Panoramica dell'angolo di Eulero
L'angolo di Eulero è un modo per esprimere gli angoli degli assi X, Y e Z, perpendicolari tra loro nella direzione dell'oggetto. A, B e C si riferiscono agli angoli di rotazione sequenziali. Ogni produttore di robot definisce questo ordine di rotazione A, B e C in modo diverso, come Rz-Ry-Rx o Rx-Ry-Rz.
Doosan Robotics usa Rz-Ry-Rz. Qui, Rz indica la rotazione nell'asse Z, mentre Ry indica la rotazione nell'asse Y. RZ può essere espresso come angolo A, Ry come angolo B e Rz come angolo C per indicare la direzione di rotazione corrente di un oggetto. Si noti che una volta effettuata la rotazione in direzione dell'asse Z dalle coordinate, le rotazioni saranno effettuate in base alle nuove coordinate.
Questo può essere visualizzato con i passaggi da 1 a 4.
Si supponga che ci siano coordinate (X, Y, Z).
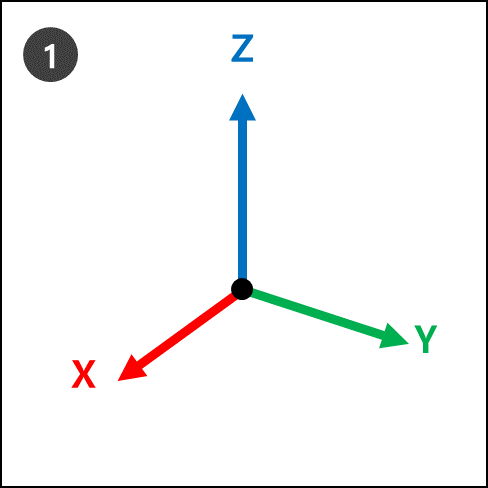
RZ: Ruotare di un grado dall'asse Z.
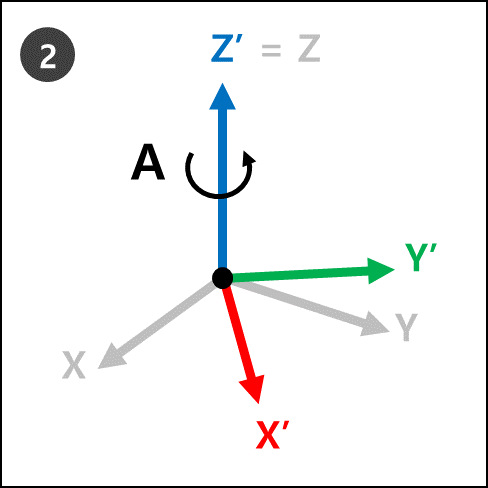
Ry : Ruotare di B gradi dal nuovo asse Y (Y’) delle nuove coordinate (X’, Y’, Z’) al punto 2.
RZ : Ruotare di B gradi dal nuovo asse Z (Z») delle nuove coordinate (X», Y», Z») al punto 3.
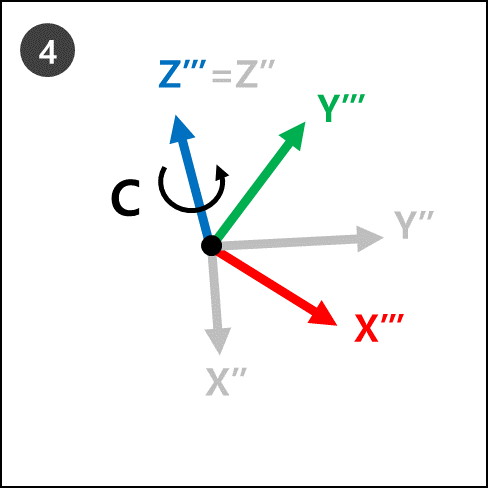
Le nuove coordinate (Z’’’, Y’’’’, X’’’’ della fase 4 si riferiscono alla rotazione corrente del robot quando vengono applicati gli angoli Eulero A, B e C.
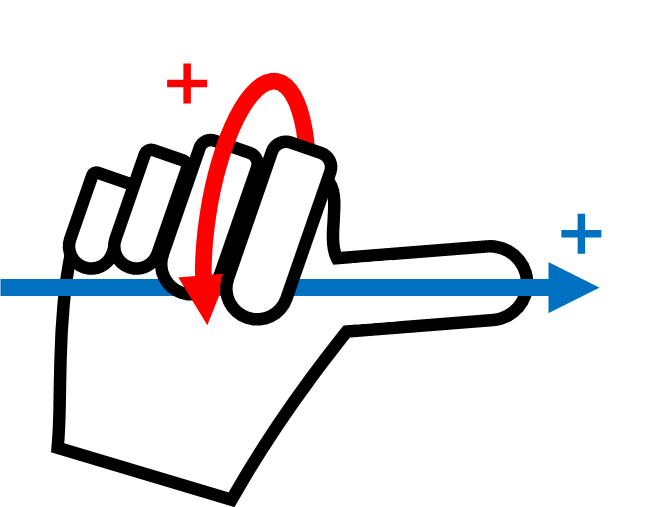
Questo può essere facilmente visualizzato con la mano destra. Eseguire la posa seguente con la mano destra. Questa regola è detta regola della mano destra, e rendendo il pollice (asse X), il dito indice (asse Y) e il dito medio (asse Z) perpendicolari l'uno all'altro creeranno coordinate costituite dagli assi X, Y e Z.
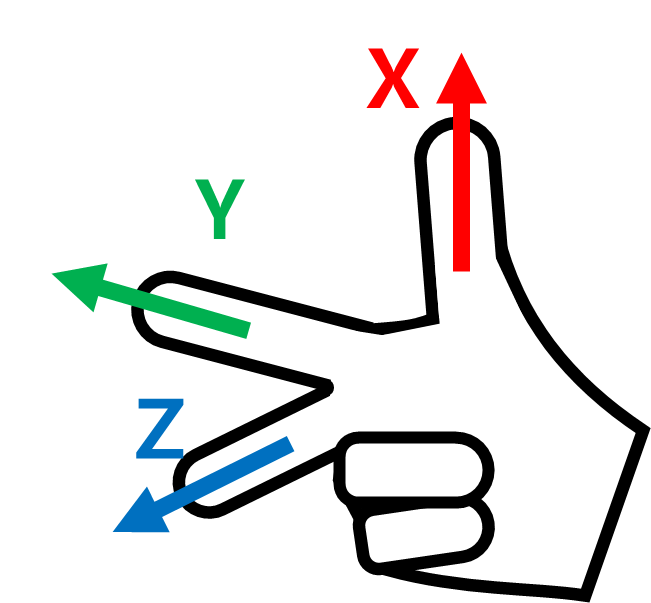
Quindi, eseguire la posa cartesiana della regola di destra e le rotazioni Rz, Ry e Rz in ordine sequenziale.
RZ: Ruotare il dito medio (asse Z) di gradi.
Ry: Ruotare il dito indice (asse Y) di B gradi.
RZ: Ruotare il dito medio (asse Z) di gradi C.
Nota
La direzione di rotazione + di A, B e C è la direzione di quattro dita, ad eccezione del pollice, quando il pollice è rivolto verso la direzione + e le quattro dita sono bloccate. Questa è la legge della vite in senso orario.