
Impostazione del Tool Center Point
Quando si configura il Tool Center Point (TCP), è necessario anche definire la posizione e l'angolo di rotazione in base alle coordinate della flangia. La distanza dal punto iniziale prestabilito della coordinata della flangia al Tool Center Point (TCP) nelle direzioni X, Y e Z non può essere impostata su un valore superiore a 10000 mm. Inoltre, se le lunghezze convertite (
In particolare, se il TCP viene configurato con l'ausilio di Auto Calculate (Calcolo automatico), il calcolo viene effettuato solo sulla base della posizione di X, Y e Z , per cui è necessario inserire l'angolo di rotazione. L'angolo di rotazione può essere definito dagli elementi A, B e C e si basa sul metodo di rotazione Eulero Z-Y-Z.
Le definizioni dell'asse delle coordinate espresso con x, y, z e dell'asse delle coordinate espresso da X, Y, Z sono le seguenti:
- Asse coordinata di “Coordinata flangia” (x, y, z): La direzione dell'asse coordinata definito all'estremità della flangia è identica a quella della coordinata robot con un angolo del giunto del robot di (0,0,0,0,0,0).
- Asse coordinata di “Coordinata TCP” (X,Y,Z): L'asse coordinata è definito all'estremità dell'utensile montato all'estremità della flangia o dal punto di lavoro. L'angolo di rotazione di “Coordinata TCP” è definito in base alla “Coordinata flangia” nella sequenza da 1) a 3) che segue:
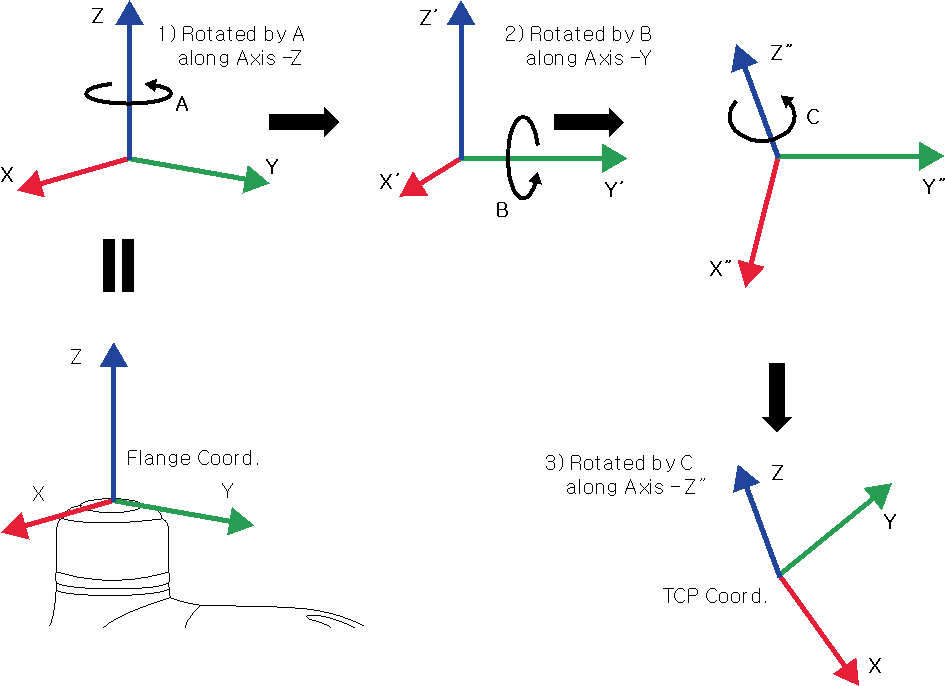
1) Ruotare di A gradi lungo l'asse z della Coordinata flangia
2) Ruotare di B gradi lungo l'asse y’ della coordinata ruotata in base a 1)
3) Ruotare di C gradi lungo l'asse z’’ della coordinata ruotata in base a 2)
Ecco alcuni esempi di configurazione del TCP secondo il metodo sopra descritto:
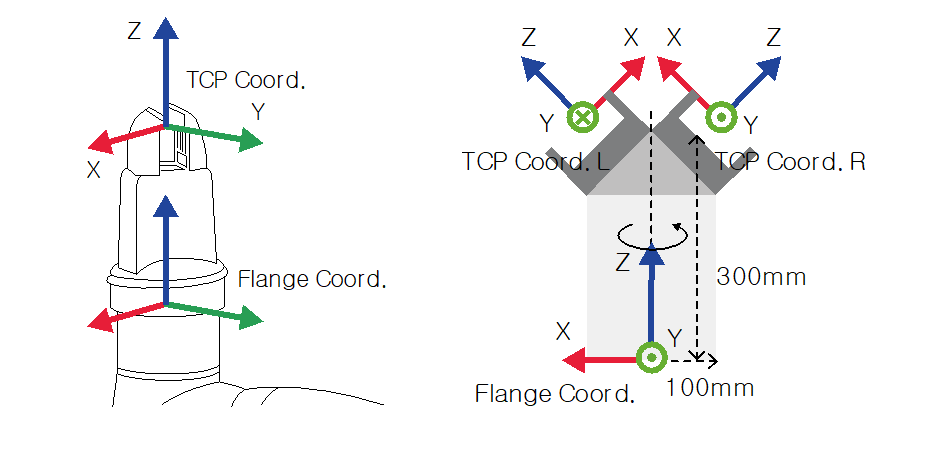
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Pinza generale con offset in direzione Z (Coord. TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Pinza sinistra con angolo di 45 gradi (Coord. TCP L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Pinza destra con angolo di 45 gradi (Coord. TCP R)