Comprendere la conformità/il controllo della forza
OPZIONALE DIFFICILE 20 MIN
Il controllo della forza e il controllo della conformità sono funzioni che controllano la forza del robot. Queste funzioni controllano anche l'esecuzione del movimento e del controllo della forza se viene aggiunto un comando di movimento. Il controllo della conformità e il controllo della forza presentano le seguenti differenze:
- Controllo della conformità
- Il robot è conforme alla forza esterna sul TCP di estremità del robot durante il controllo di conformità e, quando la forza esterna viene rimossa, viene creata una forza che riporta il robot nella posizione originale, causando il movimento del robot nella posizione corrispondente.
- Può essere utilizzato quando è necessario un movimento lineare su una superficie irregolare senza danneggiare il robot e la superficie. Può essere utilizzato per evitare collisioni impreviste attorno al pezzo.
- Controllo della forza
- Durante il controllo della forza, la forza viene generata sul TCP di estremità del robot. L'accelerazione viene generata nella direzione in cui viene generata la forza, quindi il robot si sposta contemporaneamente verso la direzione di movimento e la direzione della forza.
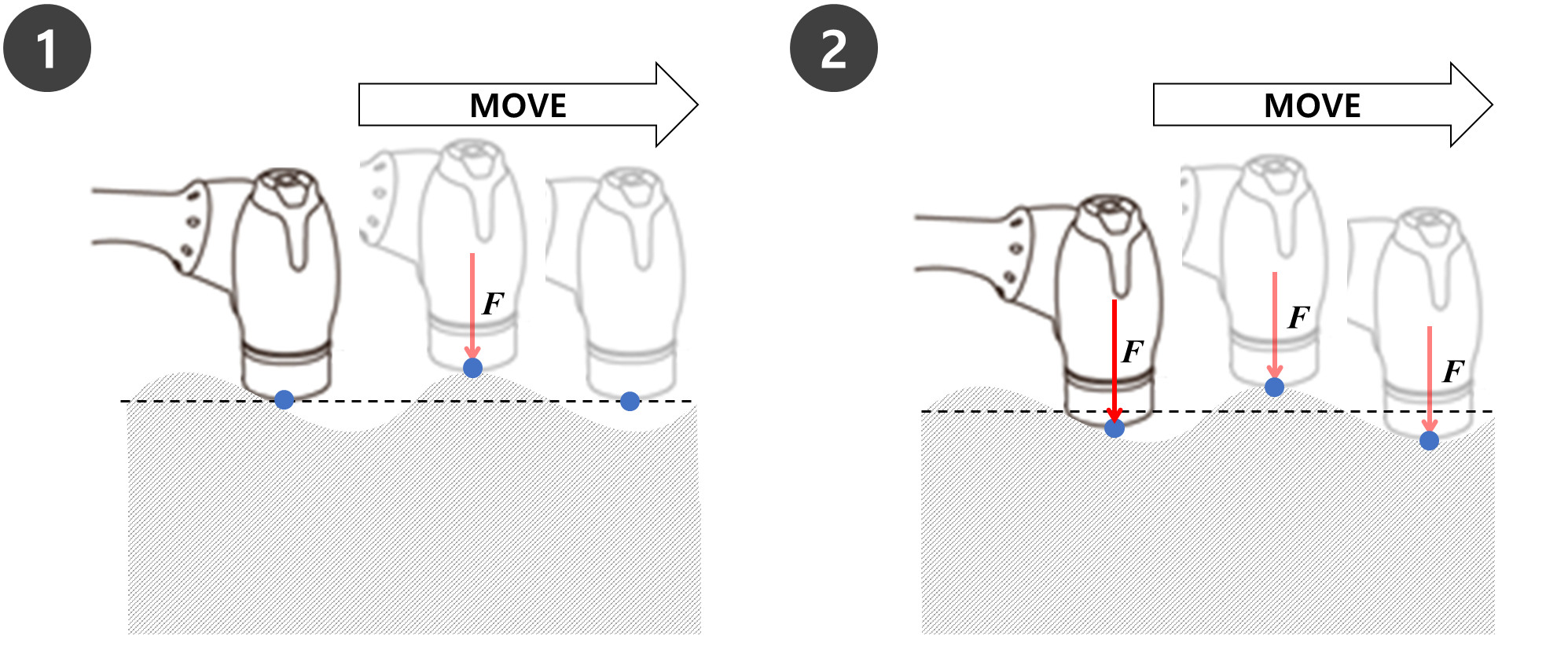
- Quando si effettua il contatto con un oggetto, la forza viene applicata sull'oggetto fino a quando la forza impostata e la forza di repulsione dell'oggetto non formano un equilibrio.
- Può essere utilizzato quando è necessario applicare una forza uguale su un movimento lineare su una superficie irregolare. Può essere utilizzato in attività che richiedono una forza costante durante il movimento, come la lucidatura.
Nota
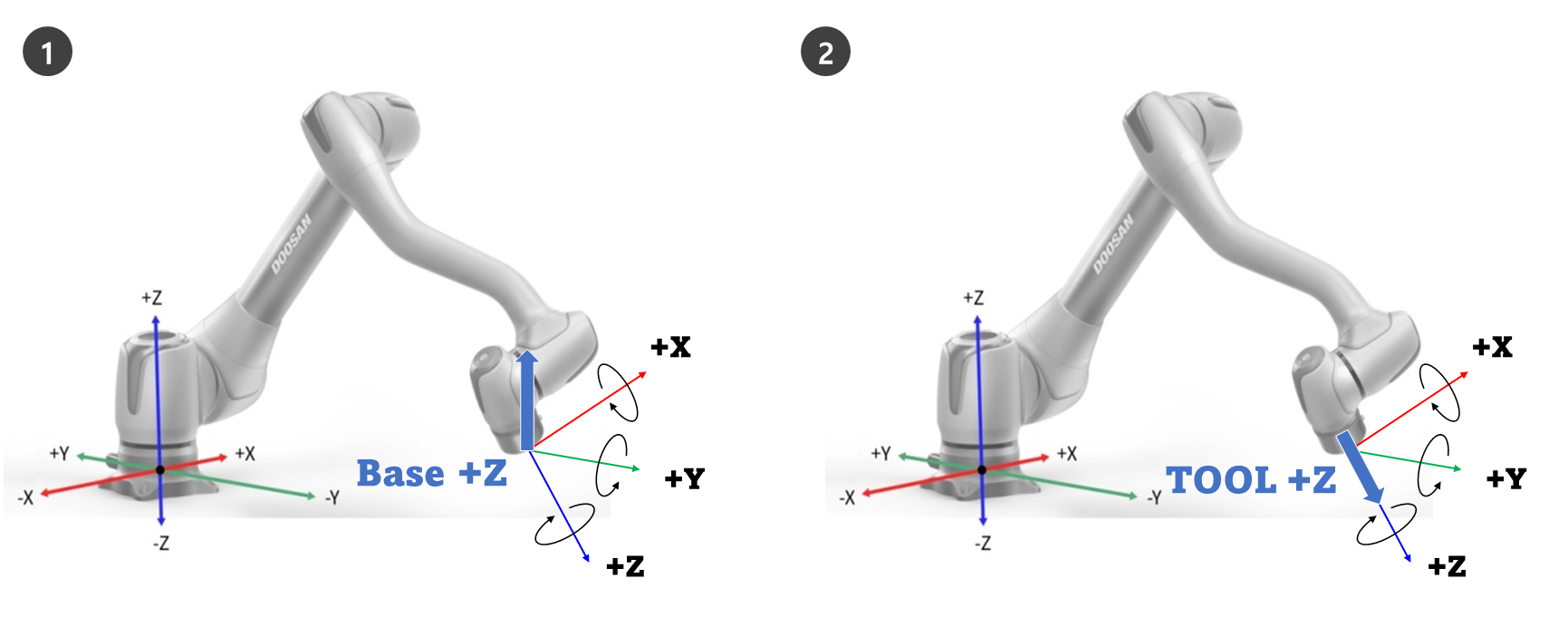
I comandi di conformità e forza vengono eseguiti in base alle coordinate correnti. La coordinata predefinita di un'attività è le coordinate base e le coordinate possono essere modificate con il comando Imposta.
- Fig. 1 è la direzione di funzionamento quando il controllo di forza/compliance nella direzione +Z è applicato sulle coordinate di base.
- Fig. 2 è la direzione di funzionamento quando il controllo di forza/compliance nella direzione +Z è applicato sulle coordinate utensile.
Controllo di conformità

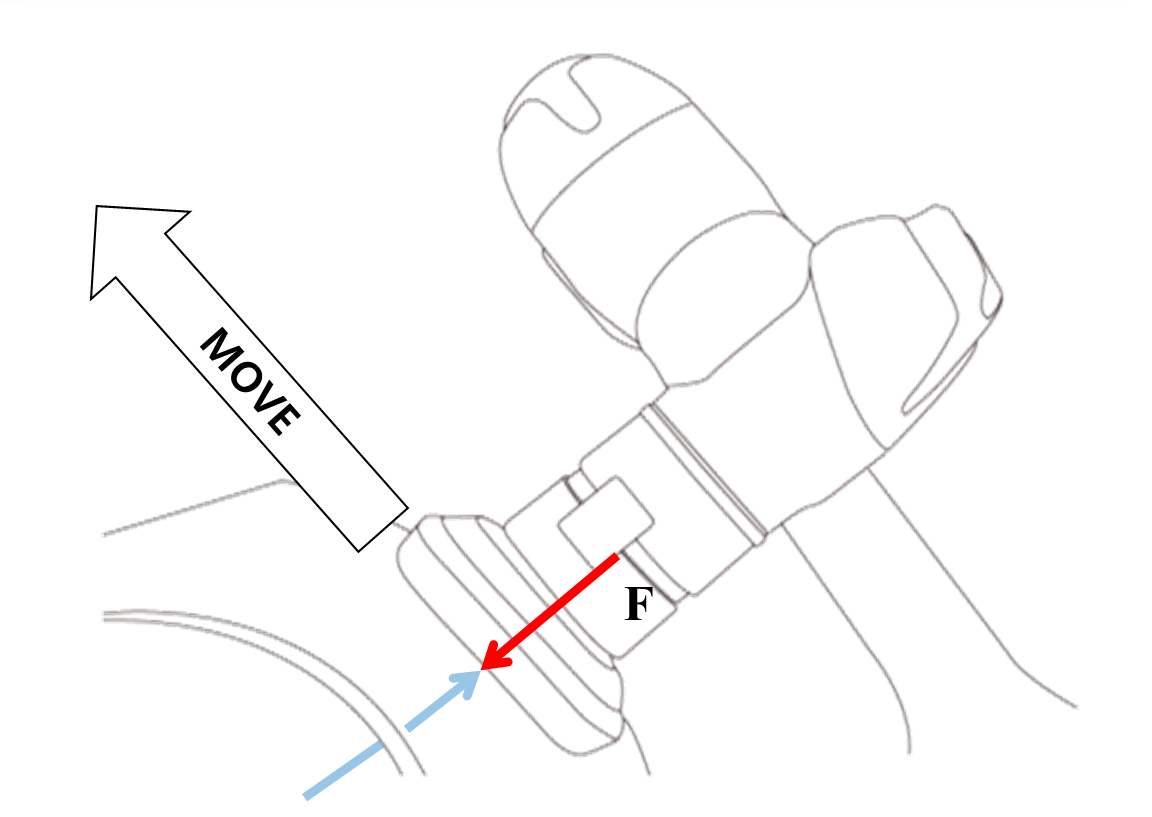
Il controllo di conformità è la funzione che soddisfa la forza esterna in base alla rigidità impostata quando la forza viene applicata sul TCP di estremità del robot. Bilancia le forze nel punto di destinazione ed è un metodo di controllo che genera una forza di repulsione se lo spostamento avviene lontano dal punto di bilanciamento. Durante il controllo di conformità, l'estremità del robot rimbalza come una molla.
- Se si verifica una collisione quando si utilizza il controllo del movimento da solo, è possibile che l'oggetto in collisione possa danneggiarsi.
- I robot Doosan Robotics si arrestano in modo sicuro quando si verifica una collisione, ma a seconda delle impostazioni dell'utente, ad esempiolimiti di sicurezza > sensibilità collisione, possono verificarsi le seguenti situazioni.
- Se il controllo di conformità è impostato su ON durante il controllo del movimento, il robot si sposta rispettando l'oggetto in collisione.
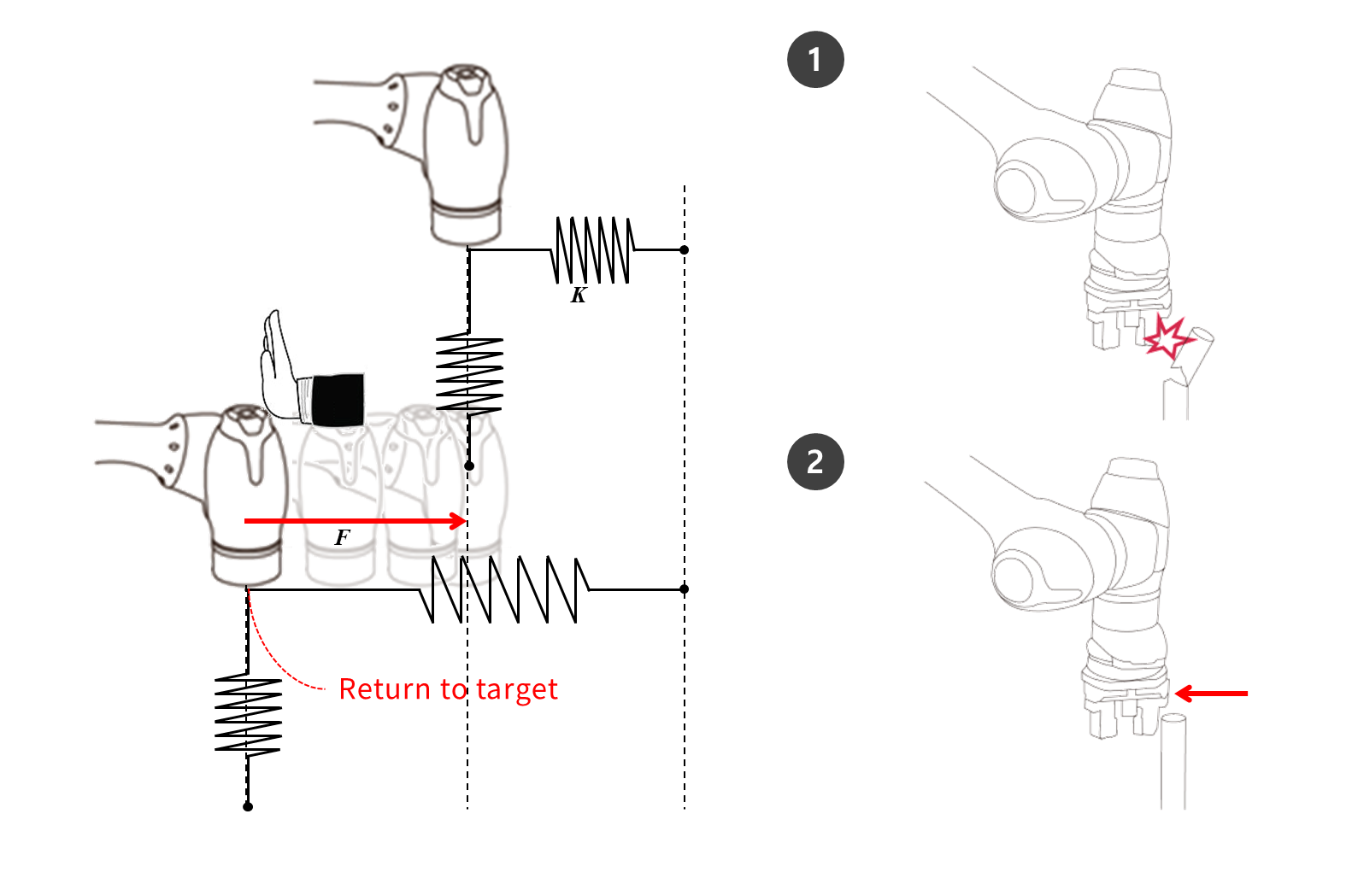
Se F è la forza esterna, K è la rigidità e X è la distanza, le formule seguenti sono vere.
- F = K * X
- K = F / X
- X = F / K.
In base alle formule precedenti, se la rigidità del controllo di conformità è impostata su 1000N/m e se il robot si muove di 1 mm, la forza esterna generata è 1N.
- F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Nota
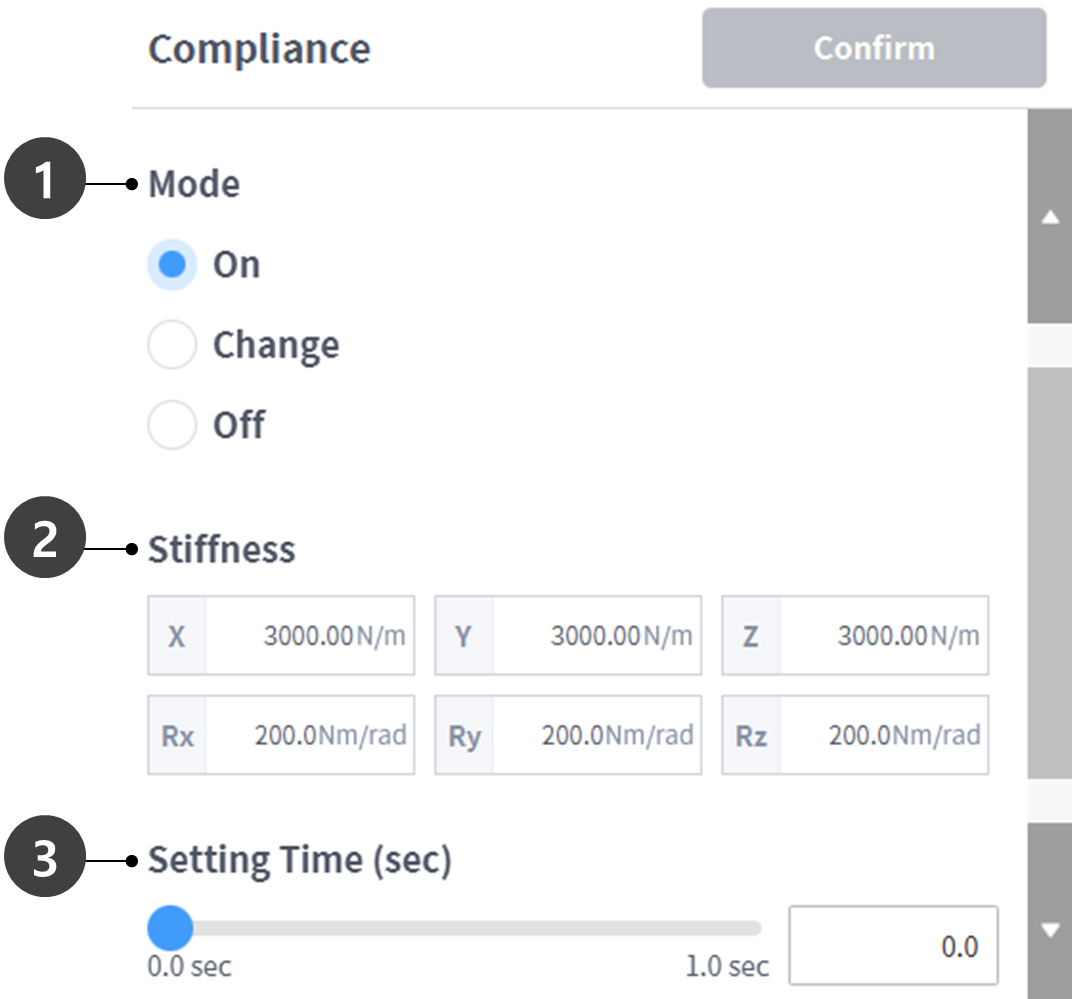
Nella proprietà di Compliance Command, è possibile impostare i seguenti valori:
- Modalità
- Acceso: Consente il controllo della conformità
- Modifica: Se la modalità di conformità è impostata su on, cambia in rigidità
- OFF: Disattiva il controllo di conformità
- Gamma di rigidità
- M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
- A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
- Valori di rigidità inferiori risponderanno più delicatamente alla forza esterna e richiederanno più tempo per tornare al punto target
- Impostazione dell'ora
- È il tempo necessario affinché il valore di rigidità corrente raggiunga il valore di rigidità impostato (0-1s)
Attenzione
- Il peso dell'utensile e il TCP (Tool Center Point) devono essere impostati con precisione. Un peso utensile impreciso può causare il rilevamento del peso utensile da parte del robot come forza esterna e l'attivazione del comando di conformità genera un errore di posizione.
- La tensione del vestito può generare una coppia esterna sul robot. Pertanto, prestare attenzione quando si installa il pacchetto di abbigliamento.
- La compliance non può essere attivata o disattivata durante l'esecuzione del movimento asincrono o del movimento di blending.
- Durante Compliance Command on, è consentito solo il movimento lineare. Non sono consentiti movimenti articolari, come MoveJ e MoveSJ.
- Durante l'opzione Compliance Command on, non è possibile modificare il peso dello strumento o il TCP.
- Durante l'opzione Compliance Command on, è possibile non raggiungere con precisione il punto target a causa della conformità della coppia generata durante l'esecuzione del movimento. Pertanto, si consiglia di attivare il controllo di conformità vicino al punto di destinazione. In alternativa, è possibile ridurre al minimo l'errore di posizione impostando un valore di rigidità grande.
Controllo della forza

Il controllo della forza è una funzione che applica la forza nella direzione di controllo della forza finché la forza impostata e la forza di repulsione non formano un equilibrio
- Sposta il robot nella direzione della forza impostata e, se viene effettuato il contatto con un oggetto, mantiene la forza inserita (N)
- È in grado di controllare il movimento in una direzione diversa dalla direzione della forza mentre si applica una forza costante
- L'impostazione minima è +/- 10N e può essere regolata con una risoluzione di 0,2N
- Controllo forza non disponibile nella zona di singolarità
- In generale, il controllo di conformità viene utilizzato insieme al controllo della forza in modo che il controllo della forza sia conforme alla forza esterna
Nota
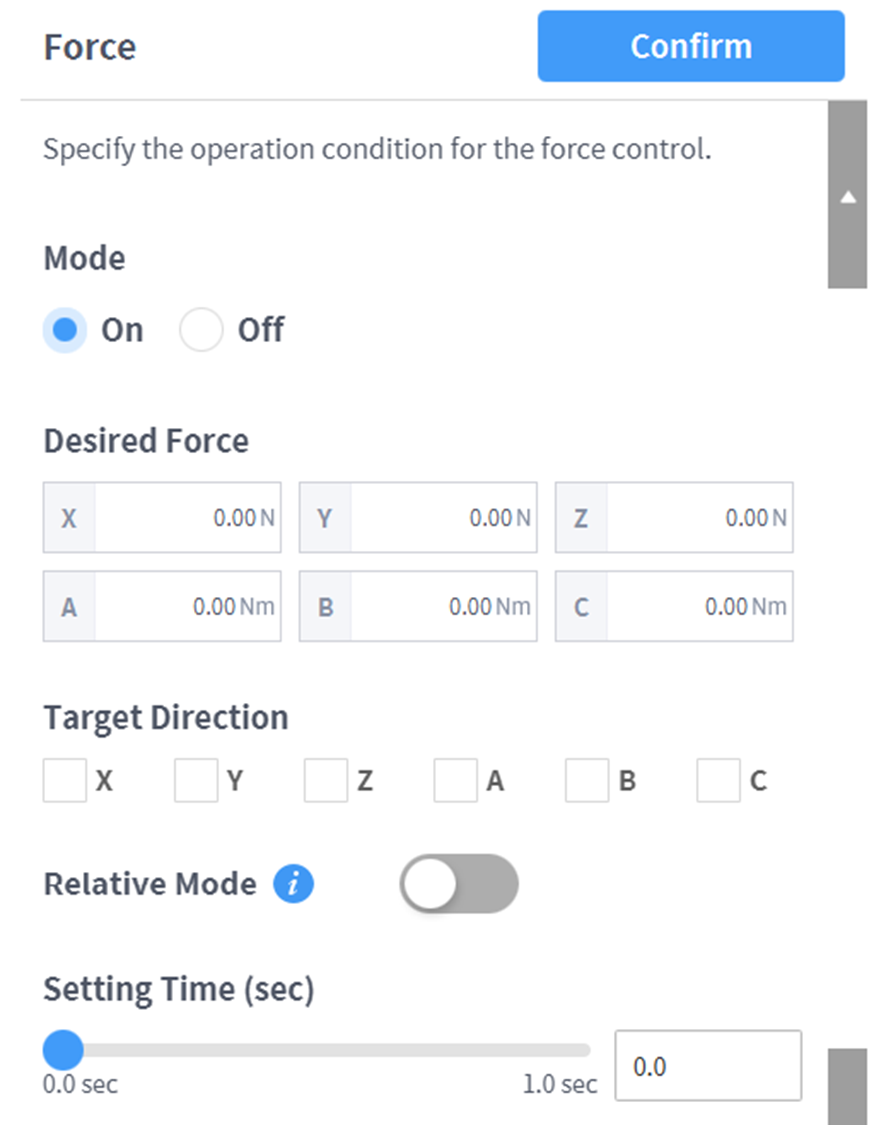
Dalla proprietà di forza comando, è possibile impostare i seguenti valori.
- Modalità
- Acceso: Attiva il controllo della forza
- OFF: Disattiva il controllo della forza
- Gamma di forza desiderata
- X, Y, Z: 10 - (massimo di ciascun robot) N.
- A, B, C: 5 - (massimo di ciascun robot) Nm
- Per ulteriori informazioni sulla forza massima, fare riferimento Gamma valori di soglia superiore/inferiore e valori di default dei parametri di sicurezzaalla .
- Direzione di destinazione
- Si sposta sul valore target selezionato di ogni direzione.
- È possibile effettuare più selezioni.
- Il controllo della forza può essere eseguito solo con l'impostazione della direzione dopo l'impostazione della forza.
- Se una delle direzioni selezionate raggiunge la forza target, continuerà a muoversi fino a quando non viene raggiunto il valore target per l'altra direzione.
- Modalità relativa
- Se questa modalità è abilitata, calibra la forza esterna applicata sul robot a 0 per migliorare la precisione del controllo della forza.
- Quando la modalità relativa è disattivata, la forza effettiva applicata sul bersaglio è uguale alla somma della forza impostata e della forza esterna.
- Quando la modalità relativa è attivata, la forza effettiva applicata sul bersaglio è uguale alla forza impostata.
- Durante il controllo della forza, può verificarsi una deviazione a seconda della posa o della forza esterna.
- Durante il controllo della forza, è possibile non raggiungere il punto target esatto. Pertanto, si consiglia di attivare il controllo della forza vicino al punto target.
- Se questa modalità è abilitata, calibra la forza esterna applicata sul robot a 0 per migliorare la precisione del controllo della forza.
- Impostazione dell'ora
- È il tempo necessario affinché il valore di forza corrente raggiunga il valore di forza impostato (0-1s)