Avvio del sistema
Dopo aver acceso il sistema, ha inizio la fase di avvio. Completato l'avvio, l'applicazione di sistema viene visualizzata sulla console portatile. Per maggiori informazioni sull'applicazione di sistema, vedere “Configurazione della schermata del programma”
Nota
- Servo On: Per modificare la posizione del robot, il robot deve trovarsi nello stato Servo On in cui i i giunti del robot sono alimentati e quest'ultimo è in standby. Per maggiori informazioni su Servo On, vedere “Servo On”
- Impostazione di data e ora: Poiché la data e l'ora visualizzate sulla Teach pendant (console portatile) e il messaggio di registro memorizzati sul robot seguono l'impostazione di data e ora del sistema, la data e l'ora devono essere configurate al primo avvio. Per informazioni sulla modalità di configurazione della data e dell'ora, vedere " Impostazione di data e ora"
- L'utilizzo della DART Platform consente il controllo del robot senza l'uso della Teach pendant (console portatile).
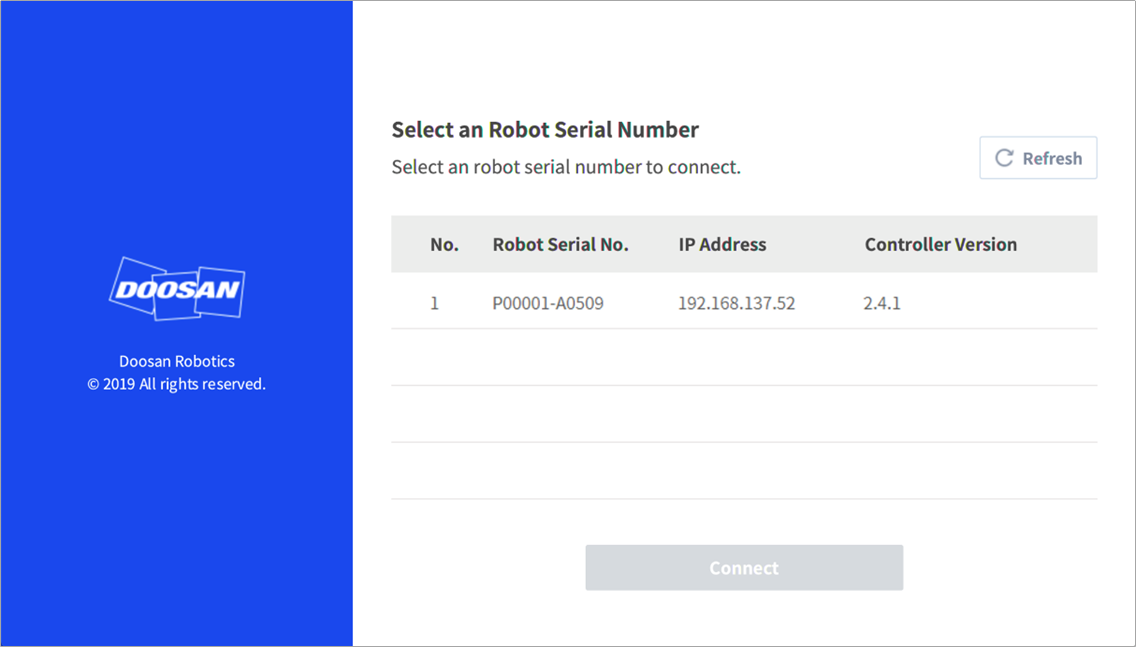
- La DART Platform visualizza una schermata che mostra il robot collegato alla rete dovo l'avvio e il processo di verifica del numero di serie del robot oltre alla connessione di quest'ultimo.