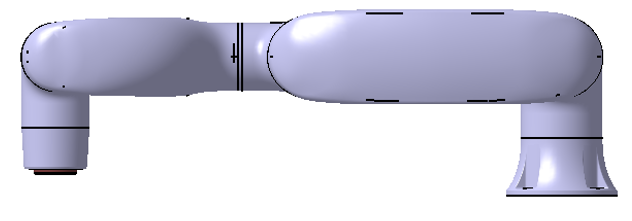
La misurazione del Giunto 1 viene effettuata con l'asse di rotazione perpendicolare al terreno durante il movimento orizzontale.
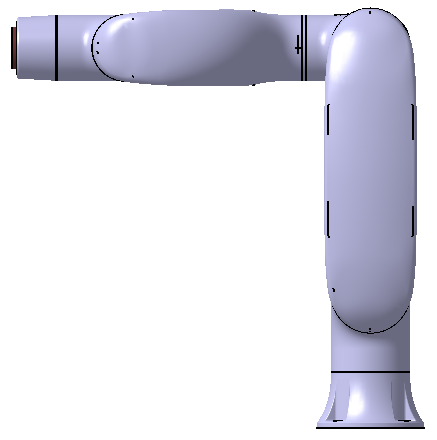
Le misurazioni del Giunto 2 e del Giunto 3 vengono effettuate con l'asse di rotazione parallelo al terreno e quando il robot viene arrestato durante un movimento verso il basso verticale rispetto al terreno.
Nota
Le misurazioni sono il risultato del caso peggiore. La misura può variare a secondo delle circostanze
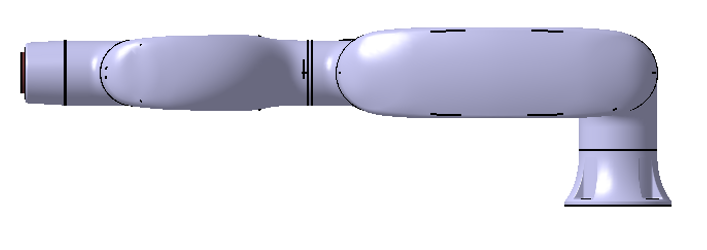
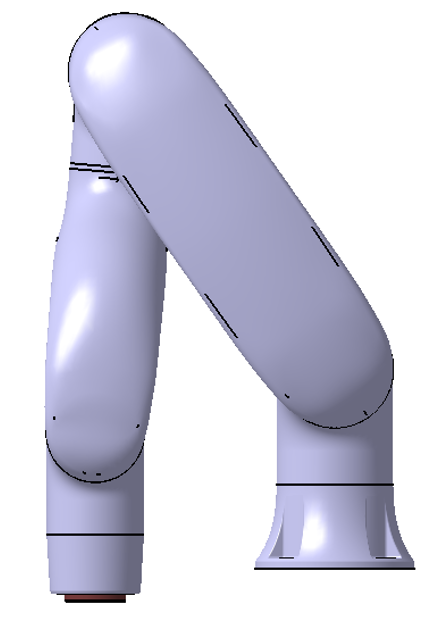
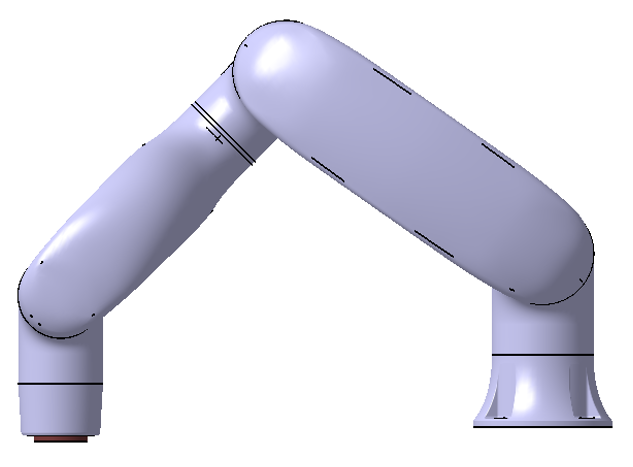
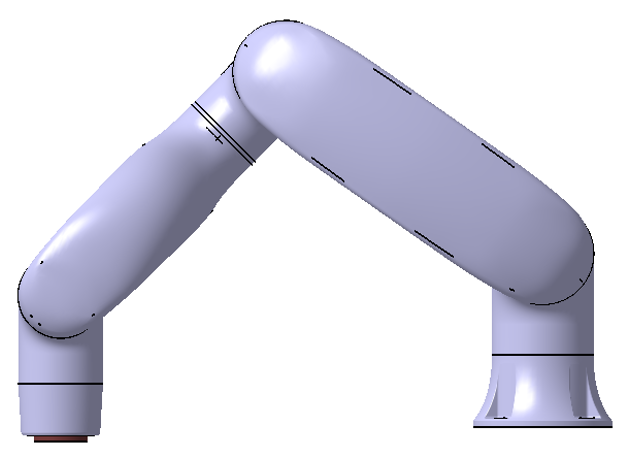
The pose for 33%, 66%, and 100% of extension
Joint 1
Joint 2
Joint 3
100% extension
Stop category 0
33% extension
Stop category 1
-
66% extension
Stop category 1
-
100% extension
Stop category 1
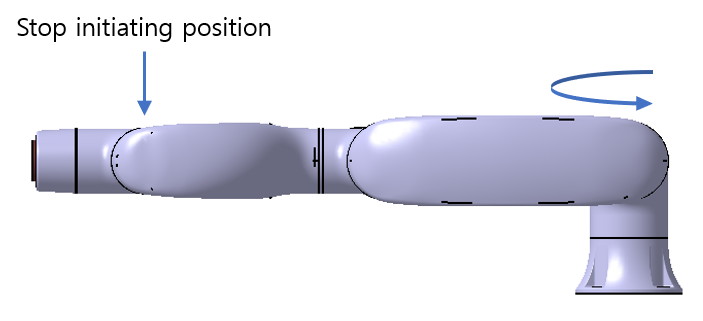
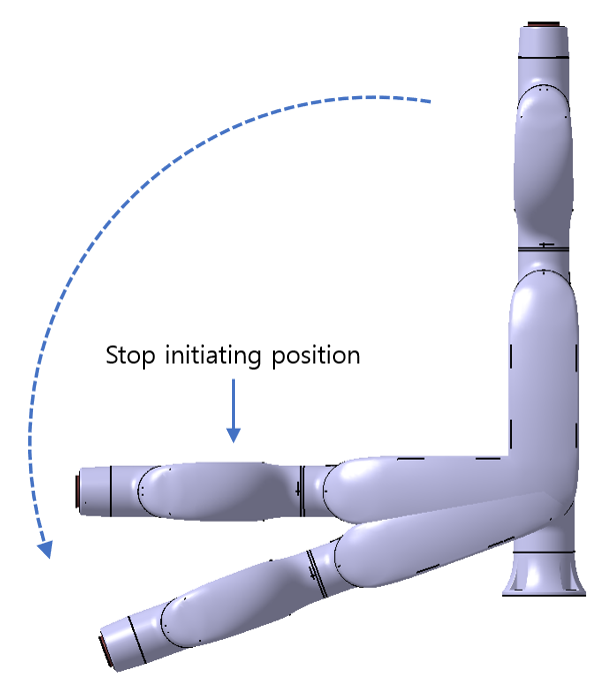
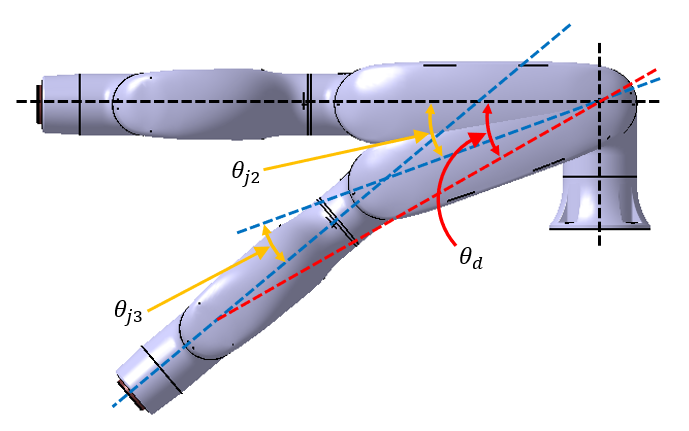
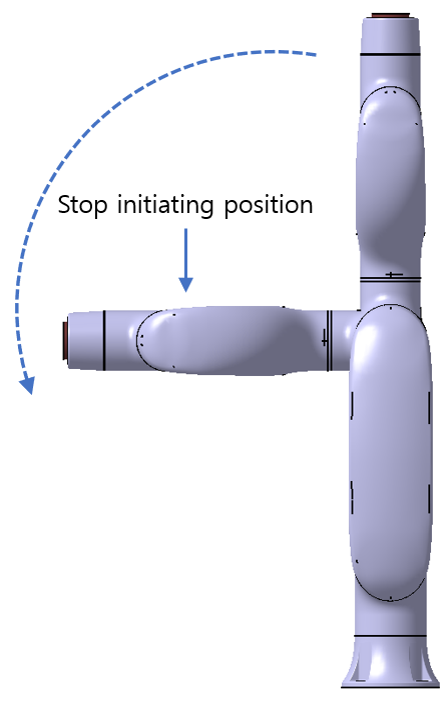
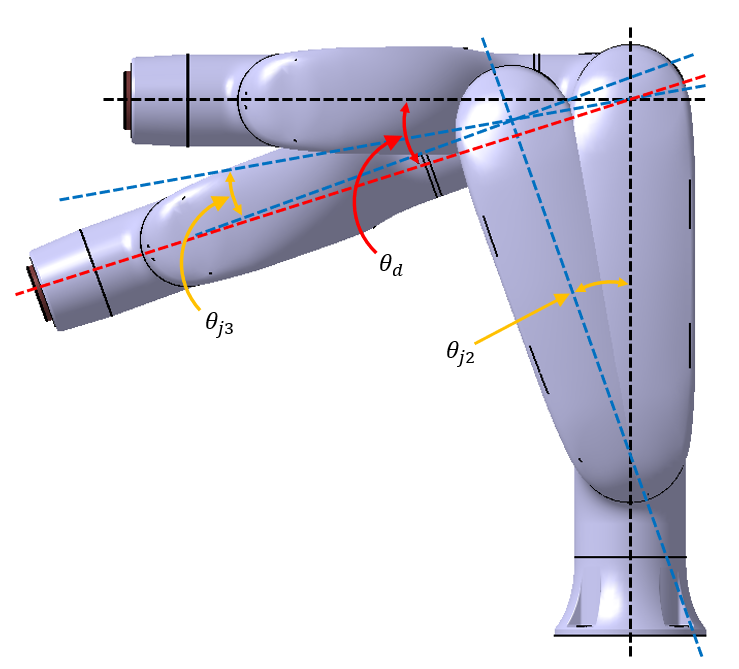
The pose when the stop is initiated and the measured angle ()
Pose when the stop is initiated
Measured Angle
Joint1
No slip,
Joint2
Joint3
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.