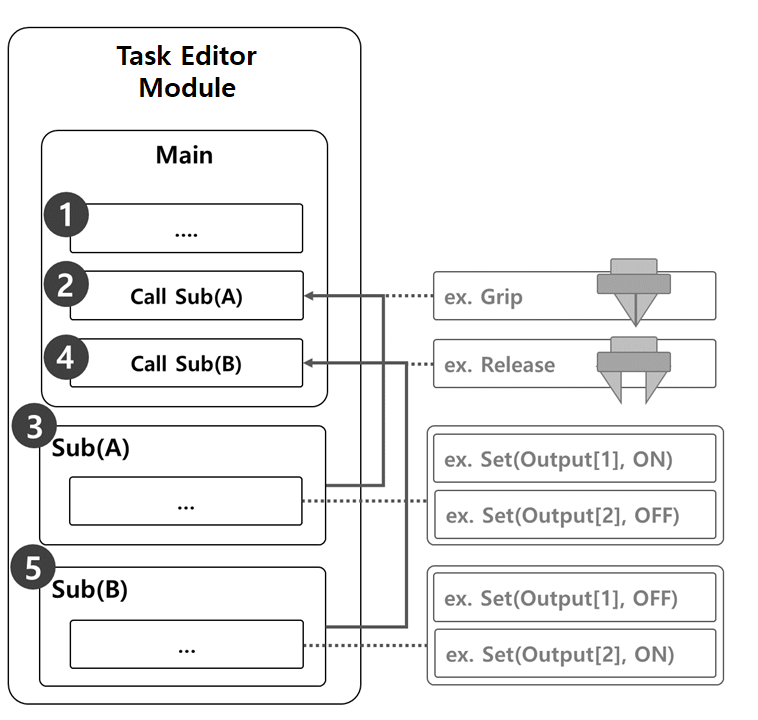
Il campione in cui viene utilizzato un comando secondario per eseguire i movimenti di presa e rilascio di una pinza robotizzata è costituito da quanto segue.
- Le righe del paragrafo principale eseguono il programma di attività in ordine sequenziale a partire dalla prima riga.
- Passa a Sub(A) chiamato da Sub chiamata.
- Campione
- Programma: Chiamare la subroutine Grip.
- Robot: Nessuna mozione.
- Campione
- Sub(A) eseguito. Tutte le righe del paragrafo secondario vengono eseguite in ordine sequenziale, ritorna al paragrafo principale ed esegue la riga successiva.
- Campione
- Programma: Eseguire le righe della subroutine Grip in ordine sequenziale. Utilizzare il comando set per impostare Output [1] come ON e Output [2] come OFF.
- Robot: La pinza del robot esegue il movimento Grip.
- Campione
- Sposta su Sub(B) chiamato da Sub chiamata.
- Campione
- Programma: Chiamare la subroutine rilascio.
- Robot: Nessuna mozione.
- Campione
- Sub(B) eseguito. Tutte le righe del paragrafo secondario vengono eseguite in ordine sequenziale, ritorna al paragrafo principale ed esegue la riga successiva.
- Campione
- Programma: Eseguire le righe della subroutine Grip in ordine sequenziale. Utilizzare il comando set per impostare Output [1] su OFF e Output [2] su ON.
- Robot: La pinza del robot esegue il movimento di rilascio.
- Campione
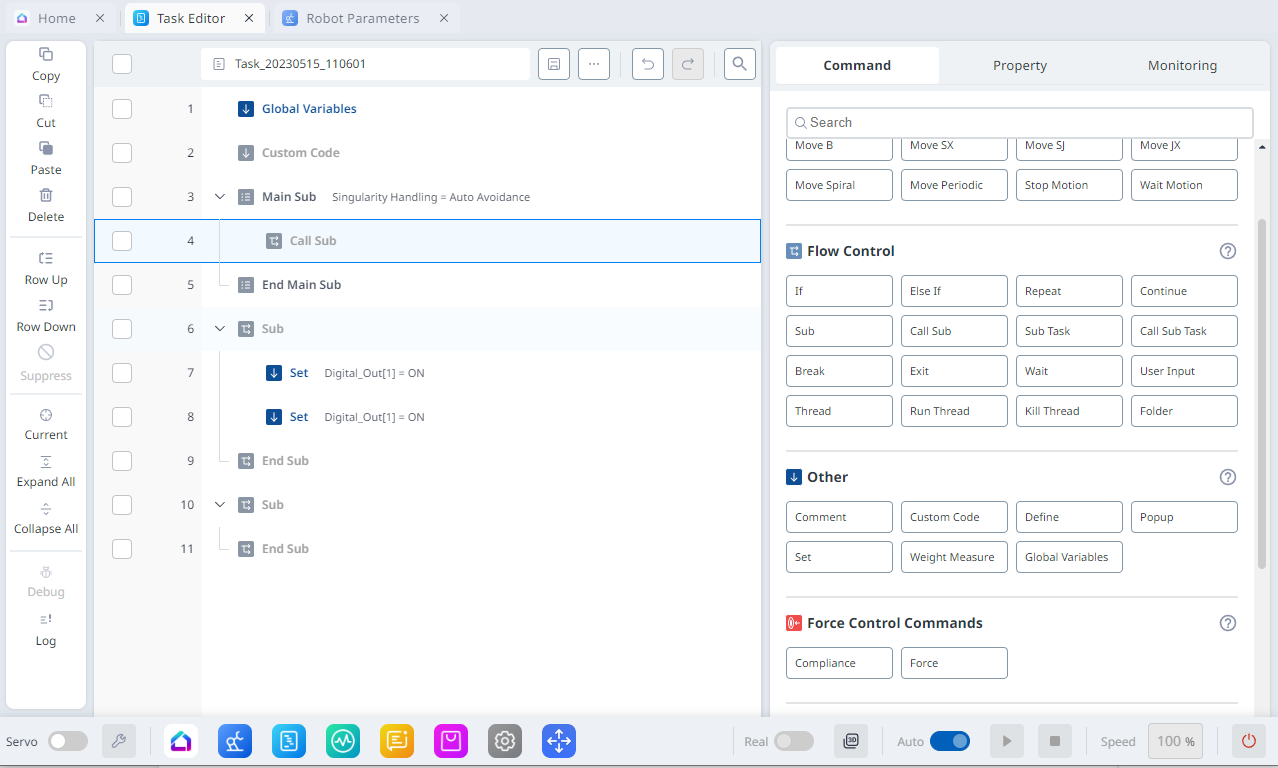
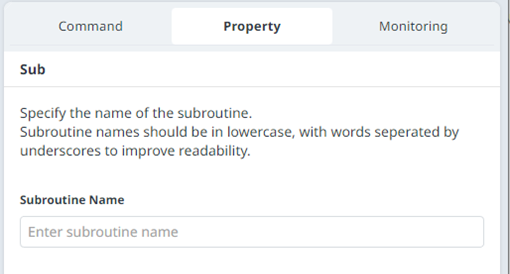
Aggiungi comando secondario
- Nel modulo Editor operazioni, nella sezione controllo flusso del menu comando di destra, aggiungere un comando secondario.
- Immettere il nome della subroutine.
Aggiungi comando CallSub
- Nel modulo Editor operazioni, nella sezione controllo flusso del menu comando di destra, aggiungere un comando secondario chiamata.
- Selezionare il nome della subroutine registrata con il comando secondario.
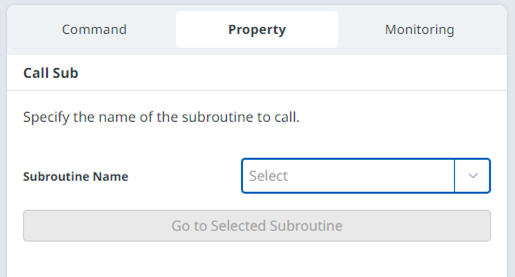
Nota
- Se il numero di righe aumenta nel programma di attività, potrebbe risultare difficile trovare subroutine. In tal caso, toccare il pulsante Vai alla subroutine selezionata nella proprietà del comando CallSub per spostare il centro sulla riga di comando secondaria corrispondente.