Impostazione del controllo remoto
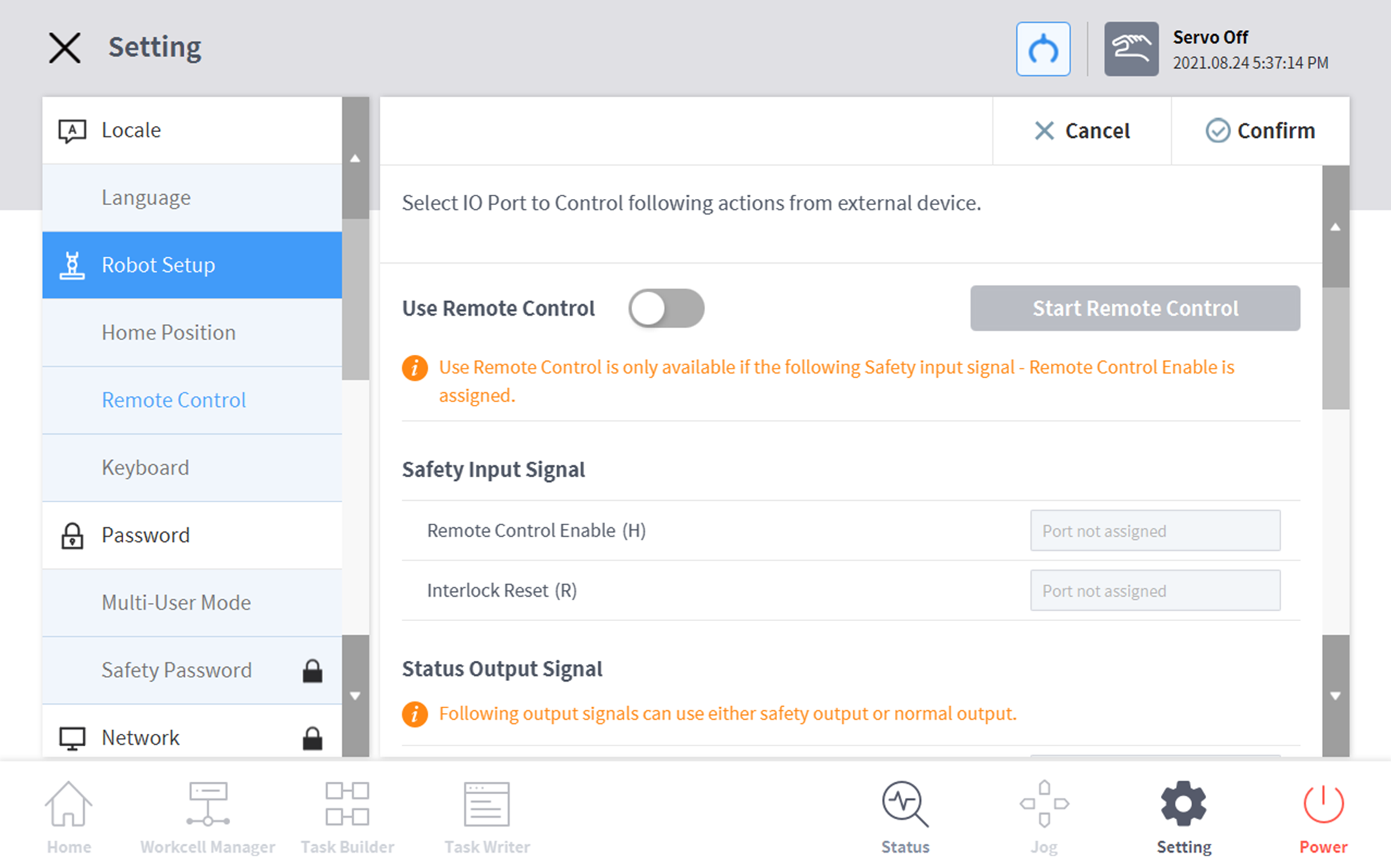
- Selezionare il Menu Controllo remoto nel Menu Impostazioni > Impostazioni robot
- Nella finestra gestione impostazioni vengono visualizzate informazioni relative alle attuali impostazioni.
- Impostare il pulsante Use Remote Control (Usa controllo remoto) su ON
- Se il sistema viene riavviato con il controllo remoto impostato su ON, si avvia in modalità di controllo remoto.
- Immettere i valori del segnale di uscita, del segnale di ingresso e dell'attività di importazione predefinita.
- Se il segnale di ingresso non viene impostato, risulta impossibile effettuare le impostazioni. Nella scheda Workcell Manager > I/O sicurezza> Ingresso, Modifica > Seleziona Porta > Configura Abilita controllo remoto(H).
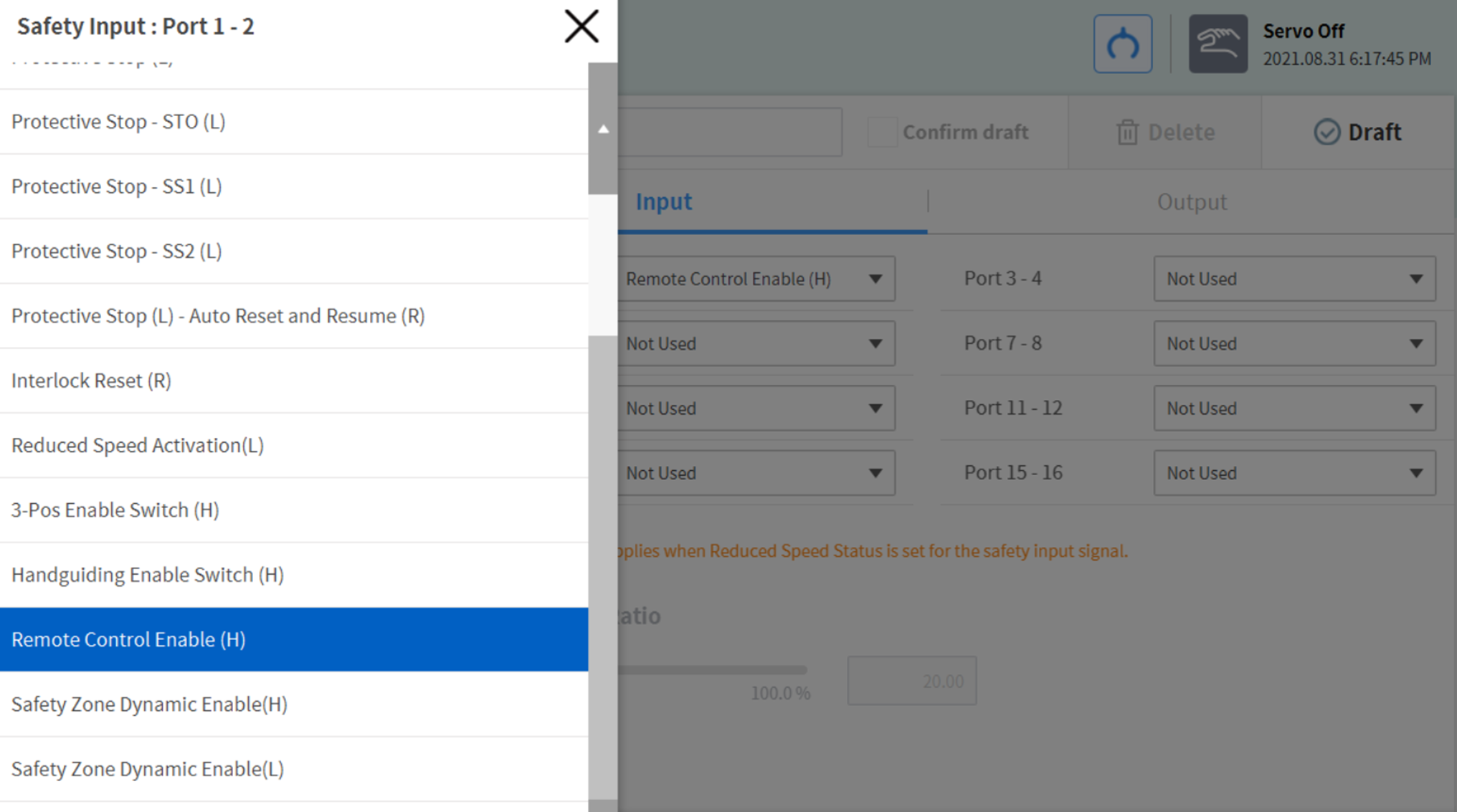
- Se il segnale di ingresso non viene impostato, risulta impossibile effettuare le impostazioni. Nella scheda Workcell Manager > I/O sicurezza> Ingresso, Modifica > Seleziona Porta > Configura Abilita controllo remoto(H).
- Al termine, toccare il pulsante Confirm.
- Questo completa le impostazioni ambiente per il controllo remoto.
- Per consentire il controllo remoto tramite un dispositivo esterno, toccare il pulsante Start Remote Control (Avvia controllo remoto) per attivare la modalità di controllo remoto.
- Vengono visualizzate informazioni sulle attività da eseguire da dispositivo esterno.
- Gli input di movimento dal dispositivo esterno possono essere eseguiti solo se sul pulsante “Enable Remote Control” (Abilita controllo remoto) viene visualizzato un segnale verde.
- Se sul pulsante Enable Remote Control (Abilita controllo remoto) viene visualizzato un segnale rosso, immettere un segnale di abilitazione dal dispositivo esterno.
Nota
- Nel caso in cui si verifichi un arresto di emergenza o di protezione in modalità controllo remoto, questo verrà gestito come segue:
- Arresto di emergenza: Si apre una finestra Arresto di emergenza. Dopo aver rimosso la causa dell'arresto di emergenza, tirare o ruotare il pulsante dell'arresto di emergenza per resettarlo, la finestra si chiude automaticamente.
- Arresto di protezione che causa il passaggio allo stato Servo Off: Si apre una finestra Arresto di protezione rossa. Se viene immesso il segnale Servo On dopo aver rimosso la causa dell'arresto di protezione, il servo del robot si attiva e la finestra si chiude automaticamente.
- Arresto di protezione che causa il passaggio allo stato Interrotto: Si apre una finestra Arresto di protezione gialla. Se viene immesso il segnale Reset sincronizzazione dopo aver rimosso la causa dell'arresto di protezione, lo stato del robot passa al normale stato di standby: Standby manuale, Standby automatico o Standby HGC.
Per le violazioni della sicurezza per le quali non è possibile rimuoverne la causa senza spostare il robot, è possibile utilizzare Rilascio afferraggio dal cockpit. - Per i dettagli sullo stato di ciascuna modalità, fare riferimento a " Stato e colore del LED Flangia in ciascuna modalità".
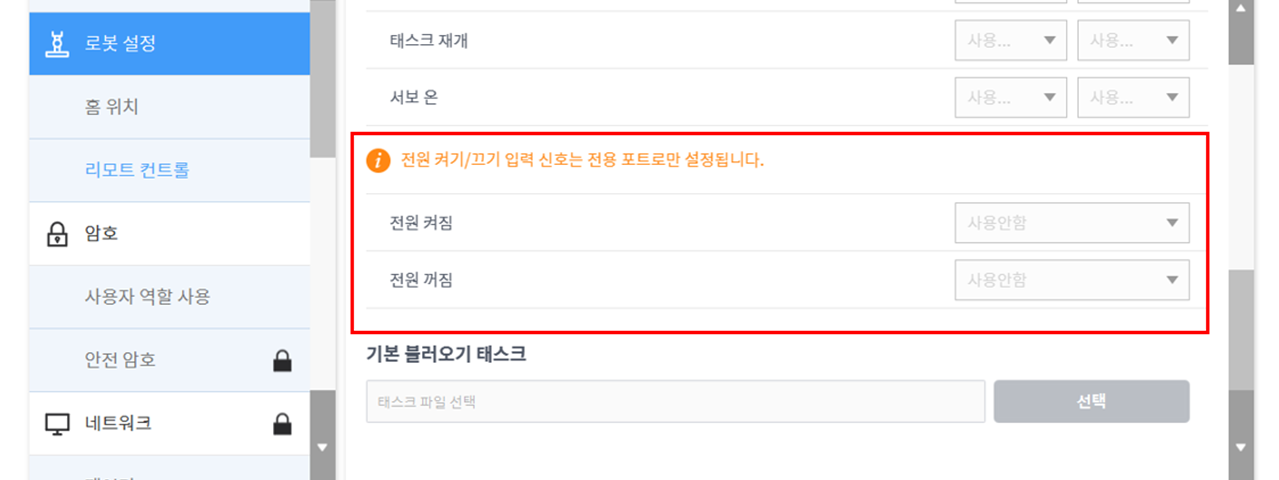
- È possibile attivare/disattivare (ON/OFF) l'alimentazione del robot mediante impostazione del sistema di controllo remoto.
- Toccare il pulsante Impostazioni nel Menu principale e selezionare Controllo remoto sotto Impostazioni robot.
- Selezionare la porta di ingresso riservata al controllo remoto per utilizzare le funzioni Accensione o Spegnimento.