
Nomi e funzioni
Manipolatore

Nomi delle parti
No | Nome | No | Nome |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Flangia dell'attrezzo |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
Caratteristiche principali
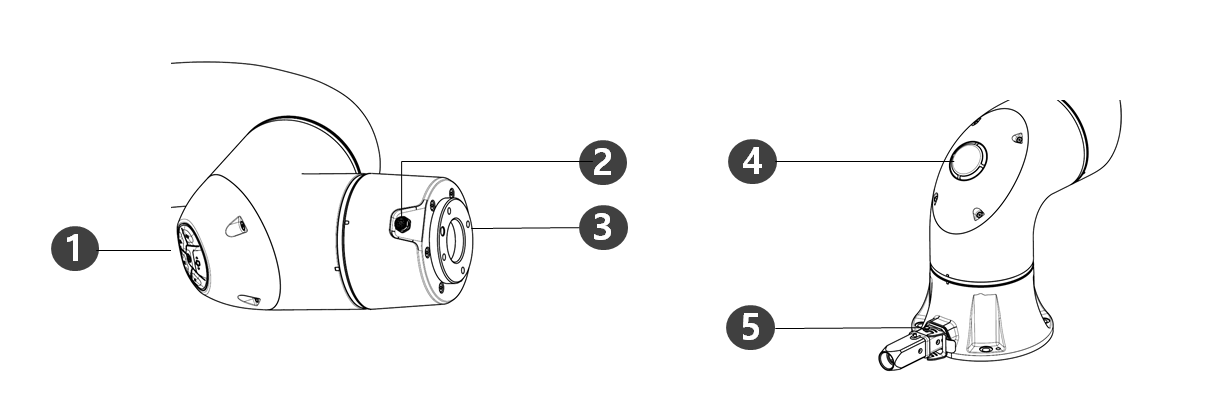
No | Elemento | Descrizione |
|---|---|---|
1 | Cabina di pilotaggio | [Opzione] Controller utilizzato per l'apprendimento diretto. |
2 | I/o flangia | Porta i/o per il controllo dell'utensile. |
3 | Flangia dell'attrezzo | Area di installazione degli attrezzi. |
4 | LED | Visualizza lo stato del robot con colori diversi. Per ulteriori informazioni sullo stato del robot, fare riferimento alla Colore LED di stato e flangia per ciascuna modalitàsezione "." |
5 | Connettore | Utilizzato per l'alimentazione e la comunicazione del robot. |
Centralina

No | Elemento | Descrizione |
|---|---|---|
1 | Terminale di collegamento i/o (interno) | Può essere collegato con controller o periferiche di altri robot. |
| 2 | Terminale di connessione di rete | Utilizzato per il collegamento al terminale di connessione di rete all'interno del controller per l'utilizzo di computer portatili, dispositivi TCP/IP e apparecchiature Modbus. |
| 3 | Terminale/interruttore di collegamento alimentazione | Utilizzato per collegare l'alimentazione di rete del controller per accenderlo o spegnerlo. Per ulteriori informazioni, fare riferimento a Accendere/spegnere il sistema. |
| 4 | Terminale di collegamento USB | Consente di memorizzare i registri creati mentre il robot è in funzione nell'archiviazione USB o di esportare e importare attività. |
| 5 | Terminale di collegamento del cavo manipolatore | Utilizzato per collegare il cavo del manipolatore al controller. |
| 6 | Terminale di collegamento del cavo del teach pendant | Utilizzato per collegare il cavo del teach pendant alla centralina. |
Teach pendant
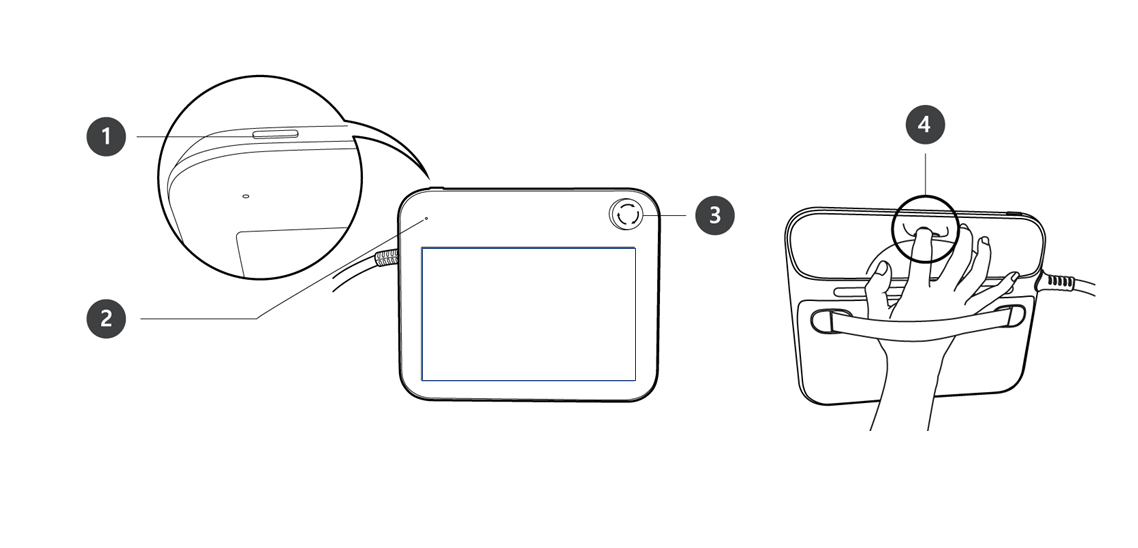
No | Elemento | Descrizione |
|---|---|---|
1 | Pulsante di accensione | Utilizzato per ATTIVARE/disattivare l'alimentazione principale del teach pendant. Per ulteriori informazioni, fare riferimento a Accendere/spegnere il sistema. |
2 | LED di alimentazione | Si ACCENDE quando viene fornita alimentazione. |
3 | Pulsante di arresto di emergenza | In caso di emergenza, premere il pulsante per arrestare il funzionamento del robot. |
4 | Pulsante di guida manuale | Tenere premuto il pulsante per spostare liberamente il robot nella posizione desiderata. |
Nota
- Se il teach pendant deve essere protetto e montato durante il funzionamento, il coperchio morbido fornito da noi lo rende più sicuro e facile da usare.