
Compliance Control (Controllo compliance) e Contact Sensing (Verifica contatto)
Con le funzioni Compliance Control (Controllo compliance) e Contact Sensing (Verifica contatto), l’esclusiva tecnologia di controllo della forza di Doosan Robotics, è possibile eseguire facilmente l'apprendimento senza operazioni ripetute per la definizione precisa del punto, poiché consente, durante il funzionamento del robot, una deviazione dalla posizione tra il pezzo in lavorazione e gli oggetti circostanti compresa in un determinato campo di valori consentiti.
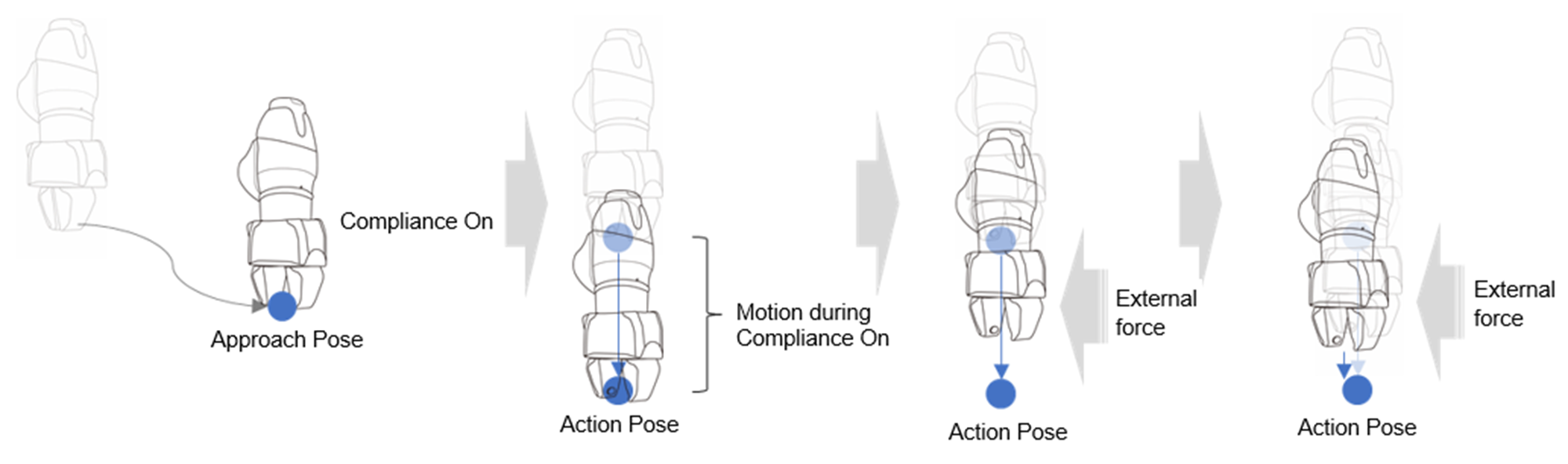
Compliance Control (Controllo di conformità): Se durante l'Approccio, à l'Azione à e il Ritiro viene applicata una forza, consente la deviazione rispetto alla posizione impostata con una certa tolleranza, come una molla.
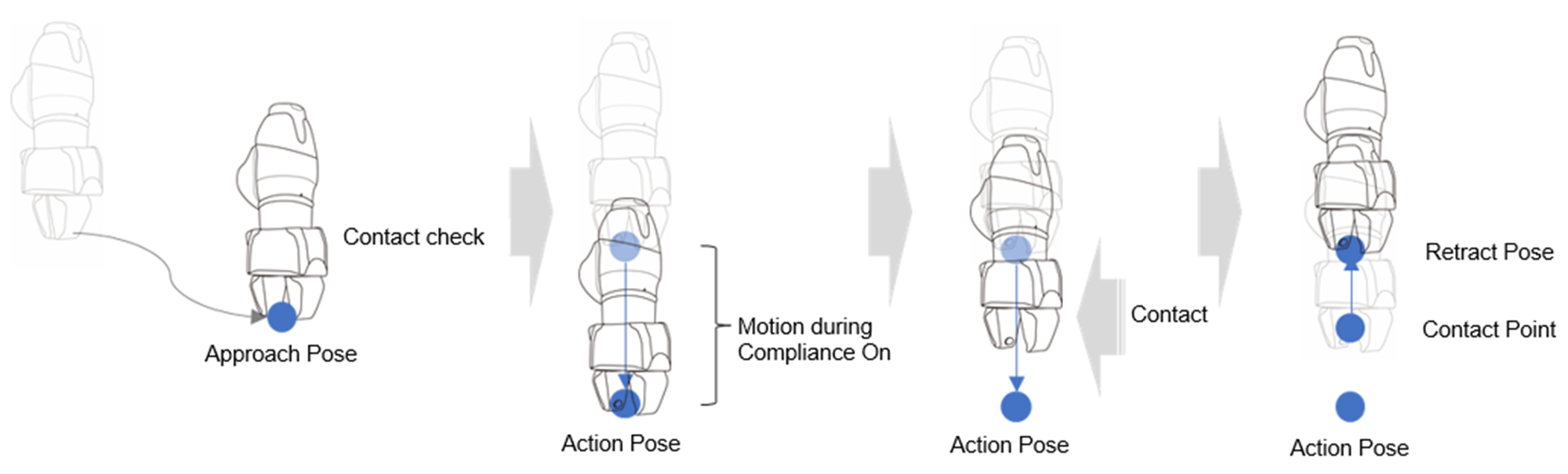
Contact Check (Verifica contatto): Basata sui valori inseriti per Contact Force (Forza di contatto) e Contact Determination Range (Range determinazione contatto), la funzione rileva il contatto con l'oggetto, arresta il robot nella posizione corrispondente e attiva la pinza per afferrare l'oggetto.
- Questa funzione deve essere utilizzata con la funzione Compliance Control. Se la Force (Forza) è inserita e il Compliance Control non è abilitato, si verifica un errore.
- Contact Check (Verifica contatto) è una funzione che rileva il contatto con una forza esterna, pertanto la sensibilità della Collision Detection (Rilevamento collisione) deve essete impostata su livelli bassi, o disabilitata.
- Prestare attenzione quando si utilizza questa funzione, dal momento che è possibile generare una forza eccessiva quando si entra in contatto con l'ambiente esterno se il valore opzionale rigidezza (cioè, direzione z) della funzione Compliance Control è eccessivo o la velocità di lavorazione è troppo elevata. (È necessario apportare modifiche in base alla situazione riducendo il valore della rigidezza se la velocità di lavoro è eccessiva o aumentarla se tale velocità è troppo bassa.)
Nota
- Se FTS non è installata in caso di utilizzo della Serie A, la funzione Rilevamento contatto non è disponibile. In questo caso, l'uso del controllo di conformità è limitato e la rigidezza può essere modificata solo nella direzione di traslazione (X, Y, Z)..