
Panoramica della singolarità
La singolarità in un robot multi-giunto si riferisce a una posizione (o punto) in cui il robot ha difficoltà a calcolare la sua posa successiva durante il movimento. I robot multi-giunto calcolano ogni angolo del giunto durante il movimento in base all'estremità del robot
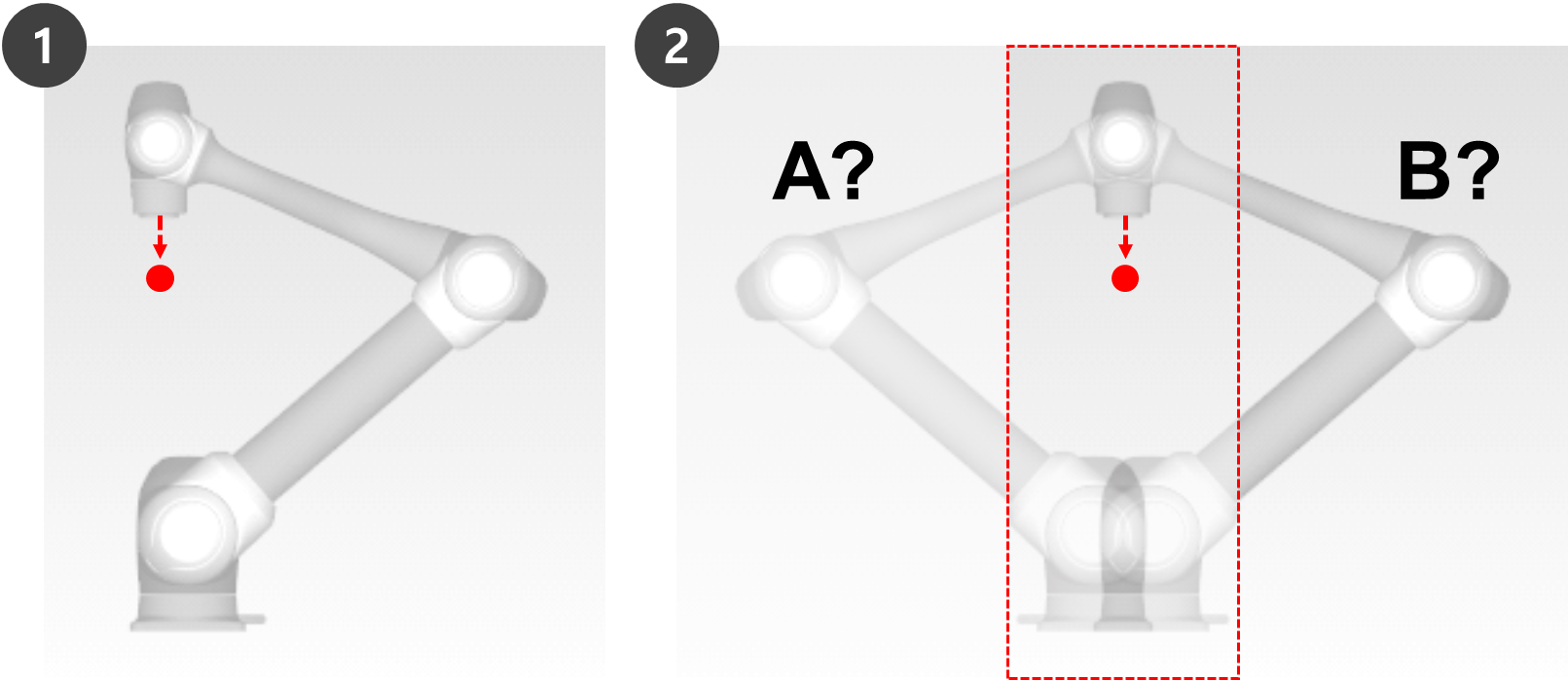
Ad esempio, nella Fig. 1 di seguito, quando il robot si sposta verso il punto rosso, non sarà in grado di determinare se spostare le articolazioni per impostare la posa A o la posa B come mostrato nella Fig. 2. Questa posizione (o punto) è chiamata singolarità.
Vicino a una singolarità, il movimento del robot non è fluido in termini di piano, punto e linea, il movimento lineare finale del robot potrebbe non essere mantenuto e l'errore di posizione durante il controllo potrebbe aumentare. La singolarità si verifica in tre casi, come mostrato nella figura seguente, anche quando i giunti del robot formano una linea.
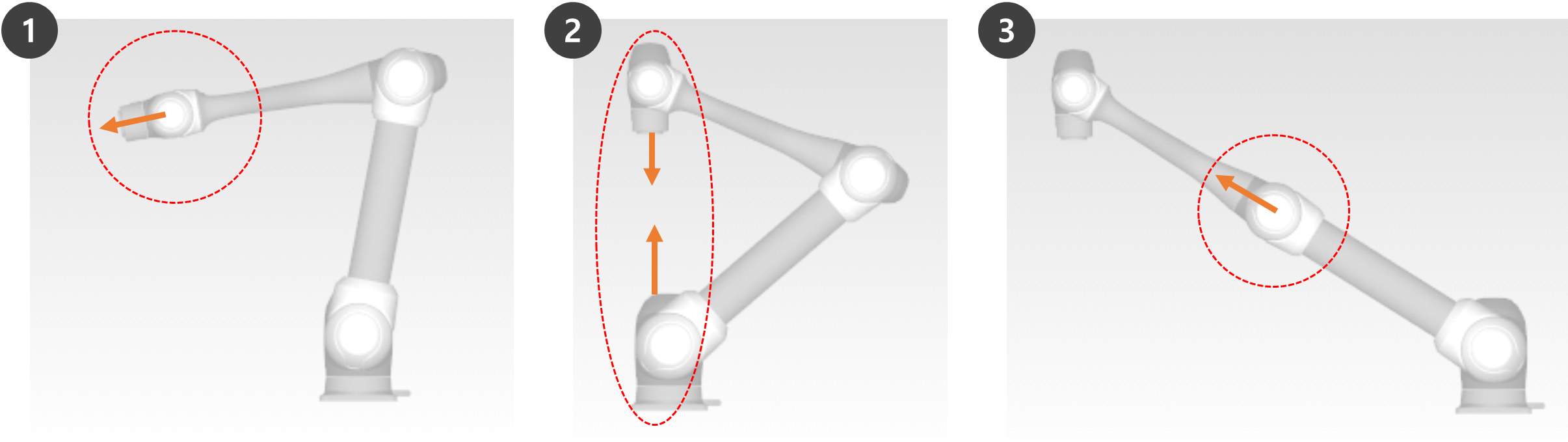
Singolarità polso: Quando il polso del robot forma una linea quando l'asse 5 si avvicina a 0°
- Rispetto a un braccio umano, gli assi 4, 5 e 6 corrispondono all'articolazione del polso.
- Singolarità spalla: Quando gli assi 1 e 6 sono sulla stessa linea
- Rispetto a un braccio umano, gli assi 1 e 2 corrispondono all'articolazione della spalla.
- Singolarità gomito: Quando il robot forma una linea quando l'asse 3 si avvicina a 0°
- Se confrontato con un braccio umano, l'asse 3 corrisponde al gomito.
Attenzione
Le operazioni manuali e automatiche che si spostano con rotazione articolare non sono influenzate dalla singolarità.
- Movimento attività, comando MoveL, ecc.
- La singolarità si verifica solo durante il funzionamento manuale e automatico dove il robot termina di eseguire il movimento lineare.
- Movimento articolare, comandi MoveJ, ecc.
- Nella zona di singolarità, il controllo della forza o il controllo della conformità non sono disponibili.
- Poiché la velocità di rotazione di determinati assi aumenta rapidamente quando un movimento lineare supera una singolarità, è possibile che si verifichi una violazione del limite di velocità giunto o del limite di angolo giunto.
Come evitare la singolarità
I robot Doosan Robotics offrono opzioni per evitare singolarità durante il controllo del movimento. Tuttavia, si consiglia di configurare un'attività che non crei eccezioni utilizzando comandi di movimento congiunto come MoveJ nelle zone di singolarità.