
Impostazione robot - Imposta coordinate globali
OPZIONALE NORMALE 3 MIN
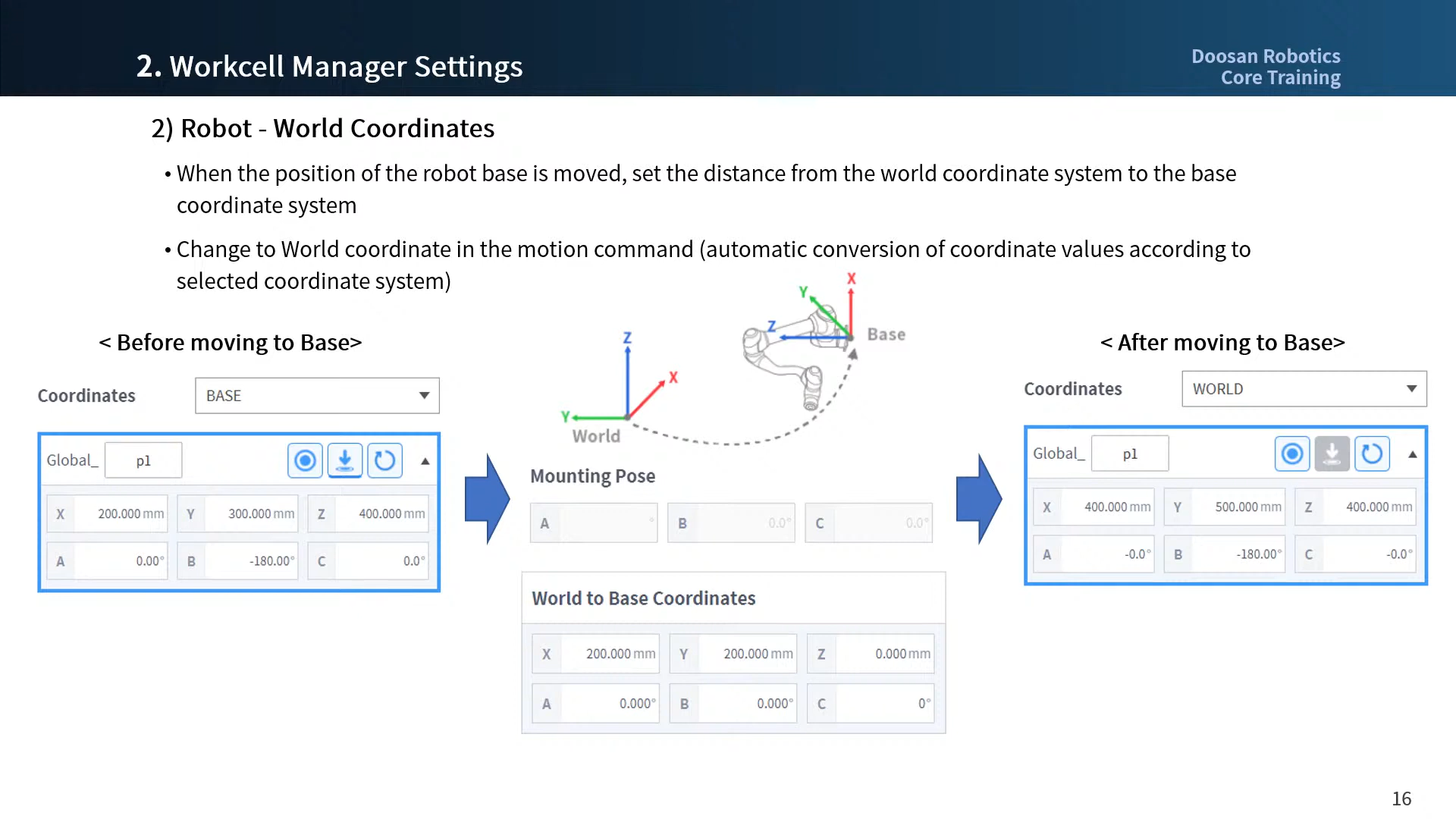
Le coordinate mondiali del robot possono essere impostate da coordinate mondiali. Nel caso in cui la coordinata del robot sia la coordinata di base, questo passaggio può essere saltato.
Le coordinate mondiali possono essere impostate tramite Workcell Manager > Robot > World Coordinates. Per ulteriori informazioni, fare riferimento a Imposta coordinate globali.
Le coordinate globali vengono utilizzate quando la posizione di installazione della base del robot viene spostata/ruotata fisicamente.
La modifica delle coordinate mondiali applicherà lo stesso movimento/rotazione alla schermata del simulatore del robot.
Nota
Le coordinate globali possono essere utilizzate anche dopo che la posizione di base e l'angolo sono stati modificati dopo l'apprendimento del robot. Se le coordinate delle attività create attraverso l'apprendimento del robot in passato vengono modificate da BASE a MONDO, a tutte le coordinate di movimento viene applicato un offset corrispondente allo spostamento/rotazione delle coordinate globali.