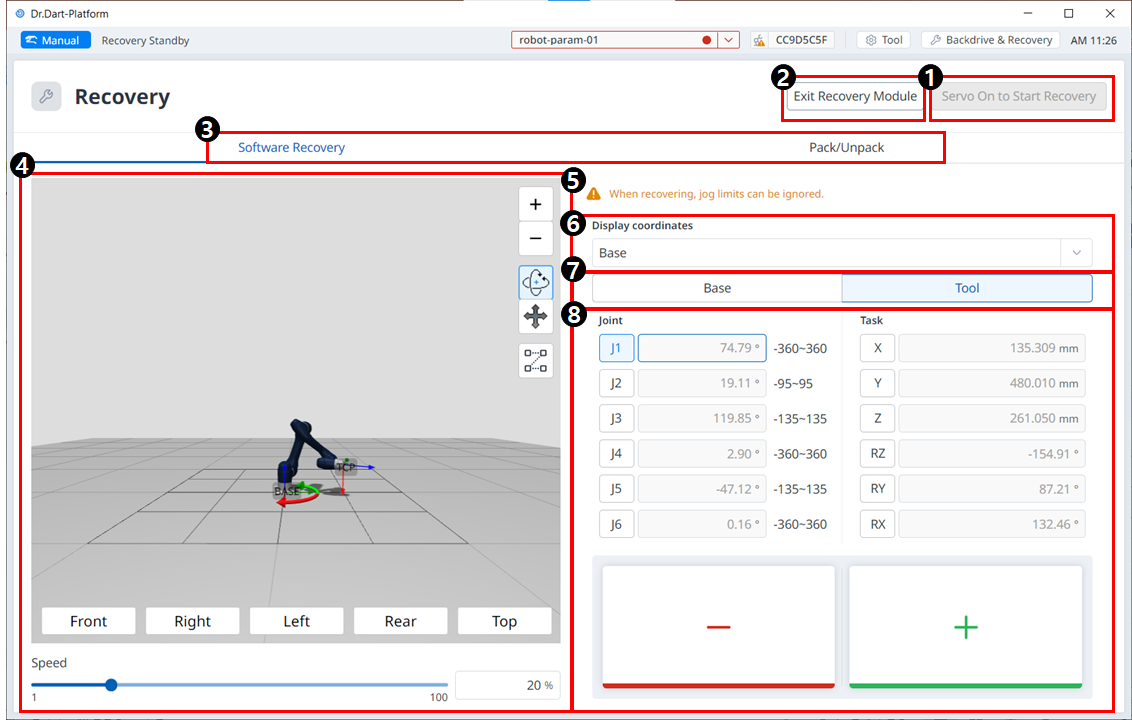
Questo pulsante consente di attivare il servocomando prima di entrare in modalità di ripristino.
2
Uscire da Recovery
Questo pulsante consente di uscire dal modulo di ripristino.
3
Intestazione
Questa sezione consente di selezionare la modalità di ripristino software o la modalità di compressione/disimballaggio.
4
Simulazione 3D.
Quest'area consente di visualizzare in anteprima una simulazione 3D dei valori impostati.
5
Messaggio di avvertimento
Questo spiega le precauzioni.
6
Visualizza coordinate
Qui è possibile impostare le coordinate in base alla base o al mondo.
7
Pulsante base/strumento
Qui è possibile impostare il valore in base alla base o allo strumento.
8
Joint/Task
Questa sezione consente di immettere i valori desiderati per far muovere il robot.
Per utilizzare la modalità di ripristino del software, attenersi alla seguente procedura:
Toccareilmenu Ripristino nella finestra Menu principale.Laschermata Ripristino software viene visualizzata automaticamente nella finestra Ripristino.
Toccare ciascun pulsante giunto sul lato destro della schermata di ripristino software e utilizzare, i pulsanti e per impostare la posizione.Oppure premere dei pulsanti del cockpit per regolare l'angolo del giunto mediante l'apprendimento diretto.
Per le definizioni dei pulsanti del cockpit, vedere Cockpit
Le modifiche apportate all'impostazione vengono riflesse nella finestra di simulazione a sinistra in tempo reale.
Al termine dell'impostazione, toccare ilpulsante X in alto a sinistra per chiudere la finestra.
Attenzione
La modalità di riparazione software non è disponibile quando il limite dell'angolo del giunto viene superato di 3 gradi.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.