
Impostazione del Waypoint (punto di riferimento)
Per configurare il waypoint di un comando, procedere nel modo seguente:
- Selezionare il tipo (Absolute, Relative) (Assoluto, Relativo) delle coordinate di riferimento e il valore delle stesse.
- Utilizzare la funzione jog (movimento a impulsi) o eseguire l'apprendimento diretto per spostare il robot nella posizione desiderata.
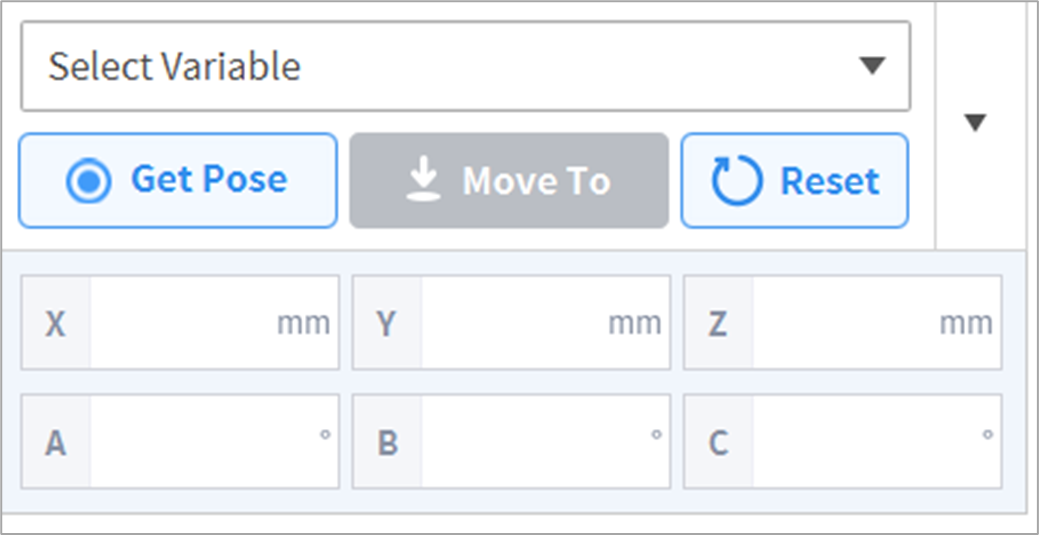
- Toccare il pulsante Save Pose (Salva posizione) per memorizzare la posizione dell'utensile robot.
- Se necessario, definire una variabile utilizzando GlobalVariables (Variabili globali) o il comando Define (Definisci).
- Se necessario, definire una variabile utilizzando GlobalVariables (Variabili globali) o il comando Define (Definisci).