
Impostazione multi-segmento (waypoint)
A seconda del comando di movimento, potrebbe essere necessario configurare due o più waypoint. Ogni waypoint viene indicato come un segmento e l'aggiunta di un waypoint aggiungerà una riga nella parte inferiore del comando. I comandi di movimento che richiedono due o più segmenti vengono definiti “comandi di movimento multi-segmento.”
Di seguito è riportato un esempio di configurazione di un comando Move SJ.
- Toccare Add Pose (Aggiungi posizione) nelle proprietà del comando.
- Il segmento 1 viene aggiunto alla riga inferiore del comando Move SJ.

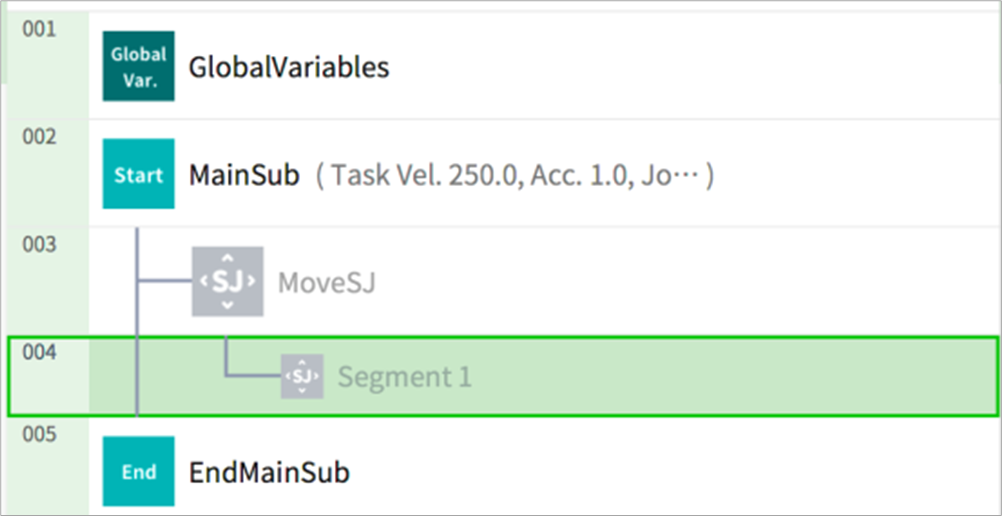
- Il segmento 1 viene aggiunto alla riga inferiore del comando Move SJ.
- Utilizzare la funzione jog (movimento a impulsi) o eseguire l'apprendimento diretto per spostare l'utensile nella posizione desiderata.
- Toccare il pulsante Save Pose (Salva posizione) nelle proprietà del segmento per memorizzare la posizione dell'utensile del robot.
- Ripetere i passaggi da 1 a 3 per aggiungere segmenti.