
Flange I/O
Il connettore fornisce l'alimentazione elettrica e i segnali di comando necessari all'azionamento della pinza o dei sensori integrati in particolari utensili del robot. Questi sono esempi di cavi industriali (è consentito l'impiego di cavi equivalenti):
- Phoenix contact 1404178 (Diritto)
- Phoenix contact 1404182 (Ad angolo retto)
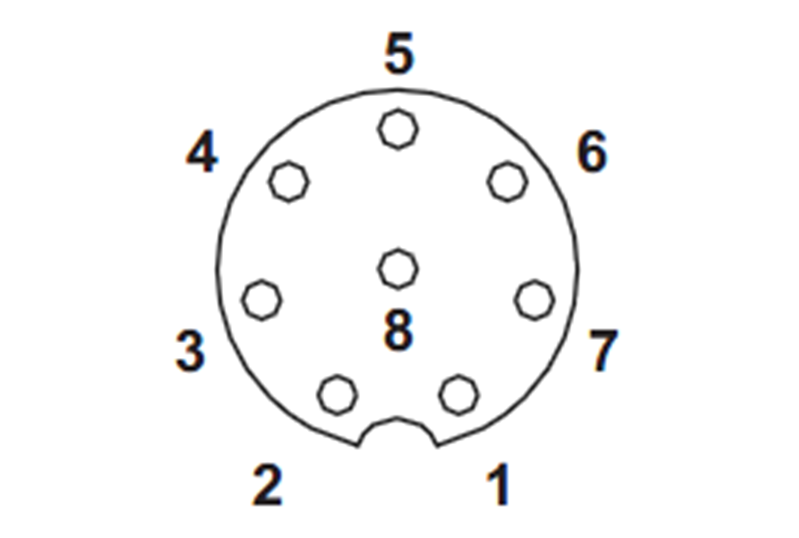
La piedinatura di ciascun connettore è la seguente:
Schema
Avvertimento
- Configurare l'utensile e la pinza in modo che non rappresentino un pericolo in caso di interruzione dell'alimentazione.
(es., caduta del workpiece dall'utensile)
- Il terminale N. 5 di ciascun connettore ha sempre un'uscita a 24 V quando il robot è alimentato, quindi assicurarsi di aver interrotto l'alimentazione al robot quando si procede alla configurazione dell'utensile e della pinza.