
Esecuzione basata sul giunto
Per regolare l'angolazione in base al giunto del robot, procedere come indicato:
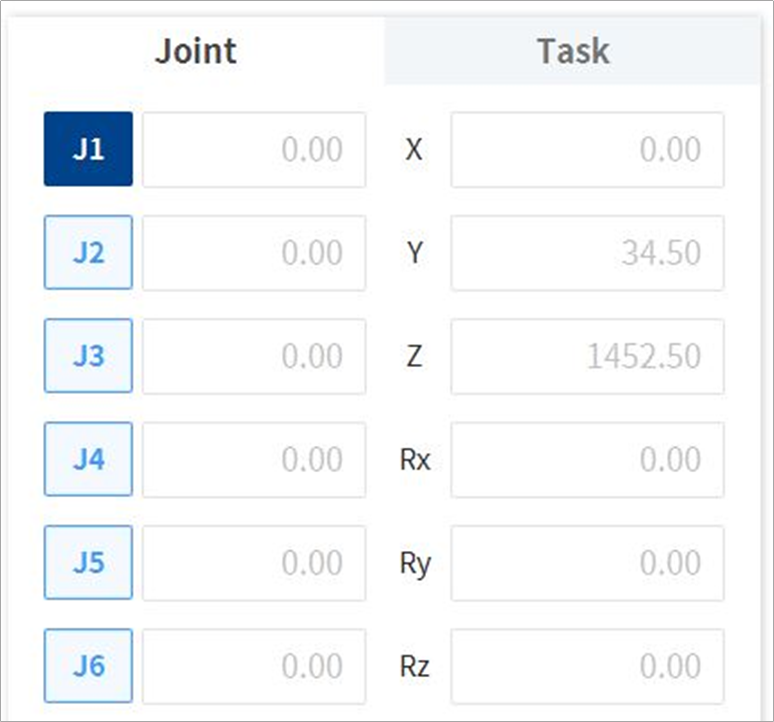
- Selezionare la scheda Joint e la schermata Joint.
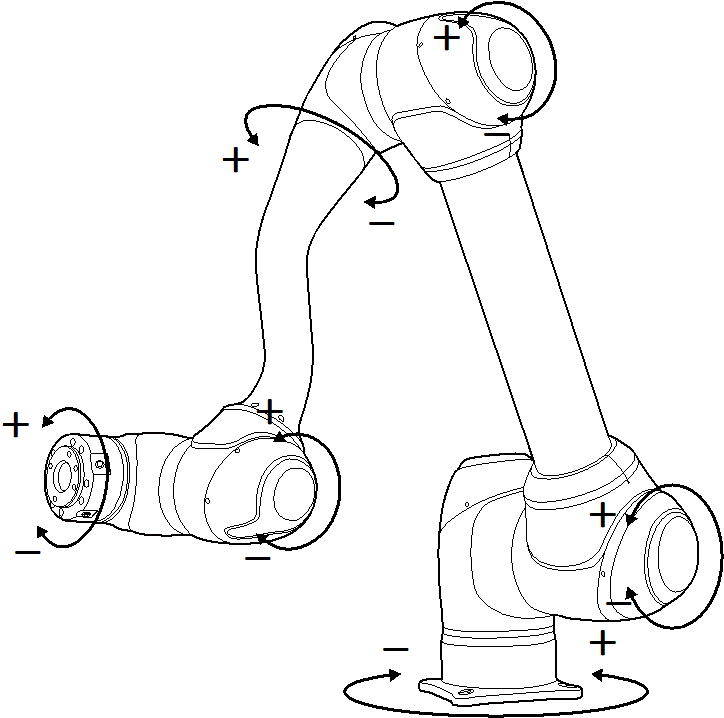
- Selezionare l'asse (J1-J6) per regolare l'angolazione.
- Premere senza rilasciare il pulsante di direzione (


Nota
Le aree di sicurezza non vengono applicate in modalità virtuale.