
Presentazione del prodotto (CS-01P)
Denominazioni e funzioni
Centralina di comando metallica IP (CS-01P)
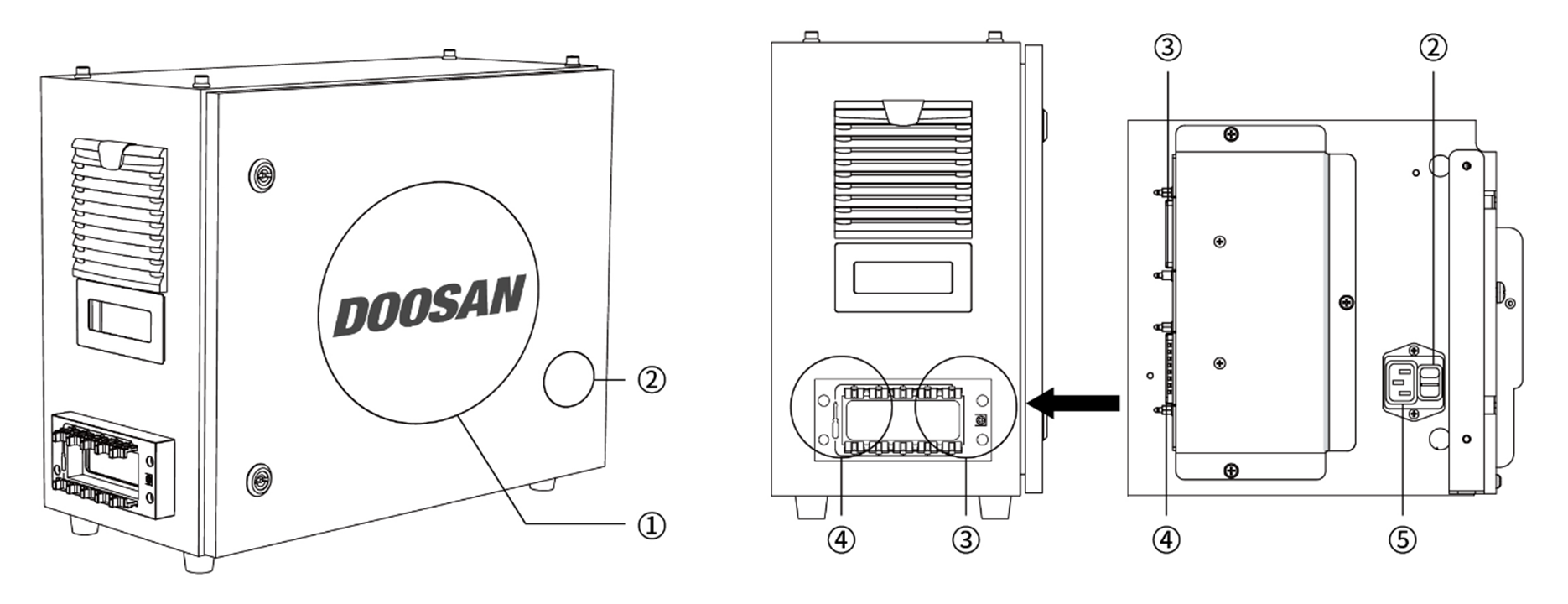
N. | Voce | Descrizione |
1 | I/O connection terminal (internal) | Utilizzato per collegare la centralina di comando o le periferiche. |
2 | Interruttore di alimentazione | Utilizzato per attivare/disattivare (ON/OFF) l'alimentazione di rete alla centralina di comando. |
3 | Teach pendant cable connection terminal | Utilizzato per collegare il cavo della Teach pendant (console portatile) alla centralina di comando. |
4 | Robot cable connection terminal | Utilizzato per collegare il cavo del robot alla centralina di comando. |
5 | Power connection terminal | Utilizzato per collegare l'alimentazione della centralina di comando. |
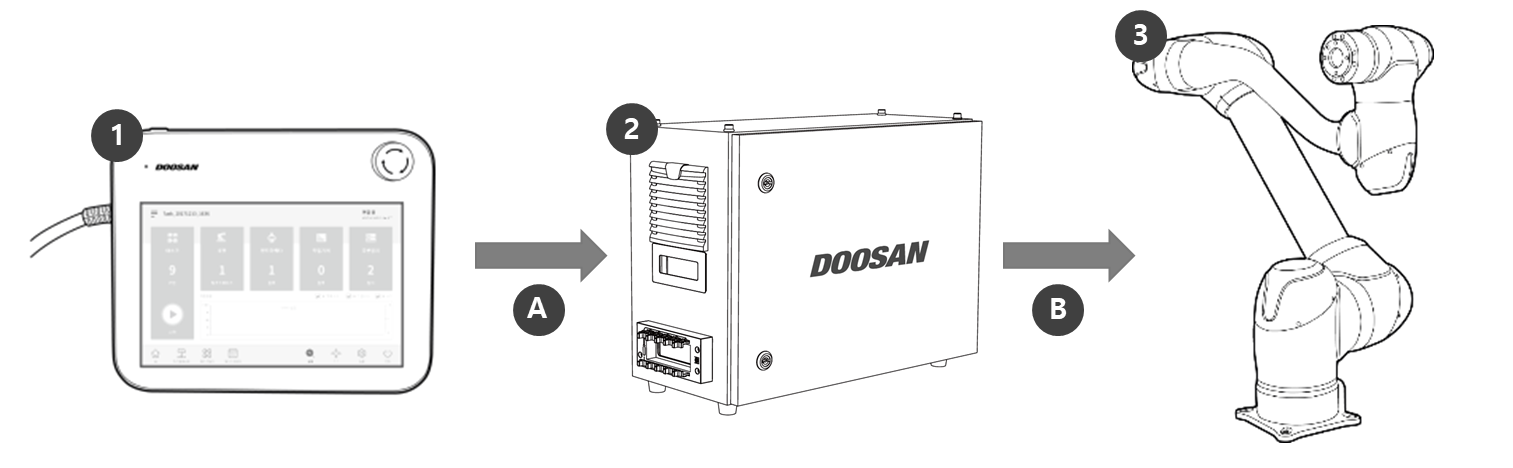
Configurazione di sistema
N. | Voce | Descrizione |
|---|---|---|
1 | Console portatile | Dispositivo che gestisce il sistema nel suo complesso, è in grado di di far apprendere al robot determinate posizioni e consente di configurare le impostazioni relative al manipolatore e alla centralina di comando. |
2 | Centralina di comando | Controlla i movimenti del robot secondo la posizione o il movimento impostato tramite la console portatile. Presenta diverse porte I/O che consentono il collegamento di varie apparecchiature e dispositivi |
3 | Manipolatore | È un robot collaborativo di tipo industriale in grado di svolgere operazioni di trasporto o assemblaggio per mezzo di svariati utensili |
A | Comando/ | |
B | Alimentazione/ |
Targhetta ed etichetta
