
Collegamento I/O centralina di comando
Oltre al manipolatore e alla console portatile, è possibile collegare alla centralina di comando tramite il relativo terminale I/O svariate apparecchiature esterne. È possibile collegare diverse periferiche come dispositivi di sicurezza, tra cui l'interruttore d'arresto di emergenza, la barriera fotoelettrica e i tappetini di sicurezza e i dispositivi richiesti durante la configurazione della cella di lavoro del robot tra cui elettrovalvole pneumatiche, relè, PLC ed encoder dei convogliatori.
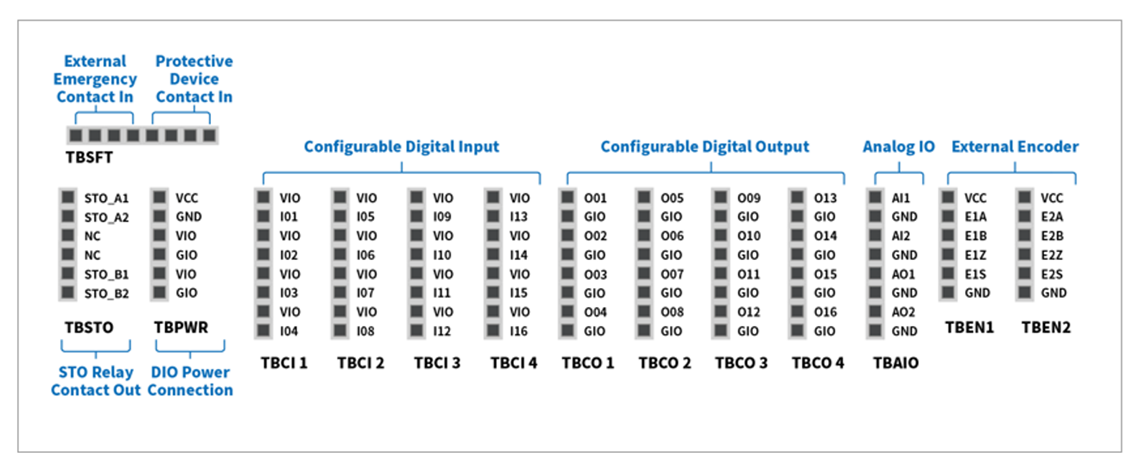
La I/O della centralina di comando è costituita dalle seguenti sei unità:
- Morsettiera per contatto d'ingresso di Safety (TBSFT): Utilizzata per collegare i dispositivi richiesti per l'arresto di emergenza e l'arresto per protezione
- Morsettiera per alimentazione I/O digitale (TBPWR):
- Blocco I/O digitale Configurable (TBCI1- 4, TBCO1– 4): Utilizzato per collegare le periferiche richieste per il funzionamento del robot
- Morsettiera per I/O analogica (TBAIO):
- Morsettiera per ingresso encoder (TBEN1, TBEN2)
- Morsettiera per contatto di uscita di Safety (TBSTO): Collega alla linea di alimentazione delle periferiche del robot in modo che quando il robot entra in modalità STO, anche l'alimentazione alle periferiche venga interrotta
Attenzione
- Disinserire l'alimentazione elettrica quando si collegano i terminali alla I/O della centralina di comando per evitare danni al prodotto e avarie.
- Doosan Robotics non indennizza i danni al prodotto causati da collegamenti impropri o negligenza dell'utilizzatore.
- Verificare di aver disinserito l'alimentazione elettrica esterna quando si spegne la centralina di comando.