Presentazione del prodotto (CS-04)
Denominazioni e funzioni
Controller CC (CS-04)
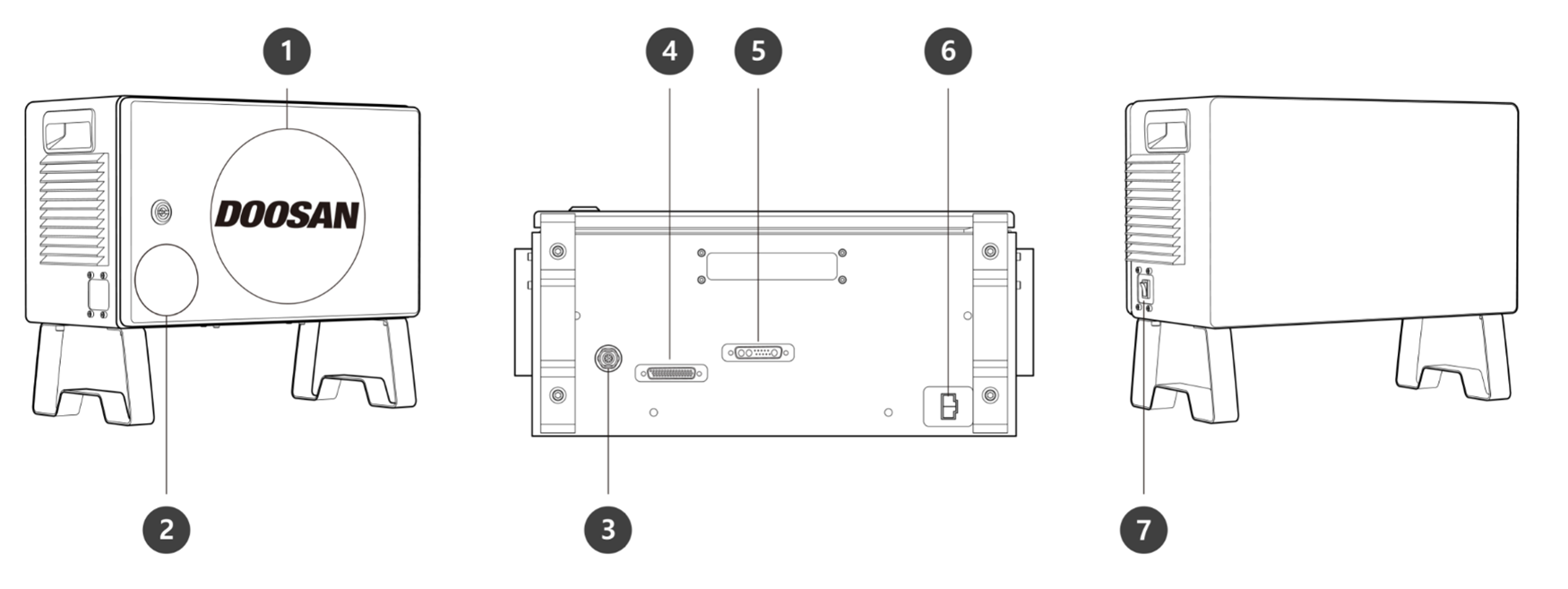
N. | Voce | Descrizione |
1 | I/O connection terminal (internal) | Il collegamento con controller di altri robot o con apparecchiature circostanti non è possibile. |
2 | Emergency Stop Button Setting switch | Lo switch deve essere impostato in base all'attuale composizione per consentire l'utilizzo della console intelligente o del pulsante d'arresto di emergenza. |
3 | Emergency stop button and Smart Pendant connection terminal | Consente il collegamento del pulsante di arresto d'emergenza o del cavo della console intelligente al controller. |
4 | Teach Pendant cable connection terminal | Consente il collegamento del cavo della console portatile al controller. |
5 | Manipulator cable connection terminal | Consente il collegamento del cavo del manipolatore al controller. |
6 | Power connection terminal | Consente il collegamento dell'alimentazione elettrica al controller. |
7 | Power switch | Inserisce/disinserisce (ON/OFF) l'alimentazione elettrica al controller. |
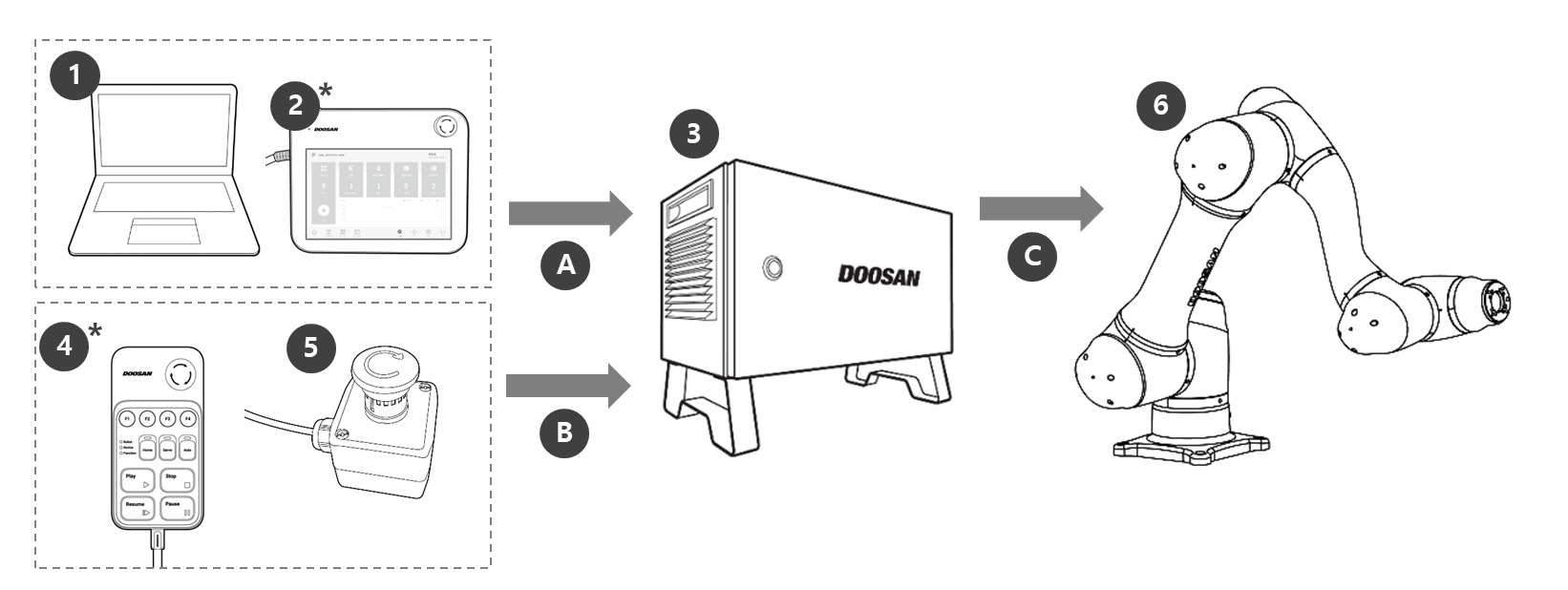
Configurazione di sistema
| N. | Voce | Descrizione |
|---|---|---|
| 1 | Laptop | Dopo aver installato DART Platform , è possibile configurare un ambiente di lavoro identico al Teach Pendant. Il laptop non è incluso nella confezione ed è necessario durante l'installazione della DART Platform . |
| 2 | Console portatile** | È un dispositivo che gestisce il sistema nel suo complesso ed è in grado di far apprendere al posizioni specifiche e di configurare il manipulator e gli elementi relativi all'installazione della centralina di comando e del manipulator . |
| 3 | Centralina di comando* | Controlla i movimenti del robot secondo la posizione o il movimento impostato tramite Teach Pendant. Presenta diverse porte I/O che consentono il collegamento di varie apparecchiature e dispositivi. |
| 4 | Smart Pendant** | Il robot può essere facilmente controllato utilizzando una console di telecomando in grado di eseguire semplici funzioni come l'accensione/spegnimento dei servoazionamenti (Servo ON/OFF) o l'esecuzione/chiusura di programmi preimpostati. |
| 5 | Pulsante di arresto di emergenza* | Se viene utilizzato un laptop come parte del sistema, esso funge da pulsante di arresto di emergenza del Teach Pendant |
| 6 | Manipulator* | È un robot collaborativo di tipo industriale in grado di svolgere operazioni di trasporto o assemblaggio per mezzo di svariati utensili. |
| A | Command/ Monitoring | |
| B | Command | |
| C | Power Supply/ Network |
- Le voci sono indicate come elementi standard (*) e elementi opzionali (**, venduti separatamente)
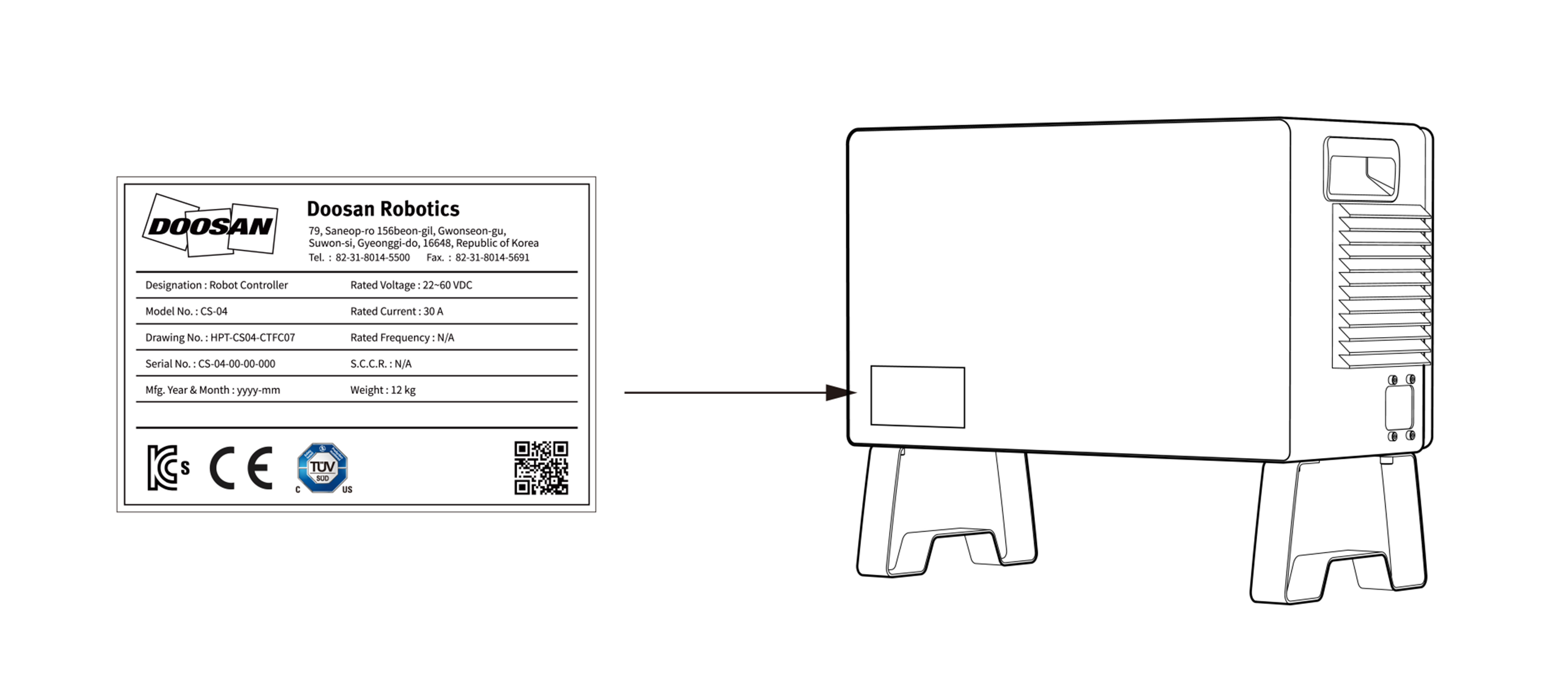
Targhetta ed etichetta