
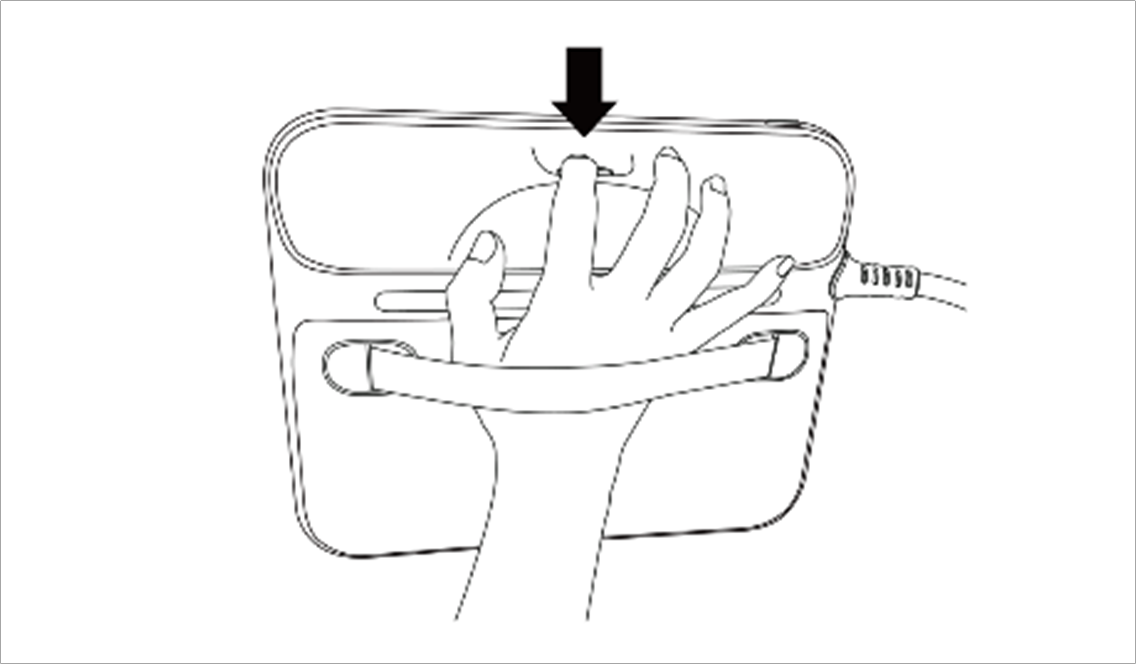
Pulsante di guida manuale su console portatile
L'utente può modificare la posizione del robot tenendo premuto il pulsante di guida manuale situato sulla parte posteriore della Teach pendant (console portatile).
Nota
Per impostazione predefinita, il pulsante di guida manuale può essere utilizzato solo in modalità Manuale e non può essere utilizzato in modalità Automatica quando i programmi attività di Task Builder e Task Writer sono in funzione. Tuttavia, se il robot è impostato sullo stato di Pronto per guida manuale mediante il comando Guida manuale del Task Writer, il pulsante può essere utilizzato anche in modalità Automatica.