
Posizioni e condizioni di misura
La misurazione del Giunto 1 viene effettuata con l'asse di rotazione perpendicolare al terreno durante il movimento orizzontale.
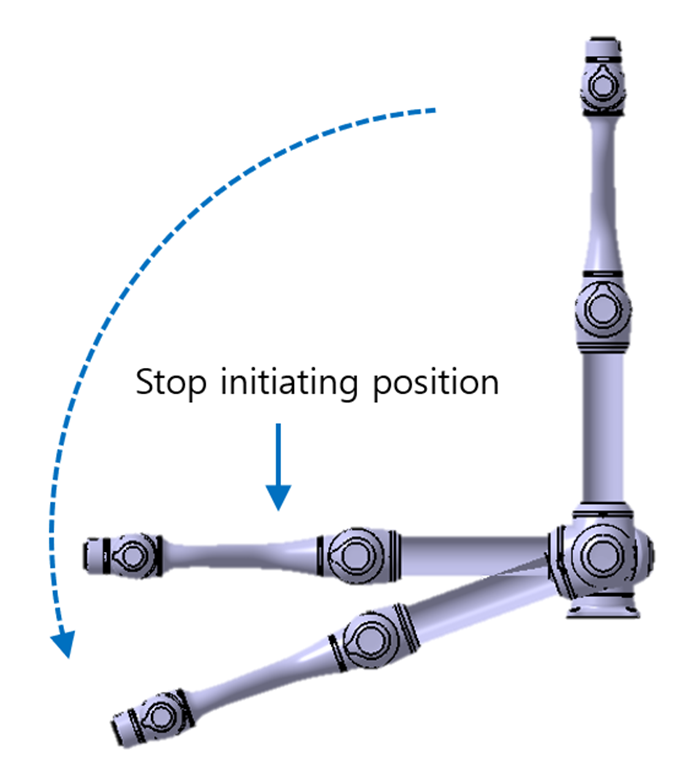
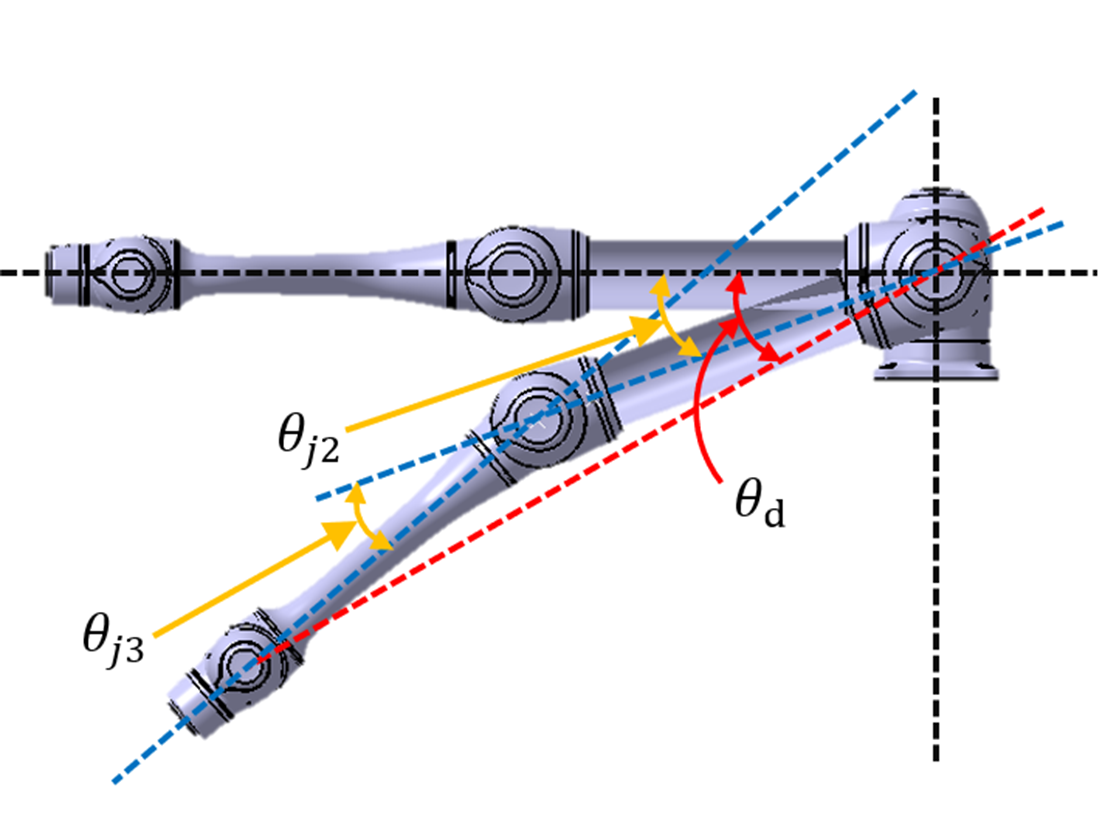
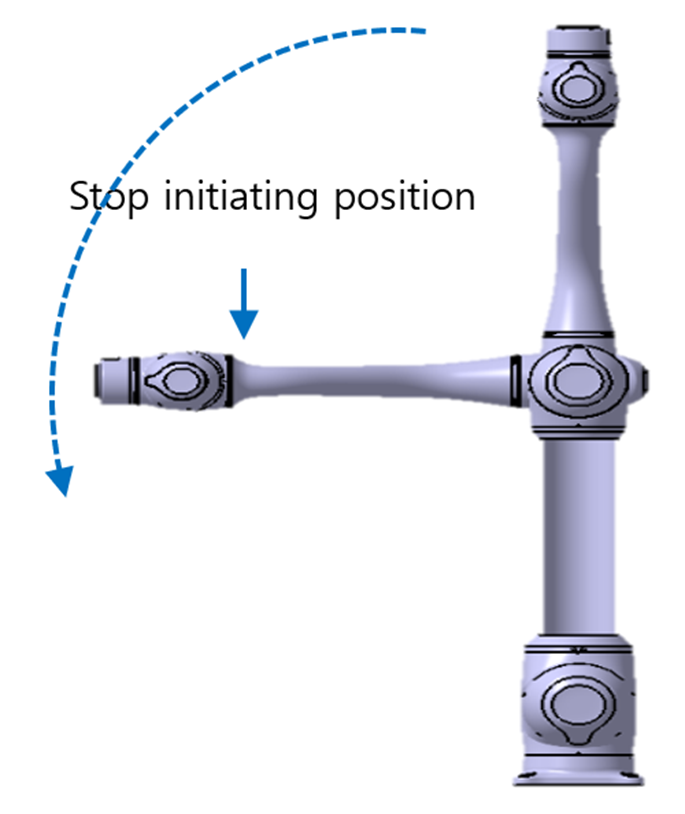
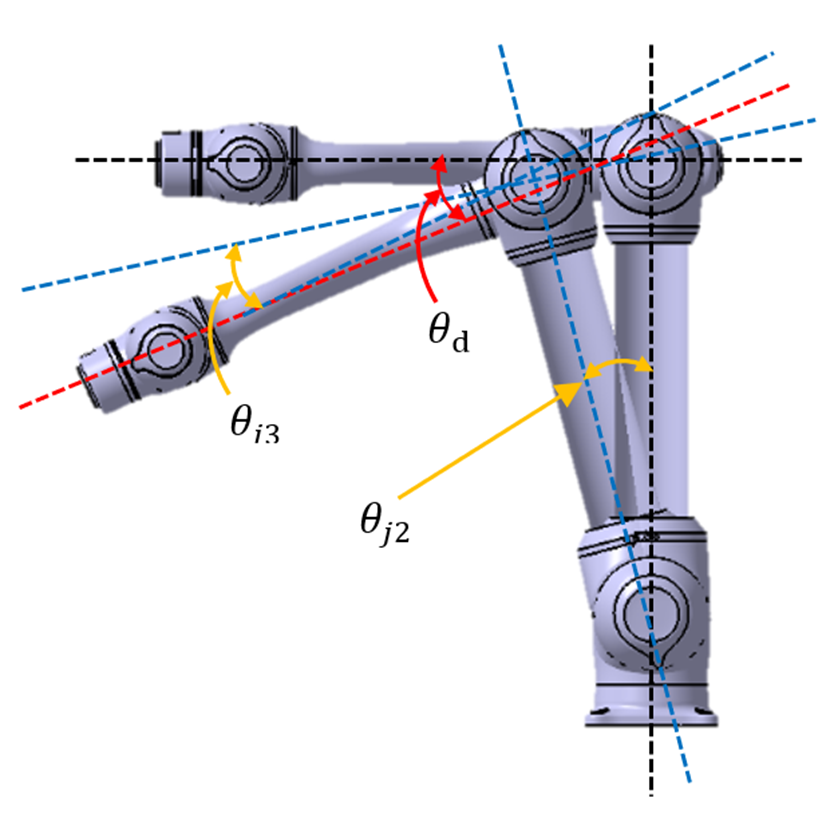
Le misurazioni del Giunto 2 e del Giunto 3 vengono effettuate con l'asse di rotazione parallelo al terreno e quando il robot viene arrestato durante un movimento verso il basso verticale rispetto al terreno.
Nota
Le misurazioni sono il risultato del caso peggiore. La misura può variare a secondo delle circostanze
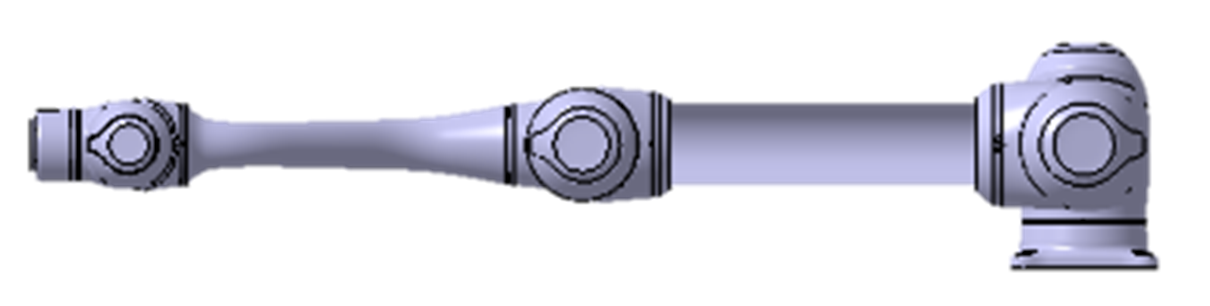
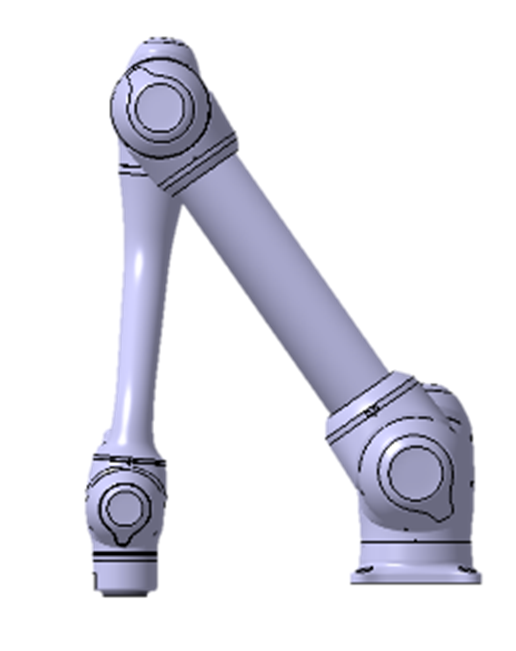
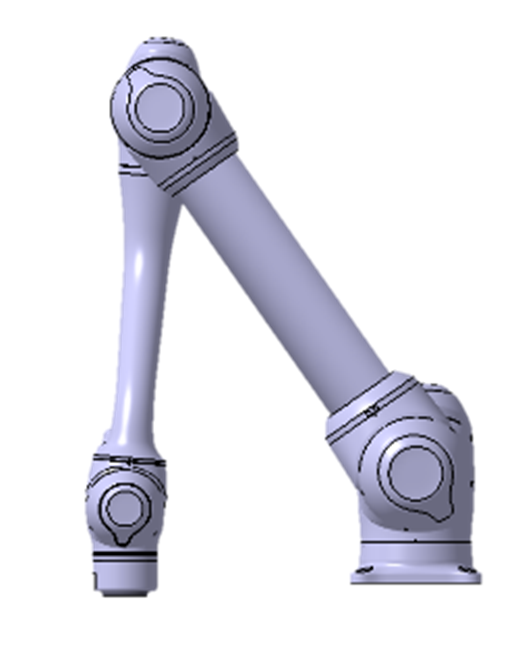
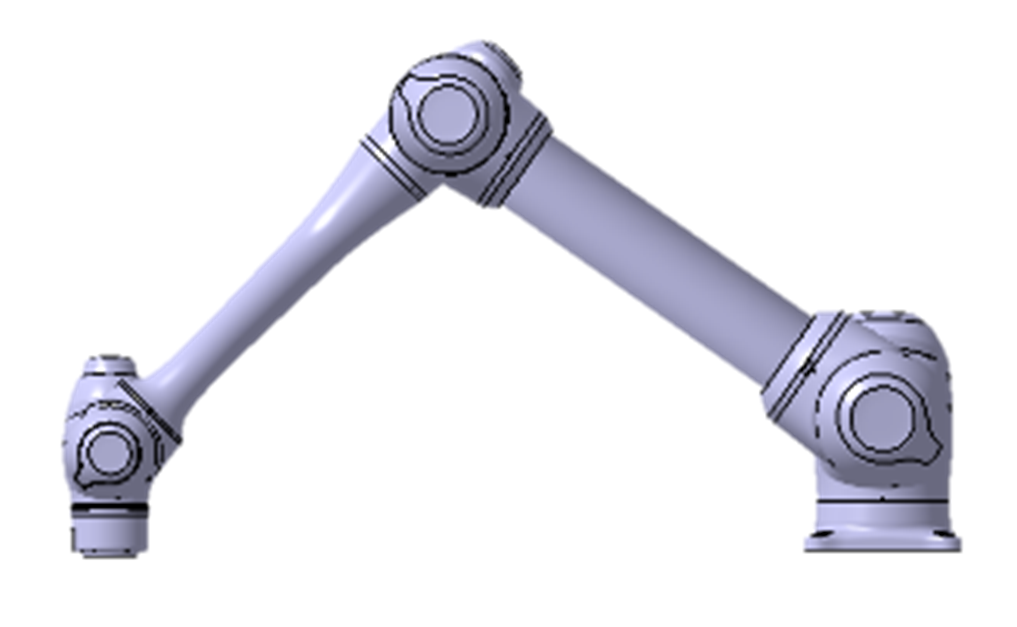
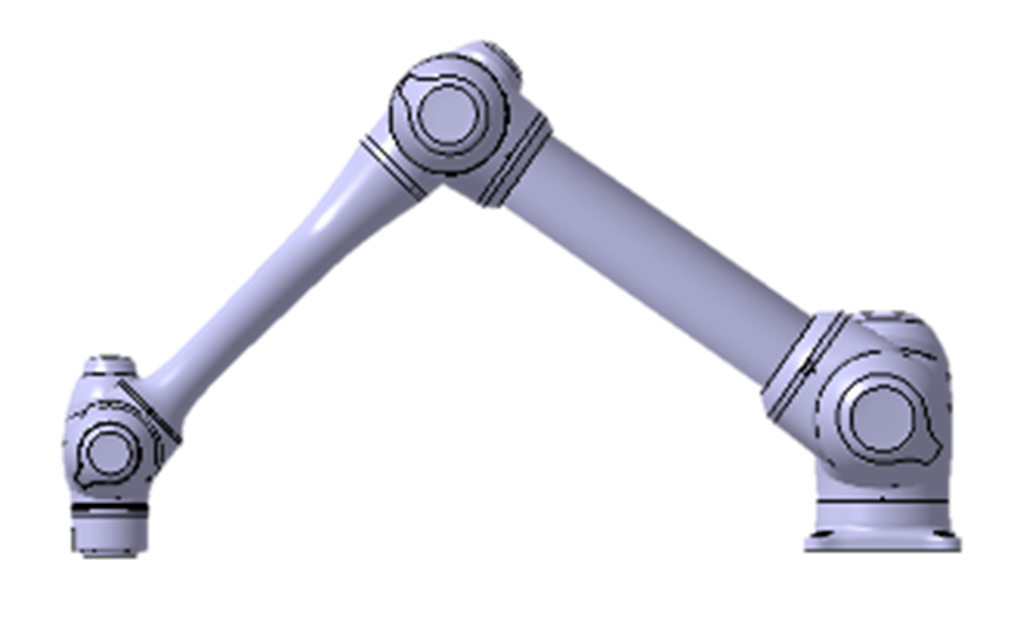
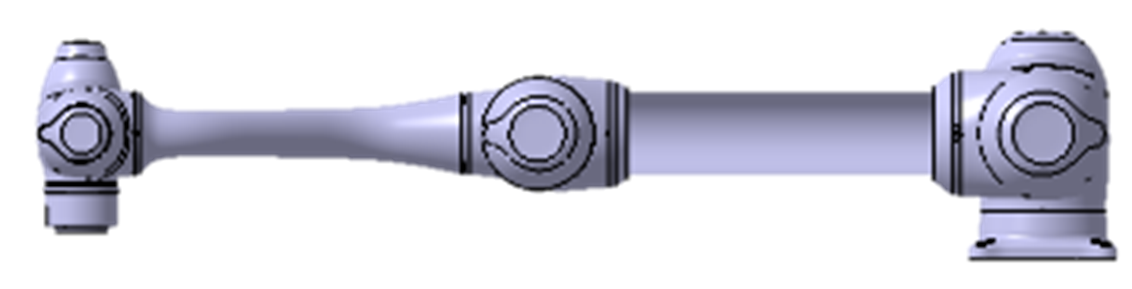
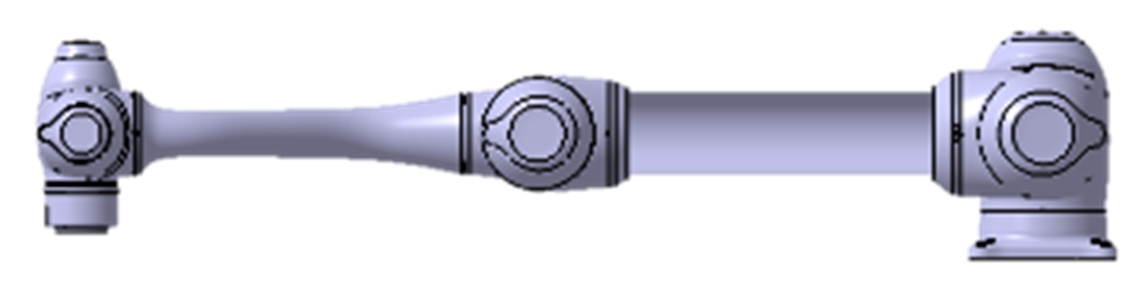
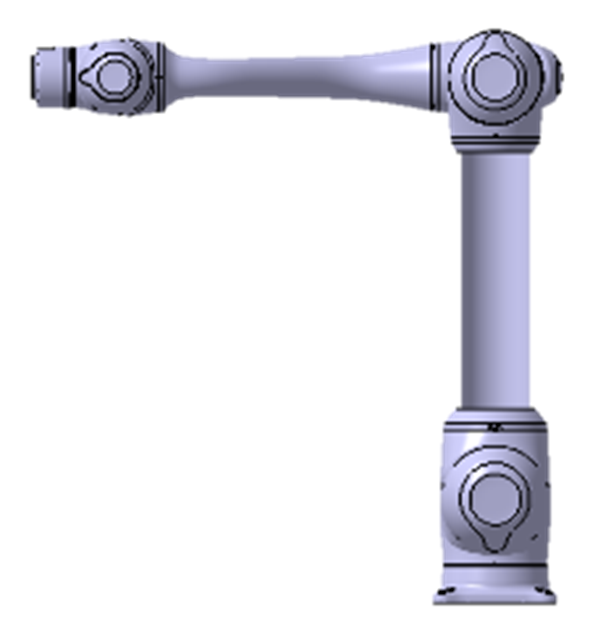
Posizione per il 33%, 66%e il 100% di estensione
| Giunto 1 | Giunto 2 | Giunto 3 |
Estensione 100% Categoria di arresto 0 |
 |
 |
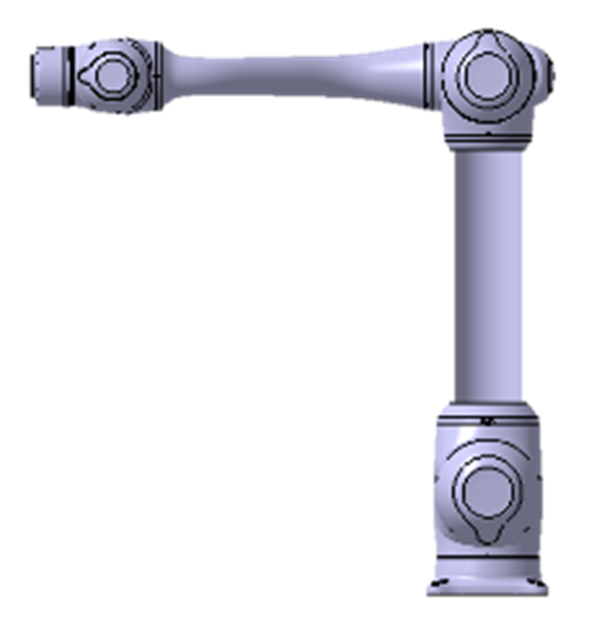 |
Estensione 33% Categoria di arresto 1 |
 |
 |
- |
Estensione 66% Categoria di arresto 1 |
 |
 |
- |
Estensione 100% Categoria di arresto 1 |
 |
 |
 |
posizione all'inizio dell'arresto e della misurazione dell'angolo( )
)
Posizione all'inizio dell'arresto | Angolo misurato | |
Giunto1 | 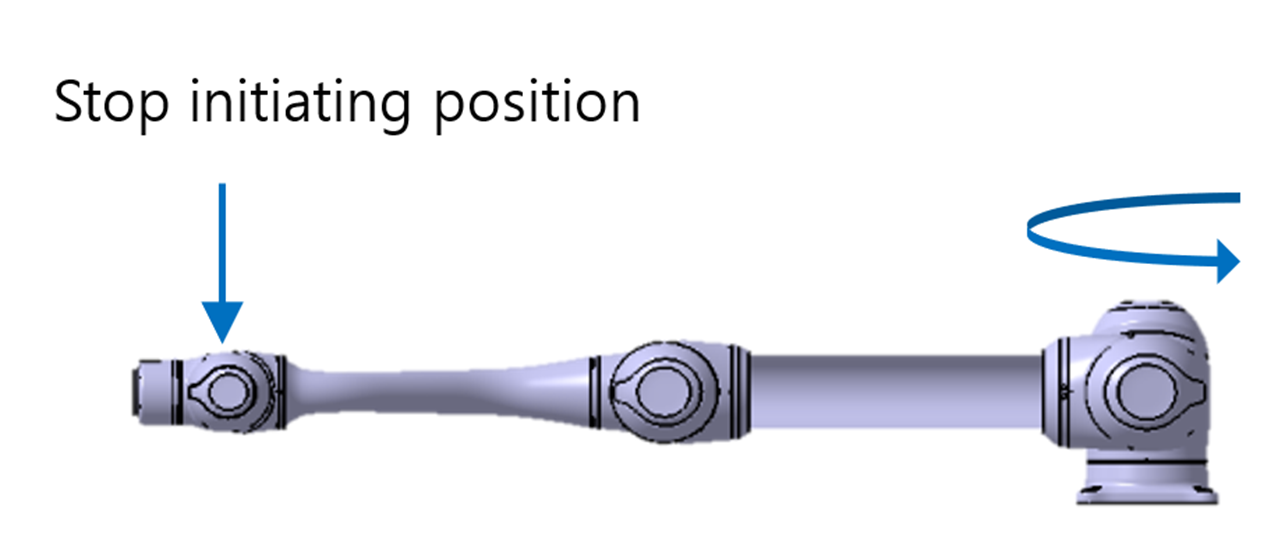 | No slip,
|
Giunto2 |
 |
 |
Giunto3 |
 |
 |