Eseguire in base al giunto del robot
Per regolare l'angolo in base al giunto del robot, attenersi alla seguente procedura:
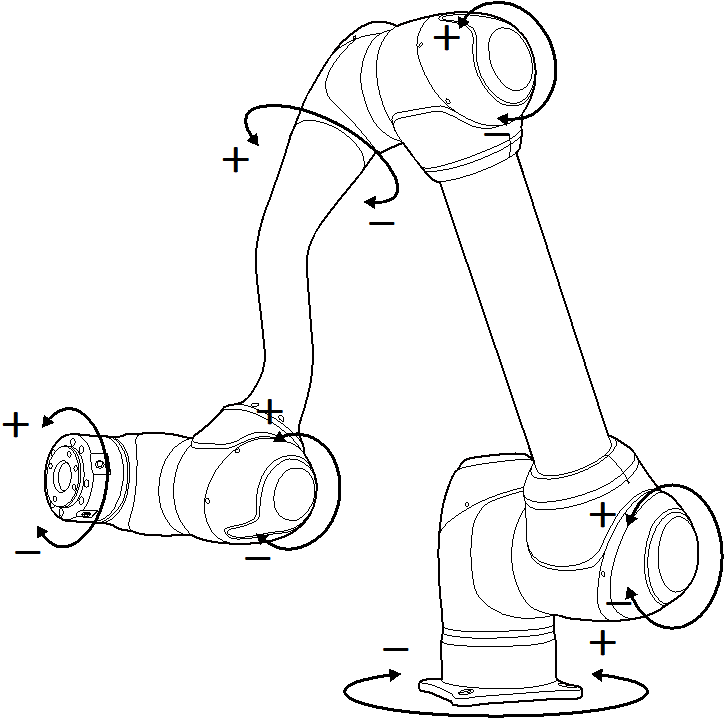
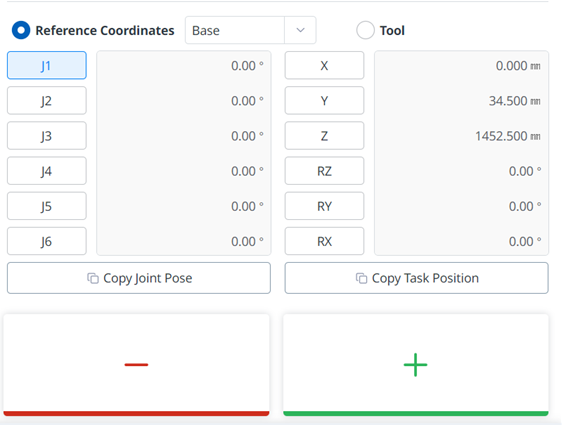
- Selezionare l'asse (J1-J6) per regolare l'angolo sul pannello comune.
- Tenere premuti i pulsanti di direzione (