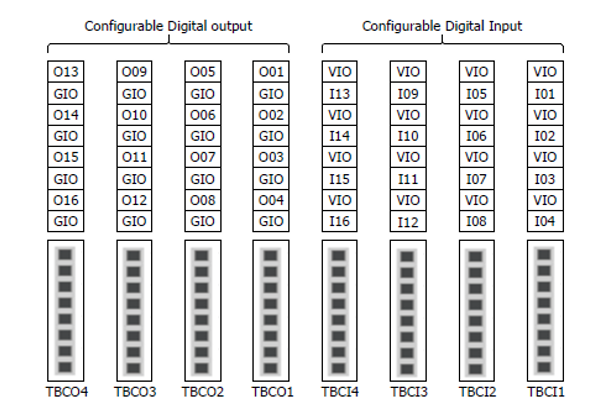
Configurazione i/o digitale configurabile (TBCI1 - 4, TBCO1 - 4)
Il controller è configurato con 16 ingressi digitali e 16 uscite digitali. Gli i/o digitali mostrati nella figura seguente possono essere collegati alle periferiche necessarie per il controllo del robot o possono essere impostati come iOS di sicurezza ridondanti per essere utilizzati come i/o del segnale di sicurezza.
Le specifiche elettriche dell'i/o digitale #configurabile# sono le seguenti:
#Terminale# | Parametro | Specifiche | |
|---|---|---|---|
Uscita digitale | [Oxx] | Tensione | 0 - 24 V. |
[Oxx] | Corrente | 0 - 1 A. | |
[Oxx] | Caduta di tensione | 0 - 1 V. | |
[Oxx] | Corrente di dispersione | 0 - 0,1 ma | |
Ingresso digitale | [Ixx] | Tensione | 0 - 30 V. |
[Ixx] | FUORI gamma | 0 - 5 V. | |
[Ixx] | A portata | 11 - 30 V. | |
[Ixx] | Corrente | Da 2 a 15 ma | |
Attenzione
- I terminali VIO (io 24V) e GIO (io GND), che possono essere utilizzati come alimentatori per i/o digitali, sono separati dagli altri alimentatori, VCC (24V) e GND, sul circuito i/o di sicurezza. Prestare attenzione, Poiché le funzioni diagnostiche del robot rilevano gli errori e interrompono l'alimentazione del robot se l'alimentazione interna è collegata come alimentazione di i/o digitale tramite la morsettiera per l'alimentazione di i/o digitale (TBPWR) o se l'alimentazione a 24 V non è fornita al I terminali VIO e GIO attraverso un alimentatore esterno, l'i/o digitale configurabile non funziona.
Quando l'i/o digitale configurabile viene utilizzato come i/o digitale generale, può essere utilizzato in vari modi, ad esempio per il funzionamento di apparecchiature a bassa corrente come elettrovalvole per la tensione o lo scambio di segnali con sistemi o periferiche PLC. Di seguito viene descritto come utilizzare l'i/o digitale configurabile:
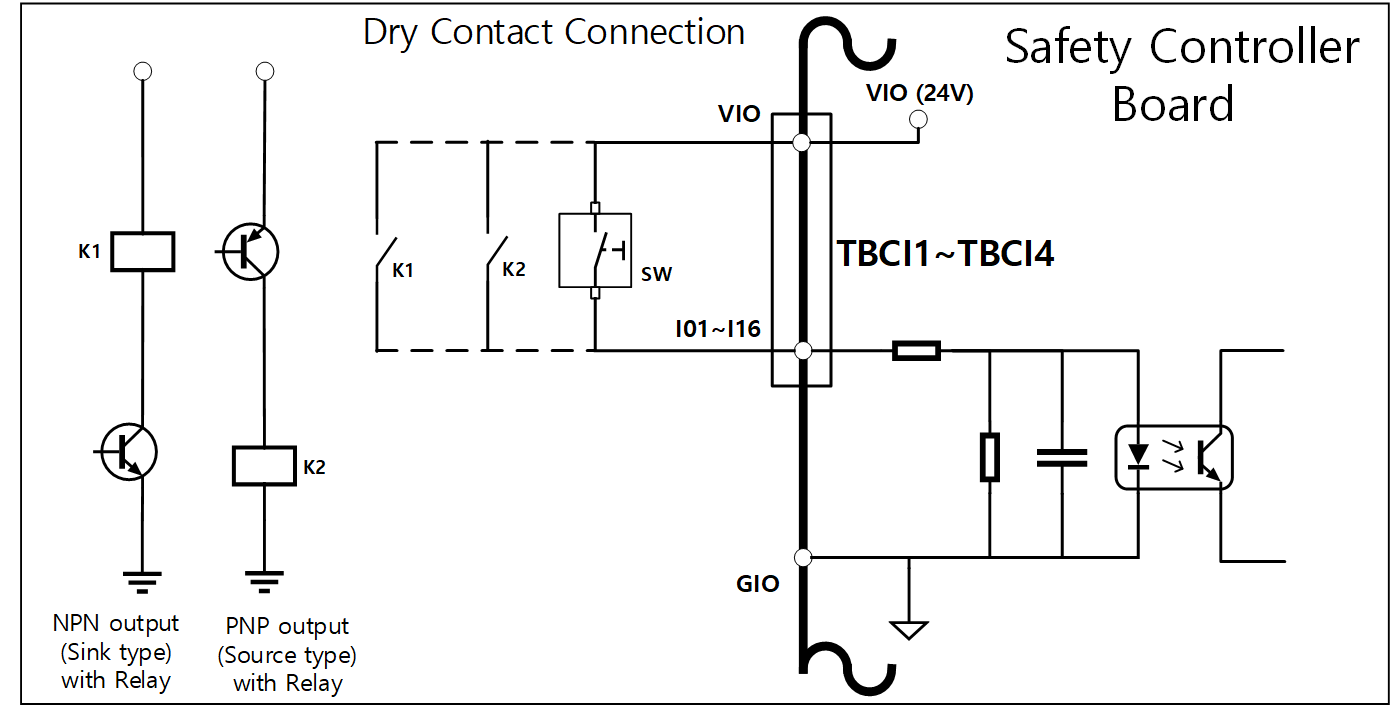
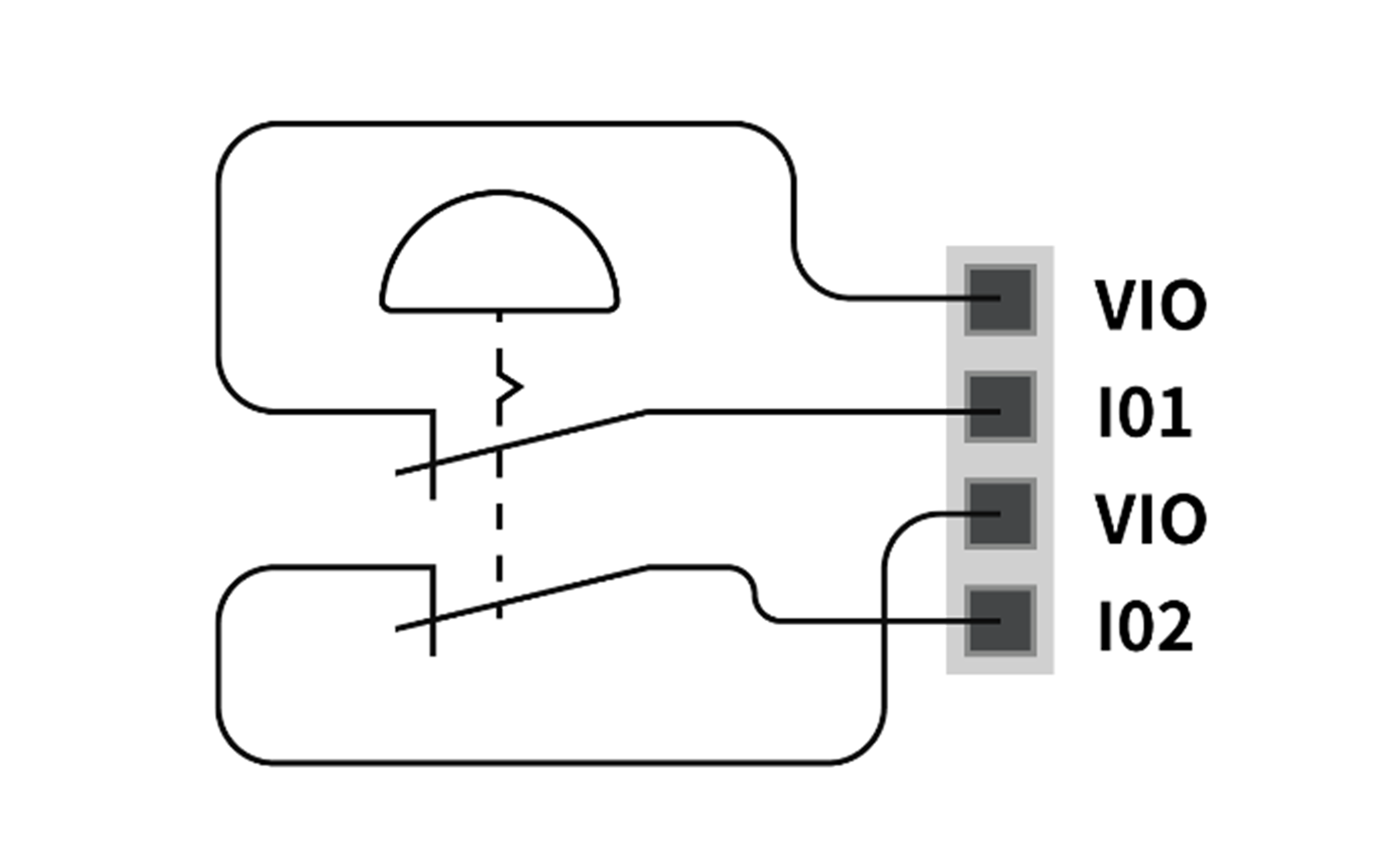
Se si riceve l'input #dry contact#
Si tratta di un metodo per collegare un #switch# o #contact# tra il terminale VIO delle morsettiere TBCI1-TBCI4 e i terminali Ixx. L'uscita del dispositivo esterno agisce solo sull'apertura/chiusura# del contatto attraverso il relè, quindi è elettricamente isolata dai dispositivi esterni.
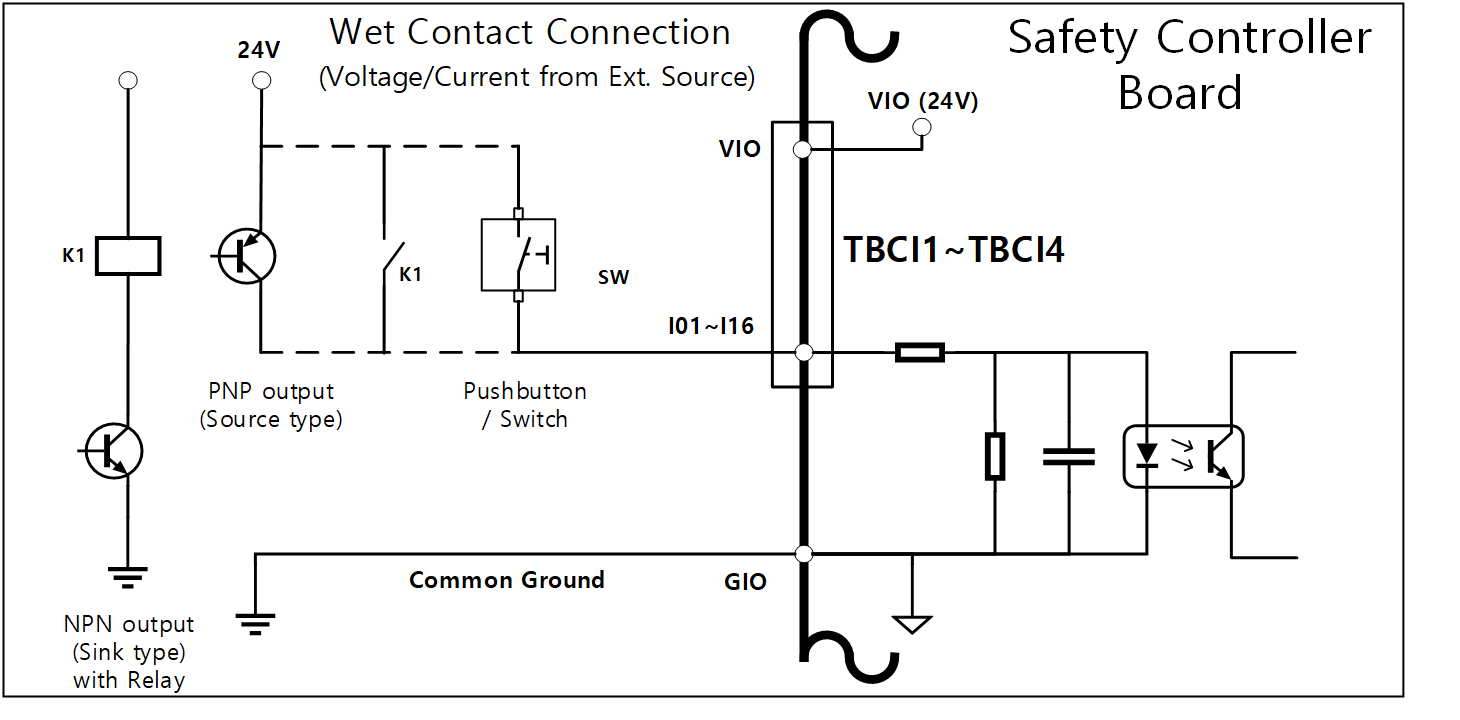
Se si riceve l'input #wet contact#
Riceve segnali di tensione da dispositivi esterni. Se l'uscita del dispositivo di destinazione è di tipo sorgente, riceve una tensione di 24 V/0 V come ingresso. Se l'uscita del dispositivo di destinazione è #sink type#, è possibile aggiungere un relè per ricevere una tensione di 24 V/0 V come ingresso. Poiché l'ingresso di tensione richiede un riferimento, i dispositivi esterni e l'alimentatore esterno devono essere collegati a una #massa# comune.
Se viene azionato un carico semplice
Si tratta di un metodo di collegamento dei carichi tra i terminali Oxx delle morsettiere TBCO1-TBCO4 e il terminale GIO. Ogni terminale è in grado di emettere un massimo di 1 a, ma la corrente complessiva può essere limitata in base al potere calorifico e al carico.
Se l'alimentazione i/o digitale (VIO/GIO) viene fornita tramite l'alimentazione interna come nell'impostazione predefinita di fabbrica, è possibile utilizzare fino a 2 a di corrente VIO. Se è necessaria una corrente totale superiore a 2 a, rimuovere il collegamento tra l'alimentatore i/o digitale (VIO/GIO) della morsettiera per l'alimentazione i/o digitale (TBPWR) e l'alimentatore interno (VCC/GND) e collegare un alimentatore esterno.

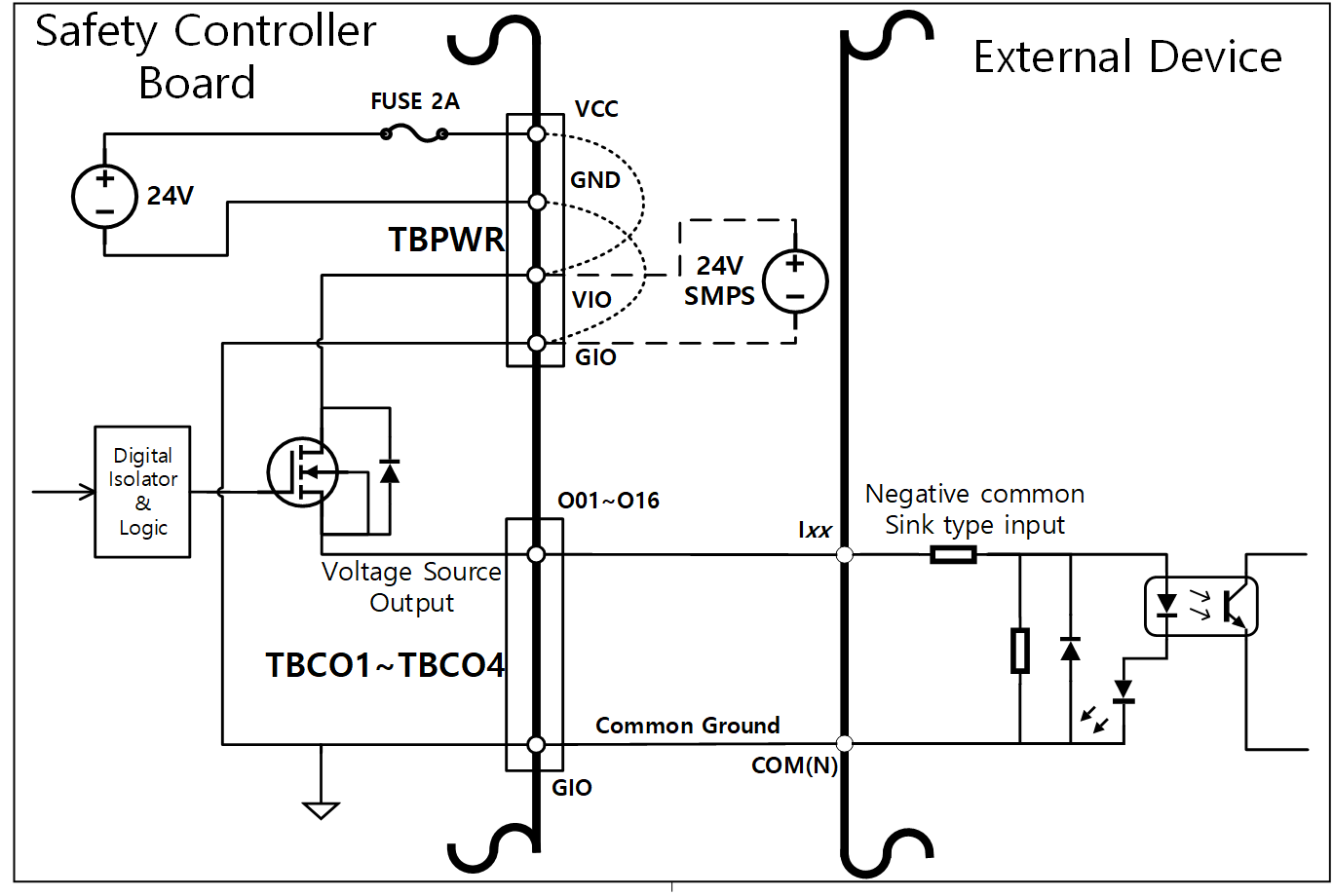
Se è collegato un dispositivo di input #negative common & sink type#
Quando si collega l'uscita dell'io digitale a un dispositivo di ingresso di tipo sink, collegare i terminali Oxx delle morsettiere TBCO1 - TBCO4 al terminale di ingresso del dispositivo esterno e collegare GIO al negativo comune del dispositivo esterno per stabilire una messa a terra comune.
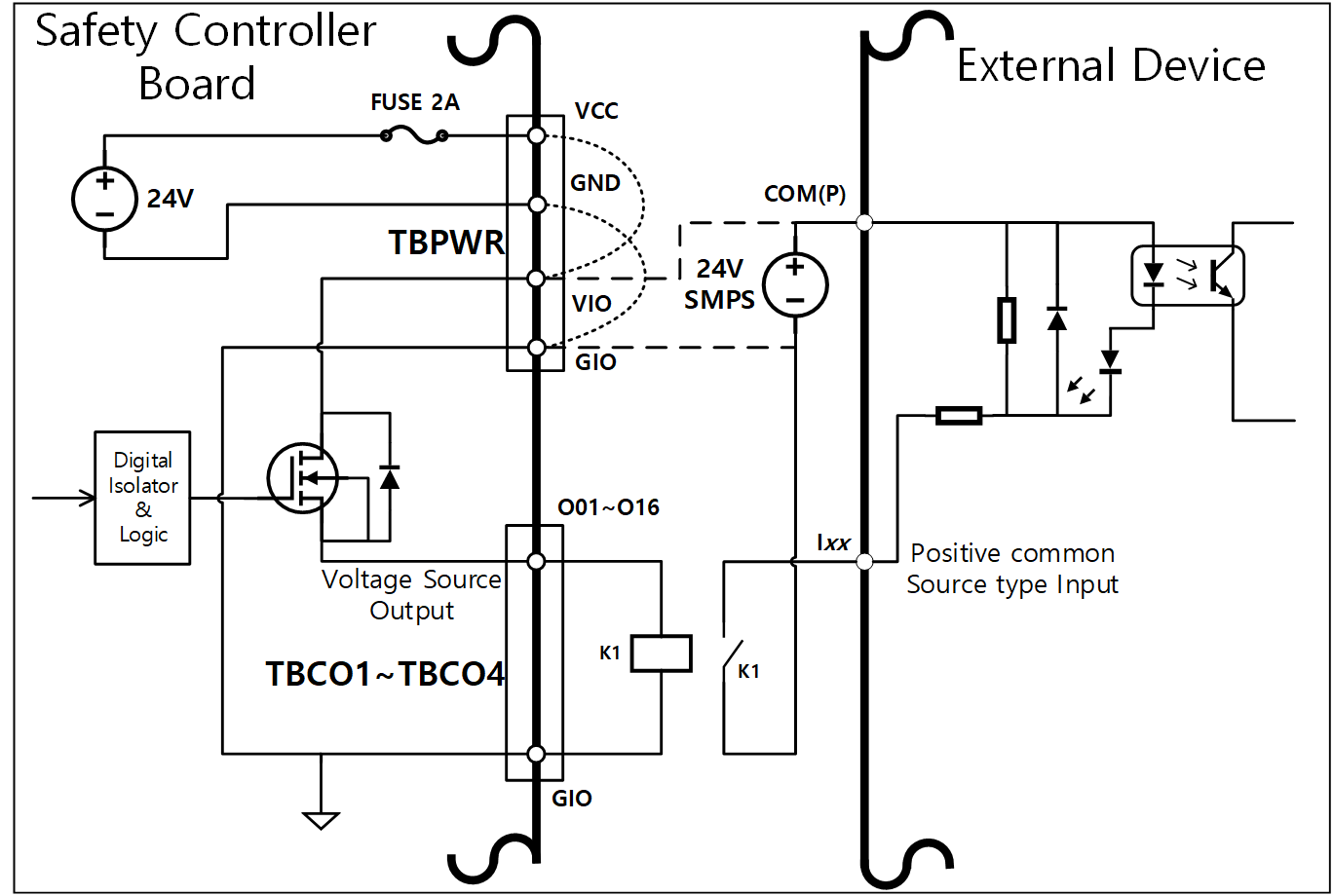
Se è collegato un dispositivo di input #positive common & source type#
Collegare un relè tra il terminale Oxx delle morsettiere TBCO1-TBCO4 e il terminale GIO per fornire i segnali di ingresso come contatti al dispositivo esterno. Se necessario, è possibile collegare un alimentatore esterno al dispositivo esterno.
Attenzione
- Il funzionamento dei dispositivi io digitali generali può essere interrotto in qualsiasi momento interrompendo l'alimentazione al controller, rilevando gli errori tramite autodiagnosi e le impostazioni del programma di attività. Pertanto, eseguire una valutazione dei rischi prima di configurare la cella di lavoro del robot e assicurarsi di implementare ulteriori misure di sicurezza qualora siano previsti ulteriori rischi, come la caduta del pezzo in lavorazione, l'arresto, la negligenza dell'ingresso digitale dovuta alla disattivazione delle uscite digitali o errori di sincronizzazione dovuti a fraintendimenti.
- L'i/o digitale #General# è un i/o di tipo a collegamento singolo e qualsiasi corto circuito o guasto può causare la perdita delle funzioni di sicurezza, pertanto non può essere utilizzato per scopi di sicurezza. Se è necessario il collegamento di un dispositivo di sicurezza o di un i/o del segnale relativo alla sicurezza, assicurarsi di impostare il terminale corrispondente come i/o di sicurezza ridondante sul teach pendant.
Quando l'io digitale configurabile viene utilizzato come io di sicurezza
O01 E O02, … , O15 & O16, I01 & I02, .. I15 e I16 possono utilizzare segnali di sicurezza identici per formare un doppio i/O. di sicurezza
Il terminale di ingresso dedicato del terminale di uscita contatto di sicurezza (TBSFT) può collegare solo un segnale di contatto a secco, ma il set di ingressi come Safety io può collegare sia segnali di tipo di contatto (contatto a secco) che di tipo di tensione (contatto a umido). L'uscita impostata su i/o di sicurezza eroga tensione, ma se necessario, è possibile aggiungere un relè esternamente per configurare un'uscita di tipo contatto.
Di seguito è riportato un esempio di collegamento di un dispositivo di sicurezza per il funzionamento.
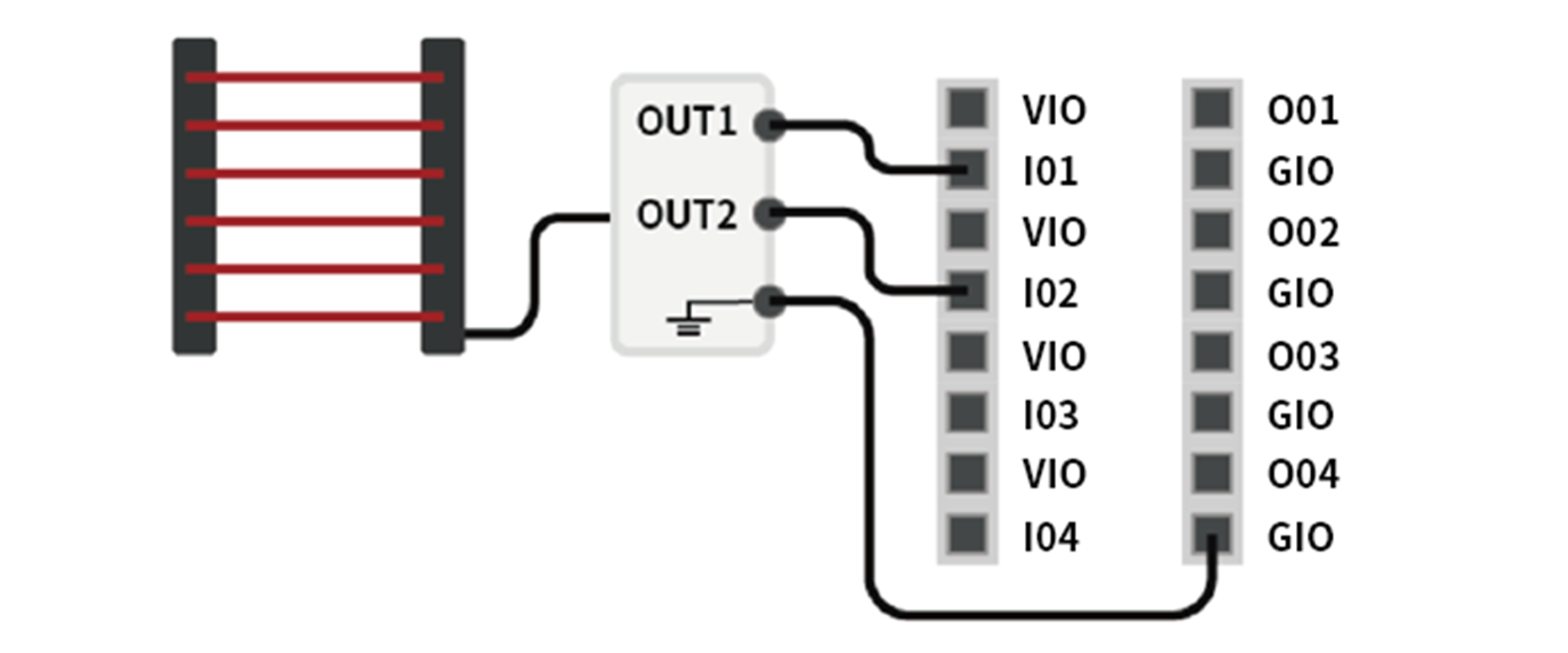
- Collegare un interruttore di emergenza con segnale di contatto (contatto a secco) come terminale di ingresso di sicurezza
- Collegare una barriera fotoelettrica segnaletica di tipo tensione (contatto bagnato) come terminale di ingresso di sicurezza (massa comune)