
Schermata modalità reale: Scheda dati terminale
La schermata della modalità reale (scheda dati terminale) del Task Builder è configurata come segue:
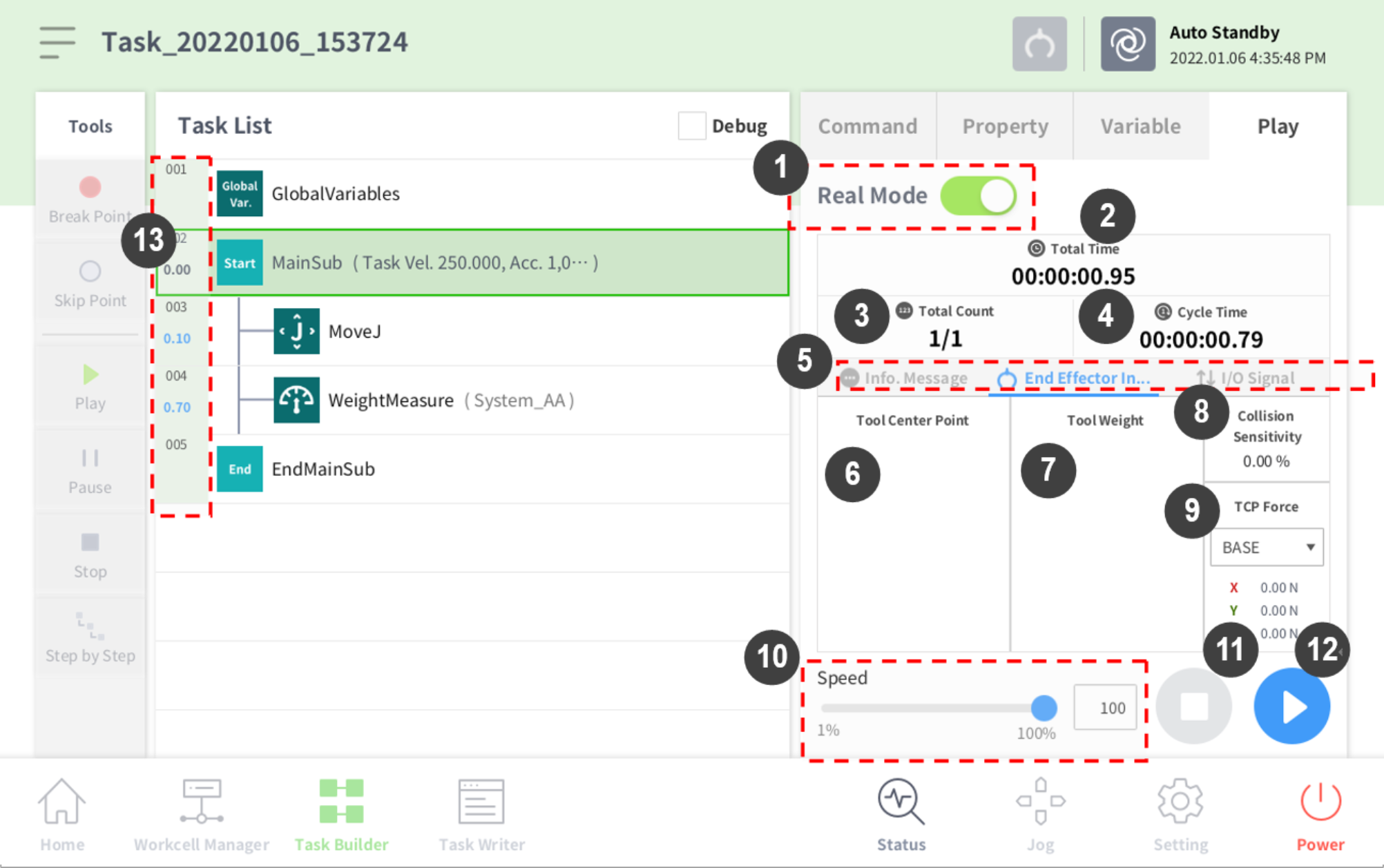
N. | Voce | Descrizione |
1 | Real Mode ( | Imposta la modalità di esecuzione del test del robot.
|
2 | Total time | Visualizza il tempo totale trascorso dall'esecuzione dell'attività. |
3 | Total count | Visualizza il numero totale di volte che l'attività è stata eseguita. |
4 | Average execution time | Visualizza il tempo medio trascorso nell'esecuzione di un ciclo dell'attività presa dalla lista. |
5 | Information Screen Shift Tab | È possibile alternare tra la schermata dei Informazione Messaggio del robot, la schermata delle informazioni sull'effettore finale e la schermata delle informazioni di input/output.
|
6 | Tool center point information area | Visualizza i dati relativi al tool center point configurati attraverso il tool center point e le funzioni di configurazione del peso del comando TCP impostato o del jog. |
7 | Tool weight information | Visualizza i dati relativi al peso dell'utensile configurati attraverso il tool center point e le funzioni di configurazione del peso del comando TCP impostato o del jog. |
8 | Collision information area | Visualizza il valore di sensibilità alle collisioni impostato per l'area nella quale il robot è attualmente posizionato. |
9 | Force information area | Visualizza i dati sulla forza nei sistemi di coordinate Base, Mondo, Utente e Riferimento. Il sistema di coordinate di riferimento visualizza la forza in base ai dati nel sistema di coordinate applicato al robot. |
10 | Speed slider | Imposta la velocità del robot in modalità reale o virtuale. |
11 | Stop button | Interrompe l'attività in corso. |
12 | Execute/pause toggle button | Esegue o mette in pausa l'attività presa dall'elenco. |
13 | Time | Visualizza il tempo trascorso nell'esecuzione del comando/abilità corrispondente. |

Attenzione