Impostazioni della Zona riduzione della sensibilità alle collisioni
Per impostare la Zona riduzione della sensibilità alle collisioni, toccare il pulsante 
- Immettere il nome della Workcell nel campo relativo nella parte superiore della schermata riferita alle Impostazioni della Workcell.
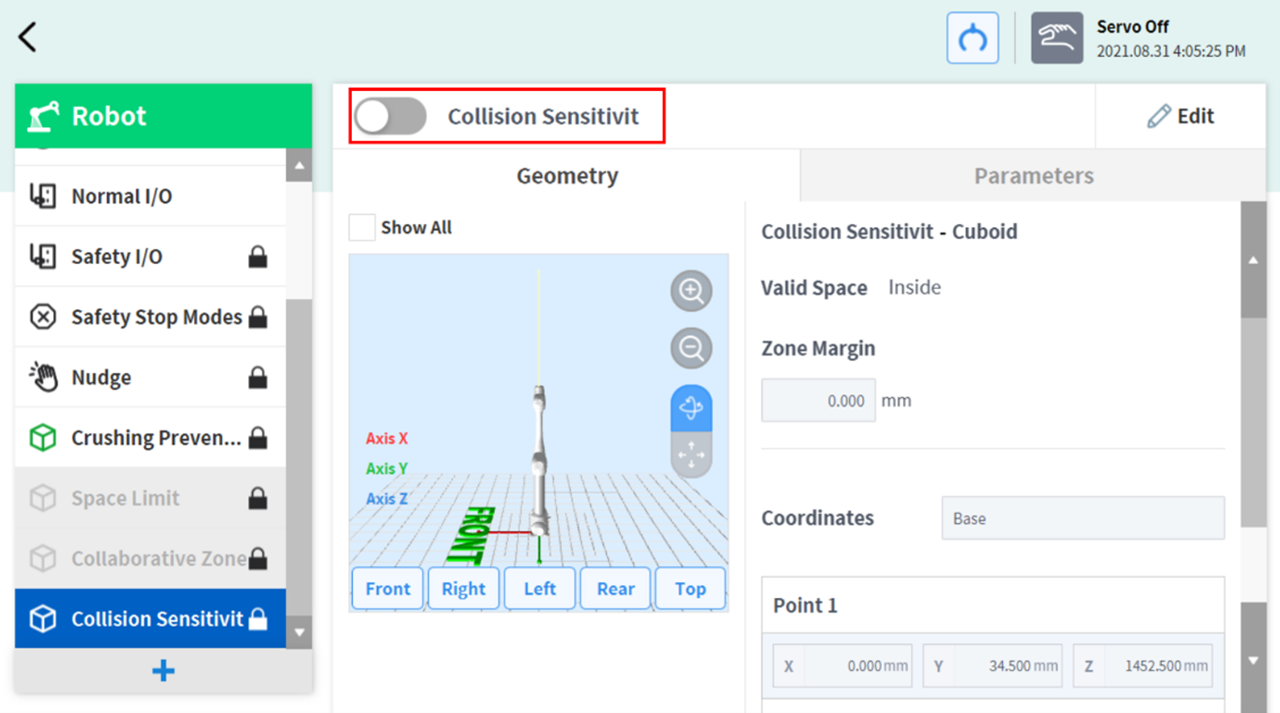
- Impostare i dati sulla posizione in base a Forma zona insieme a Spazio valido e Margine zona nella scheda Geometria.
Impostare l'opzione esclusione, Limiti TCP/Robot e Abilita zona dinamica nella scheda Parametri e premere Bozza.
Avvertenza
- La Zona riduzione della sensibilità alle collisioni è una Zona ad alta priorità.
- Le Zone ad alta priorità hanno la priorità sulle altre Zone e sull'impostazione dei Limiti del robot Nel caso di più Zone ad alta priorità sovrapposte, la funzione di sicurezza utilizza il limite di sicurezza MENO restrittivo. Per questi motivi, le dimensioni della Zona ad alta priorità devono essere specificate come le più piccole possibili, per sicurezza
- Verificare che tutti i parametri visualizzati siano quelli desiderati, quindi spuntare Conferma bozza e premere Conferma
- Premere il pulsante "toggle" di attivazione per applicare la Zona riduzione della sensibilità alle collisioni.