Comprensione dei principi base dei comandi Abilità
I comandi Abilità si basano su alcuni schemi di funzionamento.
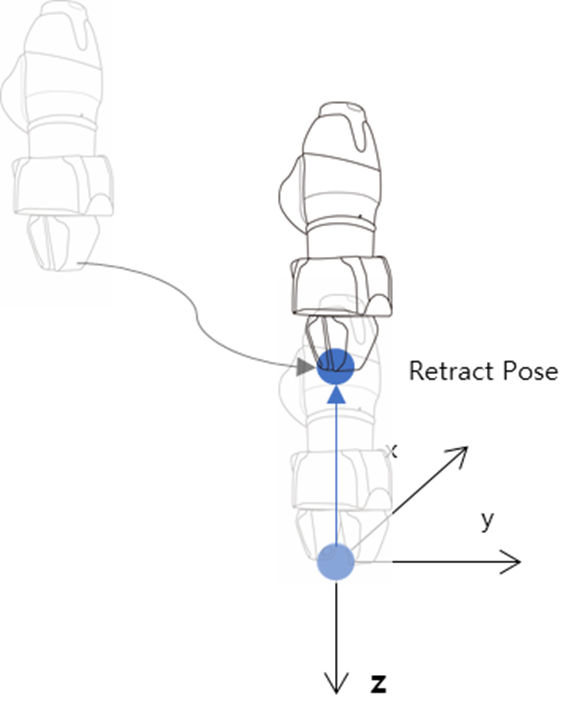
Per poter iniziare ad operare, il peso e il Tool Center Point (TCP) dell'utensile montato sul robot devono essere configurati e lo schema operativo base dei comandi abilità deve avere una posizione di approccio e una posizione di ritiro perpendicolari alla posizione di riferimento. .
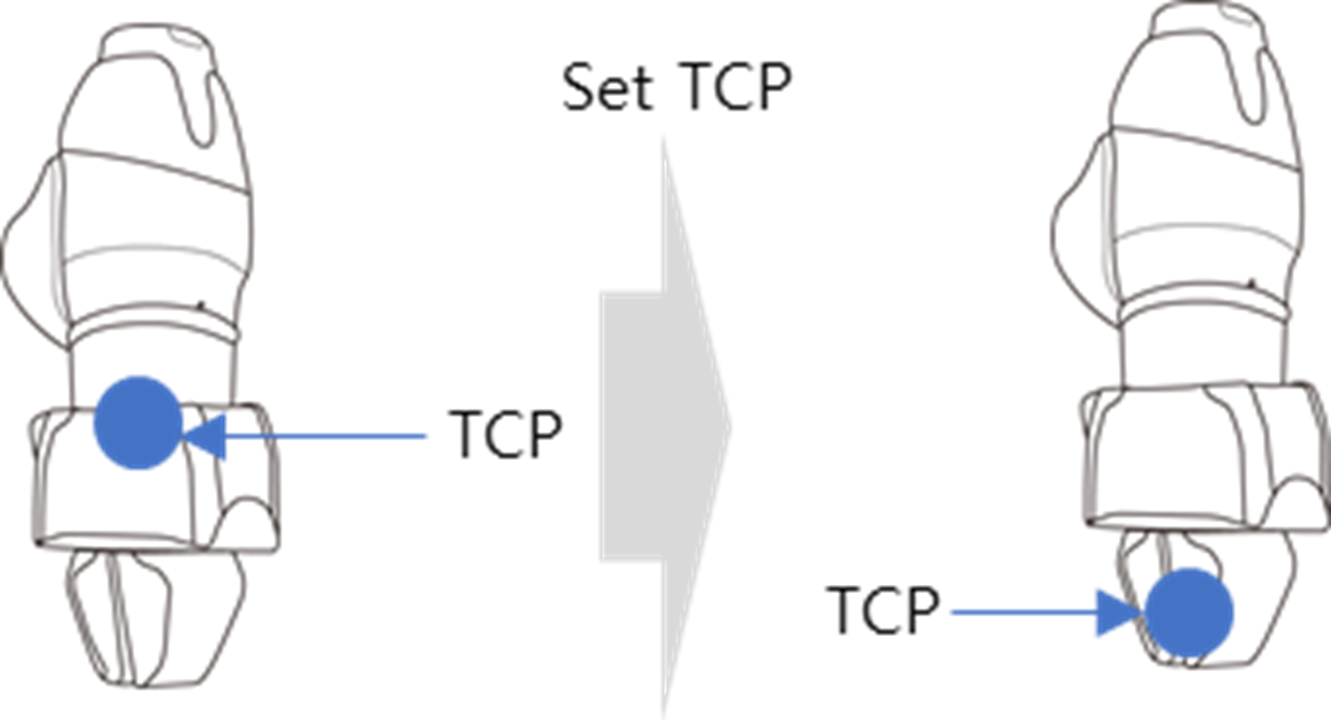
Impostazione TCP: L'utilizzo di un comando abilità End Effector (terminale) modifica automaticamente l'impostazione di offset del TCP. La fase di esecuzione del comando abilità End Effector (terminale) comprende l'impostazione di un offset idoneo per il TCP del terminale. Se l'offset del TCP varia, la funzione Blending Motion (Movimento di raccordo), che collega dolcemente il comando di movimento precedente, non può essere utilizzata.
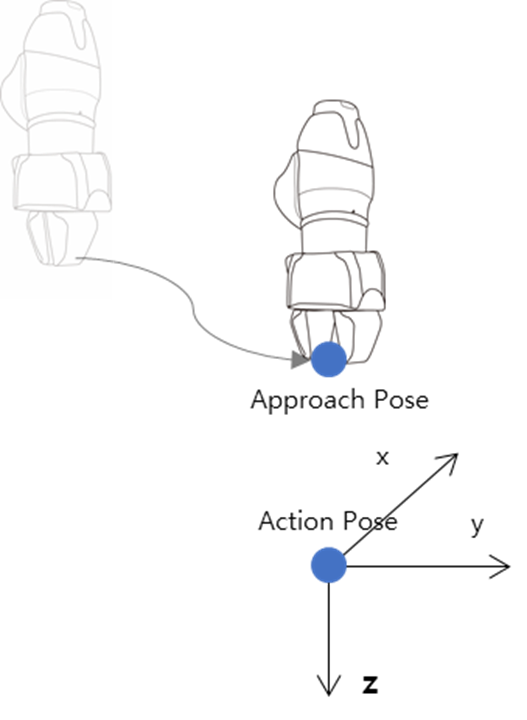
Movimento alla Posizione di Approccio: È un punto disponibile per il movimento alla Posizione di Approccio. È impostata nella direzione Z dalla Posizione di Approccio, ma è anche possibile selezionare una direzione diversa. La Distanza di Approccio inserita viene calcolata automaticamente per la Posizione di Azione e il robot si sposta nel punto corrispondente.
Movimento alla Posizione di riferimento: È il punto sul pezzo in lavorazione in cui il terminale esegue la lavorazione. Per impostare coordinate precise oltre alla velocità e all'accelerazione per la 
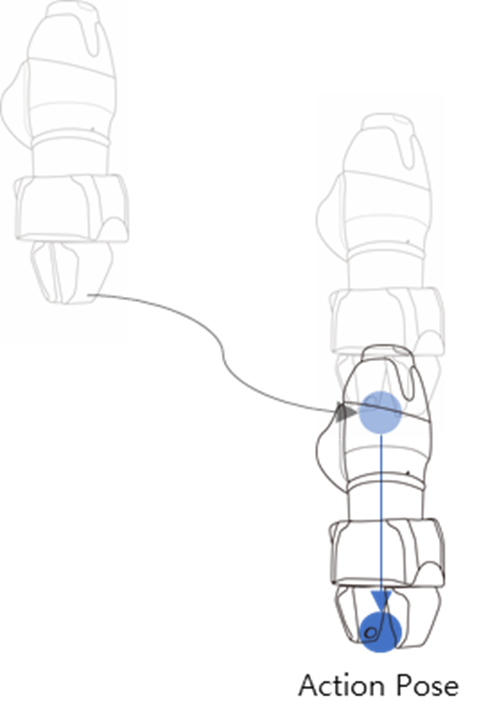
Movimento alla Posizione di Ritiro: È il punto utilizzato per il prelievo di un pezzo da lavorare e lo spostamento in sicurezza in un altro punto. È la direzione Z dalla Posizione di Approccio, ma è anche possibile selezionare una direzione diversa. La Distanza di Ritiro inserita viene calcolata automaticamente per la Posizione di Azione e il robot si sposta nel punto corrispondente.
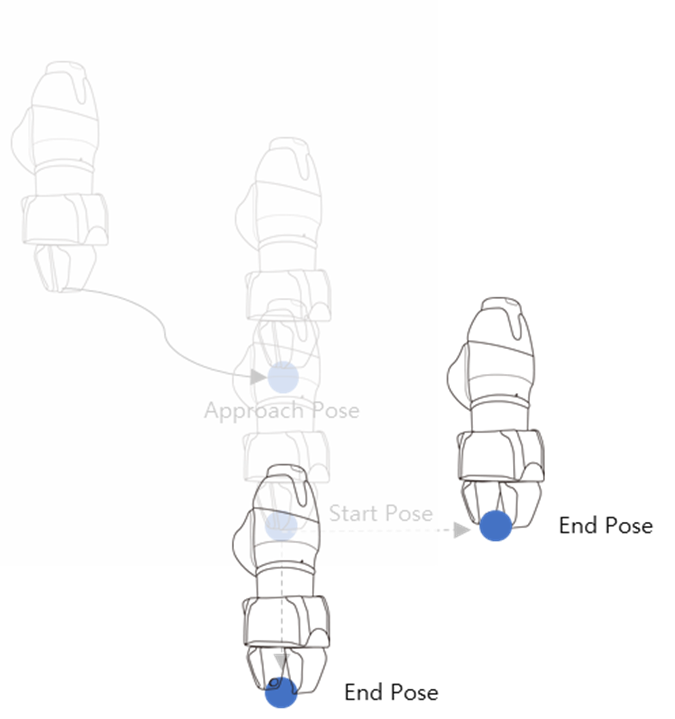
Movimento alla Posizione iniziale: Se il movimento del terminale non termina con un singolo movimento, è possibile che vi siano un punto intermedio e uno finale e la Posizione di inizio azione è il punto in cui il lavoro ha inizio. (cioè, Abilità ApriChiudi_Sportello - Posizione iniziale)
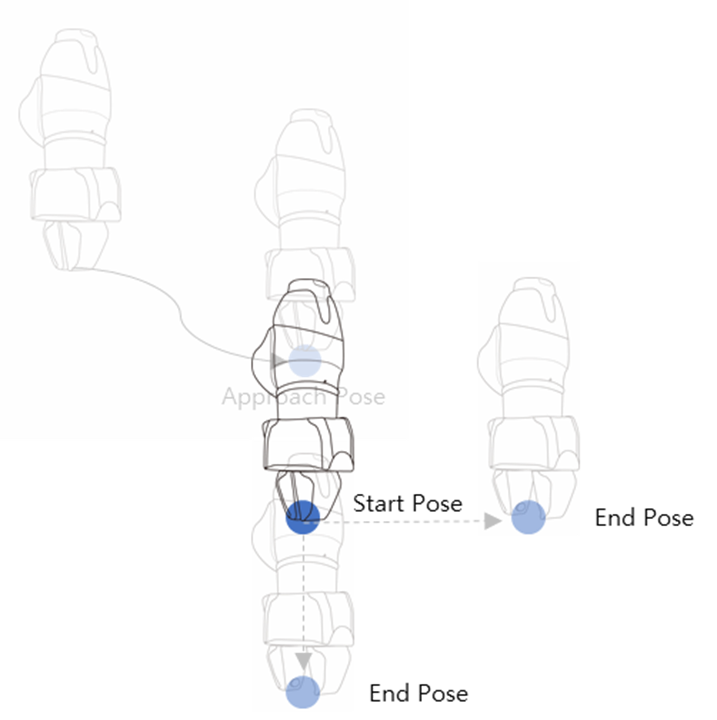
Movimento alla Posizione finale: Se il movimento del terminale non termina con un singolo movimento, è possibile che vi siano un punto intermedio e uno finale e la Posizione di fine azione è il punto in cui il lavoro ha fine. (cioè, Abilità ApriChiudi_Sportello - Posizione finale)