
Pulsante cockpit (cinque pulsanti)
L'utente può modificare la posizione del robot tenendo premuto il pulsante di guida manuale o il pulsante personalizzato sul pannello di controllo (cockpit).
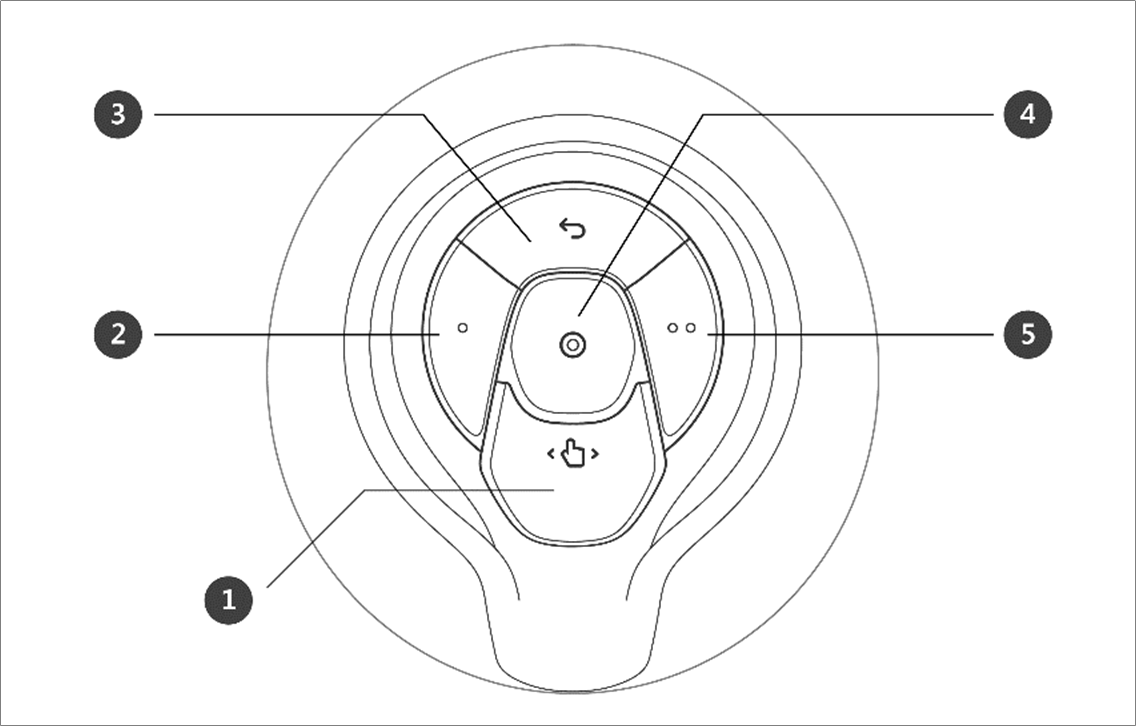
No. | Elemento | Descrizione |
|---|---|---|
1 | Hand-Guiding Button | Questo pulsante può essere utilizzato per regolare o modificare la posizione del robot. |
2,5 | Pulsante di impostazione utente | Questo pulsante consente di modificare la posizione del robot inserendo una posizione in base ad una condizione di blocco corrispondente ad una modalità.


 Per maggiori informazioni sulle impostazioni, vedere "(2.12.2-it_IT) Impostazione del pannello di controllo (Cockpit)." |
3 | Cancel Button | Elimina l'ultima posizione salvata. |
4 | Save Pose Button | Salva l'attuale posizione del robot. Per maggiori informazioni, vedere “(2.12.2-it_IT) Impostazione del punto di lavoro del comando abilità con i pulsanti del pannello di controllo (cockpit).” |