
Robot Installation Pose Setting (Impostazione della posizione di installazione del robot)
Il robot può essere installato con qualsiasi angolazione. Per configurare la posizione di installazione del robot, toccare il 
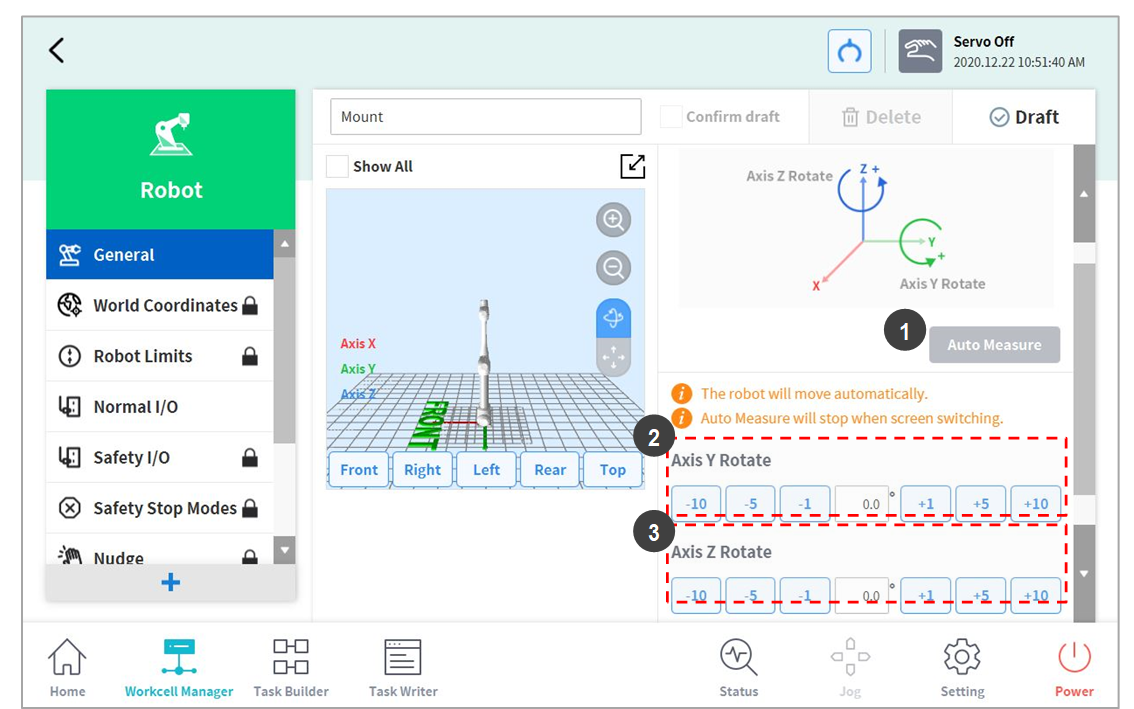
N. | Voce | Descrizione |
|---|---|---|
1 | Auto Calculate | Calcola automaticamente l'angolo di installazione del robot. |
2 | Y-axis Rotation Setting | Immette l'angolo dell'asse Y del robot durante l'installazione. |
3 | Z-axis Rotation Setting | Immette l'angolo dell'asse Z del robot durante l'installazione. |
Nota
Toccare il pulsante Auto Calculate per calcolare automaticamente il valore dell'inclinazione. La funzione Auto Calculate (Calcolo automatico) della posizione di installazione può essere utilizzata quando la base del robot è inclinata rispetto al terreno di più di 5 gradi. La funzione Auto Calculate (Calcolo automatico) della posizione di installazione del robot consente la facile configurazione della posizione di installazione richiesta dalle funzioni apprendimento diretto, controllo delle forze e controllo di conformità senza richiedere l'inserimento di valori precisi degli angoli di installazione, ma la precisione della posizione assoluta della posizione del robot calcolata automaticamente può essere minore di quella data da valori misurati con precisione.
Attenzione
I modelli Serie H non supportano le funzioni di posizionamento durante l'installazione del robot. L'installazione deve avvenire sul terreno.