
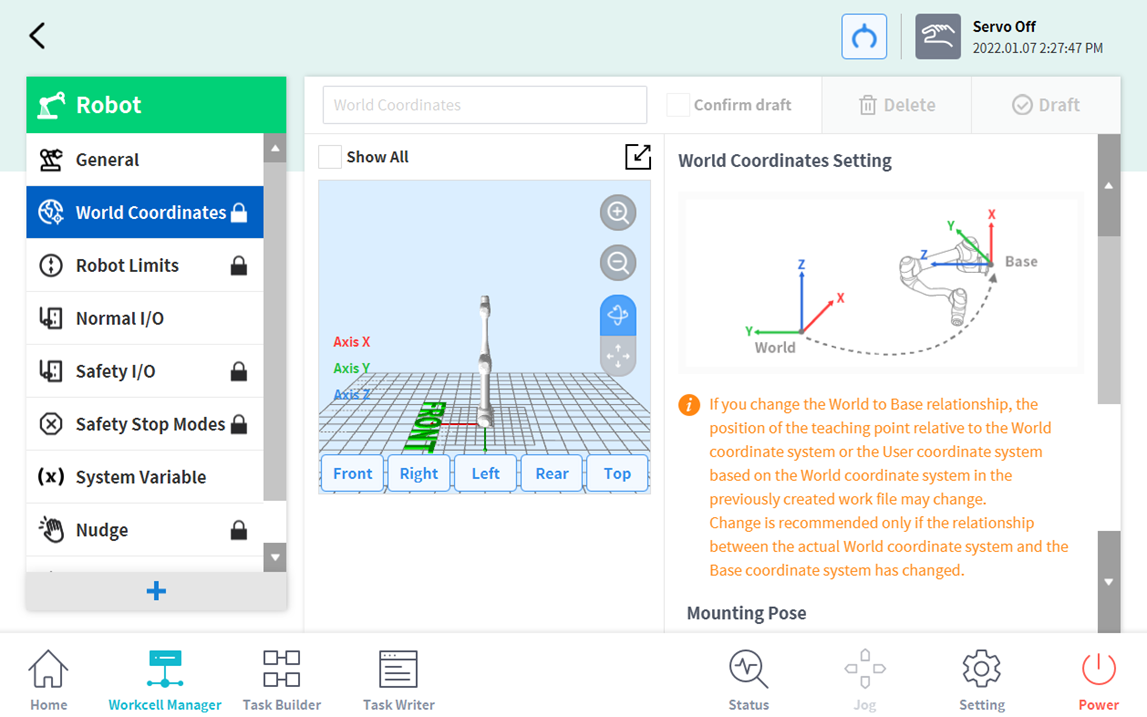
World Coordinates Setting (Impostazione delle coordinate mondo)
È possibile impostare un sistema di coordinate che rappresenta il robot e il pezzo in lavorazione. Queste coordinate sono dette Coordinate Mondo e sono diverse dalle Coordinate Base, riferite alla base. È possibile impostare la posizione delle Coordinate Base utilizzando le Coordinate Mondo e queste ultime possono essere selezionate durante l'apprendimento e il movimento del robot tramite Task Builder e Task Writer. Per impostare le Coordinate Mondo, toccare il pulsante Add (Aggiungi) 
- Toccare il pulsante Edit (Modifica) in alto.
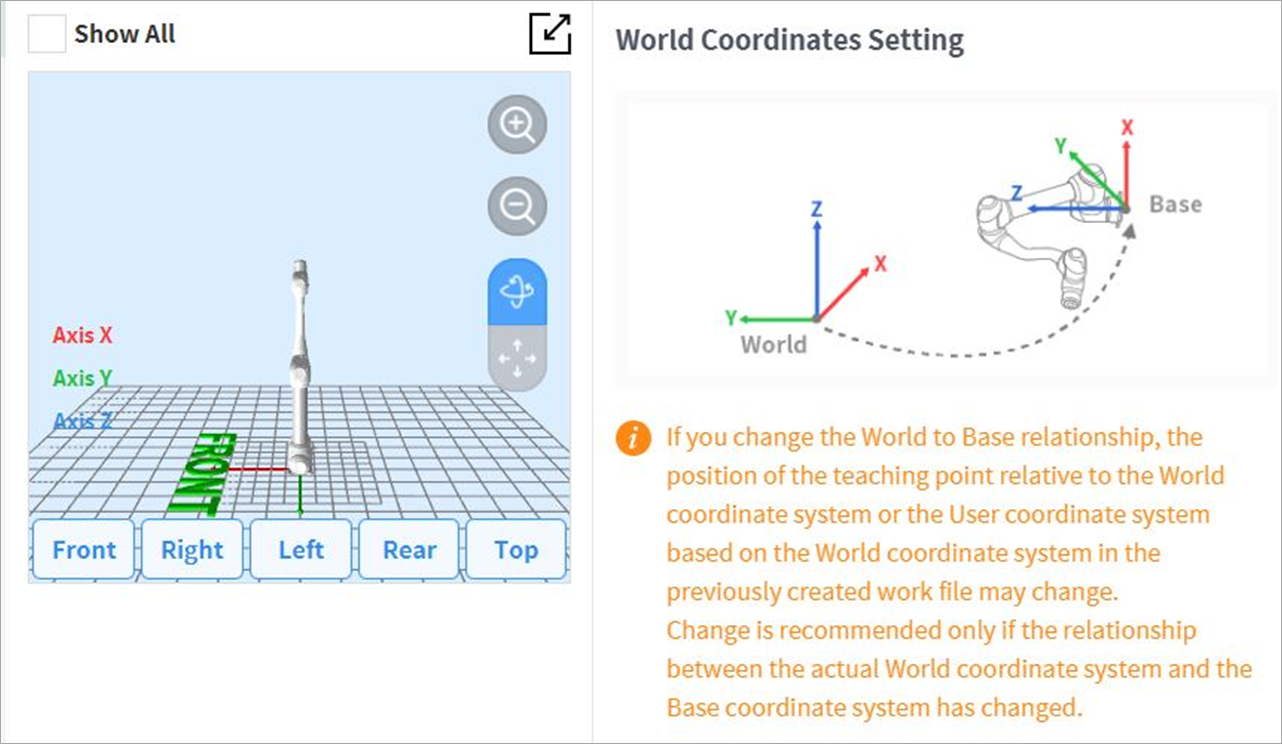
Fare riferimento alla figura che riproduce la relazione tra le Coordinate Mondo e le Coordinate Base, oltre a tutte le precauzioni del caso.
Avvertimento
Quando si modifica la relazione tra le coordinate Mondo e Base, il punto di apprendimento delle Coordinate Mondo o le coordinate utente basate su queste può variare. Le variazioni sono consigliate solo nel caso in cui si modifichi la relazione effettiva tra Coordinate Mondo e Coordinate Base.
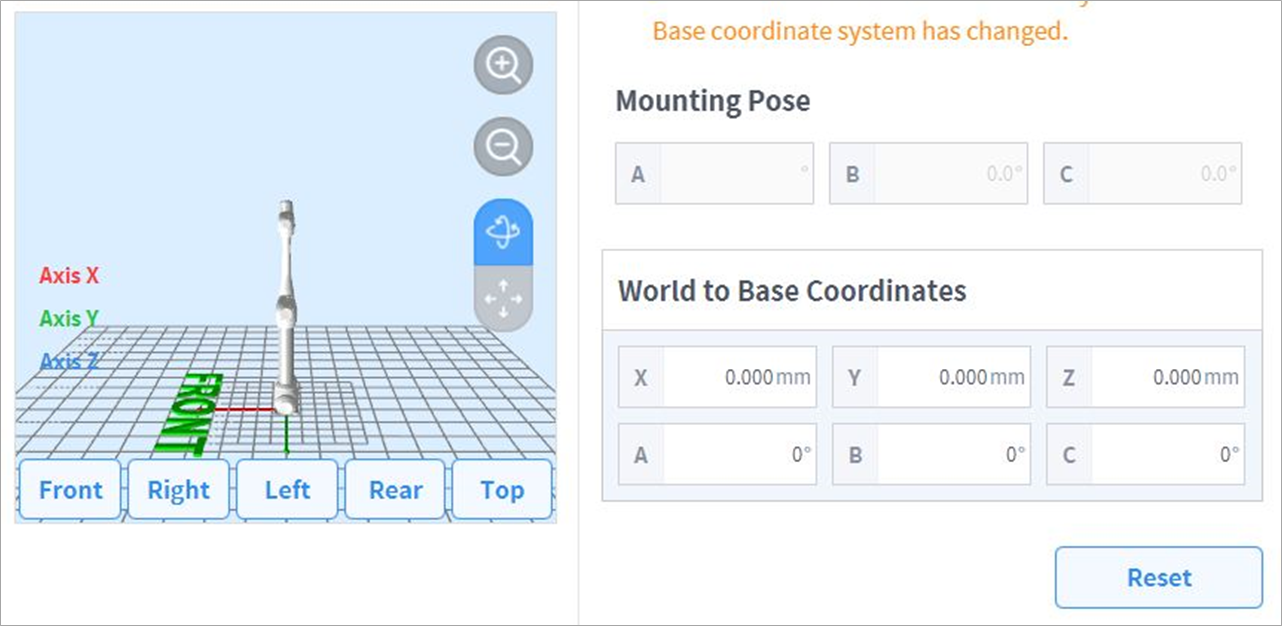
- La posizione di montaggio (inclinazione di installazione) è visualizzata a destra al centro. In generale, le Coordinate Mondo descrivono l'ambiente di lavoro dalla prospettiva dell'utente, per cui la direzione Z delle Coordinate Mondo è quella verso il soffitto. Dal momento che un asse delle Coordinate Base è fissato al piano inferiore del robot, il rapporto tra Coordinate Mondo e Coordinate Base varia in accordo con l'ubicazione/posizione di installazione del robot. La figura sopra presuppone che il robot sia installato su una parete. In tal caso, l'asse Z delle Coordinate Base è perpendicolare alla parete, parallela all'asse Y delle Coordinate Mondo, è l'inclinazione e la rotazione della posizione di montaggio sono visualizzate rispettivamente come 90 e 0 gradi. La relazione tra Coordinate Mondo e Base è definita come la relazione delle Coordinate Base rispetto alle Coordinate Mondo. Nel caso in cui vi sia un layout predefinito dell'ambiente di lavoro, impostare le coordinate di conseguenza. I valori X/Y/Z indicano il movimento, mentre i valori A/B/C indicano la rotazione in base alla definizione di Eulero Z-Y-Z. Se la posizione di montaggio è definita in base alla posizione di installazione del robot, è appropriato utilizzare l'angolo di rotazione B/C come posizione di montaggio B/C. Tuttavia, se la posizione di montaggio viene impostata utilizzando la funzione di assunzione automatica, il valore assunto può contenere una deviazione, per cui si consiglia di usare l'angolo di rotazione definito in base al layout.
- Toccare il pulsante Apply (Applica).
- Toccare il pulsante Confirm.
Nota
I programmi utente creati utilizzando Task Builder e Task Writer dopo aver applicato l'inclinazione di installazione in versioni SW precedenti la GF020400 devono impostare le Coordinate Mondo con l'inclinazione di installazione applicata durante l'aggiornamento alle versioni SW successive alla GF020400 e convertire tutte le Coordinate Base in Coordinate Mondo nel programma utente per poter utilizzare correttamente i punti di apprendimento esistenti.
Nel caso di più robot che operino in uno spazio di lavoro comune e se il robot è installato su un dispositivo mobile come una base mobile o un binario lineare, il rapporto e la posizione del punto di apprendimento tra pezzo in lavorazione e base del robot possono variare . In tali ambienti, è possibile impostare le Coordinate Mondo, facili da utilizzare per l'apprendimento del lavoro e da condividere.
Quando un utensile viene installato o sostituito, è necessario configurarne il peso prima di azionare il robot. Per ulteriori informazioni impostazione del peso dell'utensile, vedere Tool Weight Setting (Impostazione del peso utensile).