
Fissaggio del robot
Inserire bulloni M8 nei quattro fori da 9,5 mm sulla base del manipulator per eseguirne il fissaggio.
- Si consiglia di utilizzare una coppia di serraggio di 20 Nm per serrare i bulloni. Utilizzare rondelle piane (elastiche) per prevenire l'allentamento causato dalle vibrazioni.
- Utilizzare un perno di riferimento da Φ5 per installare con precisione il robot nella posizione desiderata.
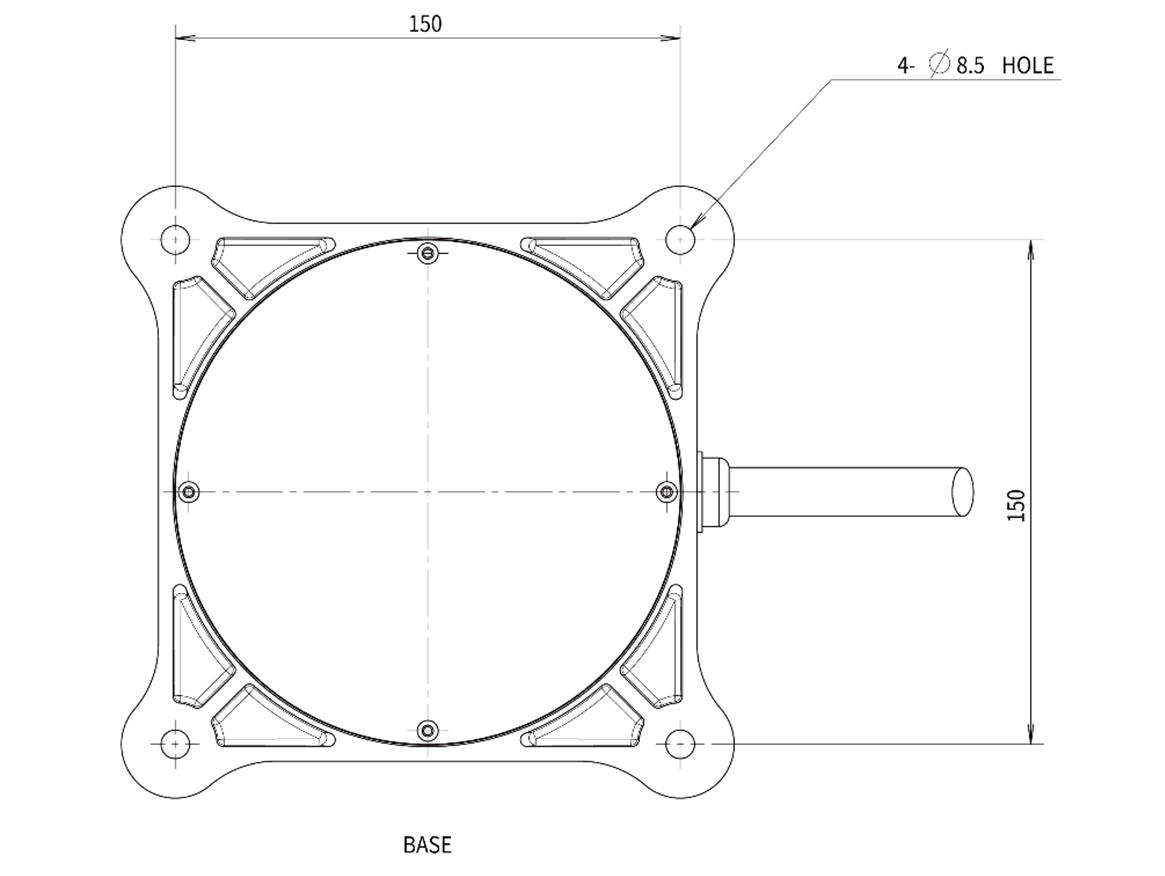
Disegno della base manipulator, utilizzare quattro bulloni M8. Unità [mm]
Avvertimento
- Serrare completamente i bulloni per evitare allentamenti durante il funzionamento del manipolatore.
- Sistemare la base del manipolatore su una superficie solida in grado di reggere il carico generato durante il funzionamento (10 volte la coppia massima e 5 volte il peso del robot).
- Il robot interpreterà le vibrazioni della base del manipolatore come una collisione e attiverà l'arresto di emergenza. Pertanto, nel caso di installazioni che prevedono lo spostamento automatico, non installare la base in un punto in cui sia soggetta ad accelerazioni elevate.
- Montare il manipolatore in un punto specifico utilizzando metodi appropriati. La superficie di montaggio deve essere solida.
- Il manipolatore potrebbe subire danni se entra in contatto con acqua per un periodo di tempo prolungato e, pertanto, evitare di utilizzarlo in ambiente umido o subacqueo.