
Funzione di intervento dell'operatore
Se si verifica un problema mentre il robot è in funzione o un utente impartisce un comando, il robot smette di funzionare e visualizza un messaggio pop-up che consente all'operatore di intervenire e risolvere la situazione. Dopo che l'utente ha risolto il problema, l'attività continua sulla riga del programma in cui si è verificato il problema.
Nota
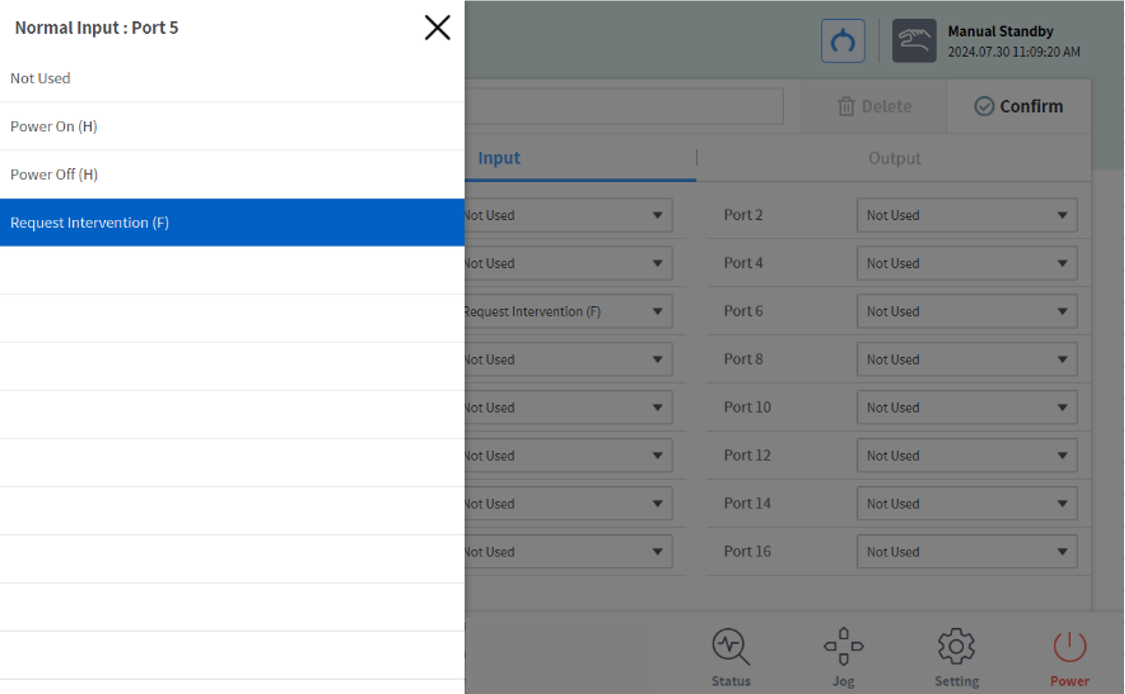
Per utilizzare la funzione di intervento dell'operatore, è necessario completare una delle impostazioni seguenti.
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Per impostazioni dettagliate, fare riferimento alla Welding Techinical Note.)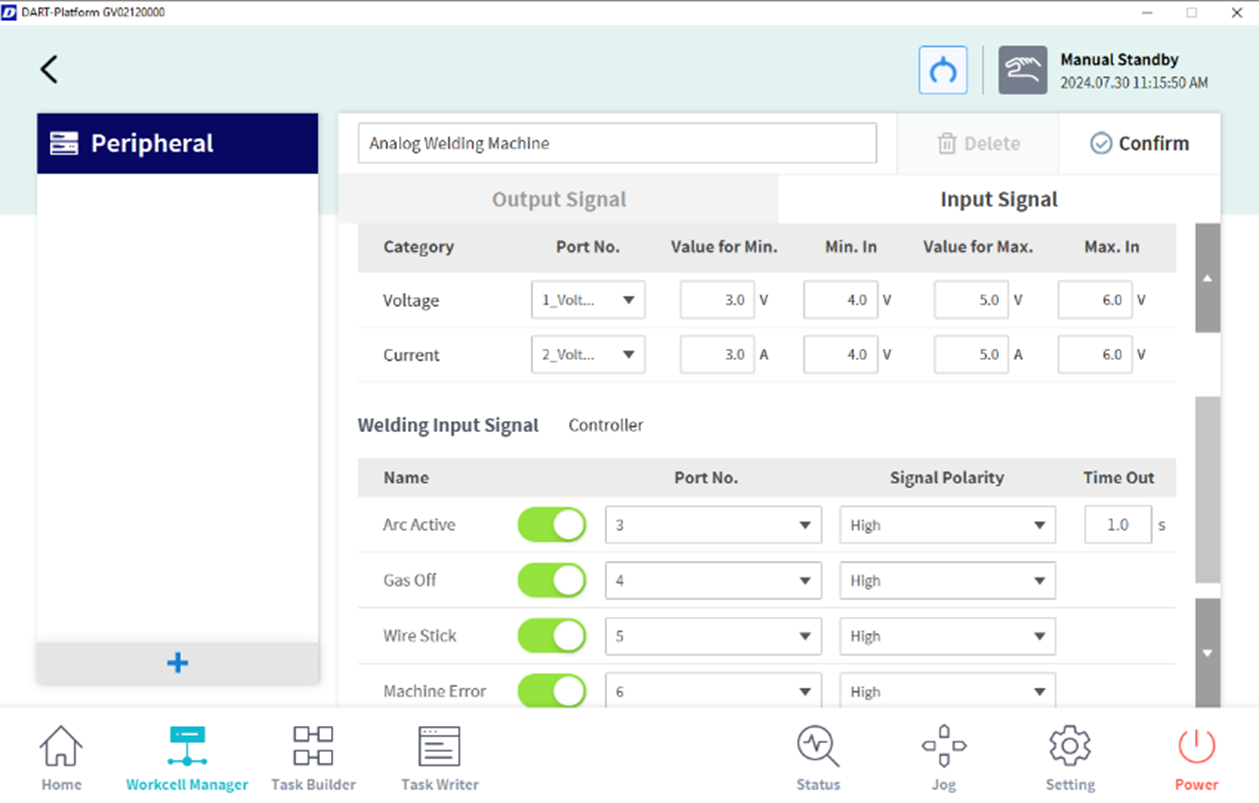
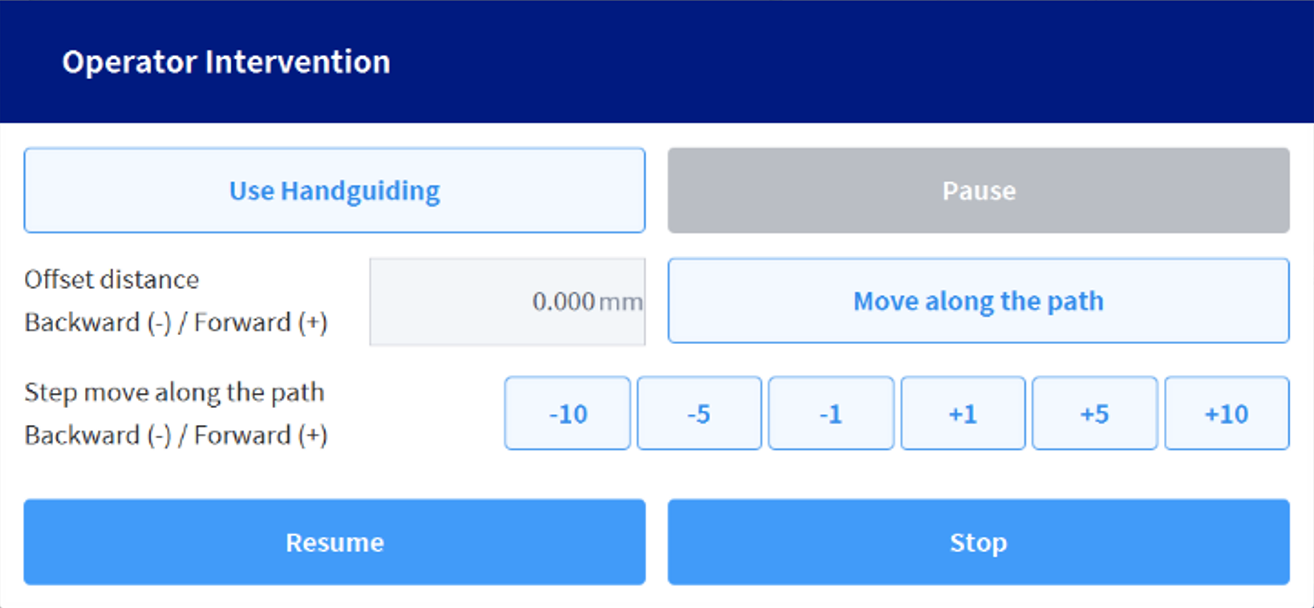
Il pulsante "Sposta lungo il percorso" e il pulsante "Spostamento passo passo (-10,-5,-1,+1,+5,+10)" eseguono la stessa azione. Tuttavia, il primo si sposta in avanti o indietro dalla posizione di riferimento tramite un offset immesso manualmente, mentre il secondo punta a un punto in avanti o indietro tramite un offset passo preimpostato. Dopo aver completato un'azione utilizzando i pulsanti sopra indicati, premendo un pulsante aggiuntivo si sposterà la posizione corrente tramite l'offset.
Il pulsante "Usa Handguiding" si attiva solo quando è impostata una Collaborative Zone e lo stato del robot cambia in Handguiding, che consente l'insegnamento diretto all'interno della Zona. Dopodiché, puoi attivare l'insegnamento diretto premendo il pulsante sul retro della cabina di guida o del Teaching pendant.
In modalità handguiding, il pulsante "Usa Handguiding" cambia in "Pulsante End Handguiding".
Quando premi il pulsante "End Handguiding", lo stato handguiding termina. In questo momento, per motivi di sicurezza, la posizione attuale del robot, l'angolo e i valori del punto di arresto (il momento in cui si verifica il primo pop-up) vengono confrontati per generare un pop-up. Se si verifica un pop-up con i seguenti contenuti, devi ripetere l'insegnamento direttamente per correggere la posizione e la postura del robot e riprovare.
Se la distanza in linea retta tra la posizione TCP corrente e il TCP nella posizione di arresto differisce di oltre 20 cm
Se la differenza tra l'angolo di articolazione corrente e l'angolo di articolazione nel punto di arresto differisce di oltre 1~3 assi (10 gradi) / 4~5 assi (30 gradi) / 6 assi (60 gradi)
Questa funzione è supportata solo durante le operazioni MoveL / MoveC / MoveB.
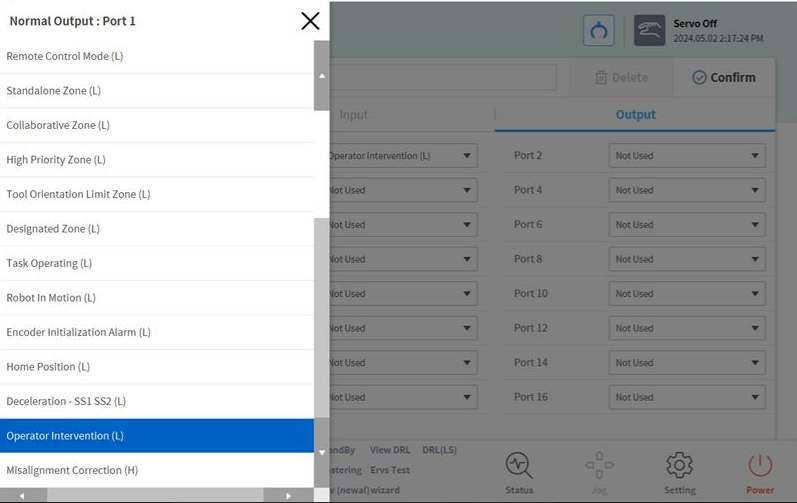
È possibile utilizzare la funzione Normal Output per segnalare che si è verificato un popup. Il segnale rimarrà attivo mentre si verifica il popup e verrà disattivato quando il popup termina.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Ecco lo scenario di utilizzo:
Ricevere un segnale di input digitale dall'utente o da un dispositivo collegato mentre il programma è in esecuzione.
Il robot si ferma e viene visualizzato un popup di intervento dell'operatore.
(Se si utilizza l'insegnamento diretto) Premere il pulsante Use Handguiding, quindi premere il pulsante sul retro della cabina di guida o del teaching pendant per attivare l'insegnamento diretto. Dopo aver completato l'operazione di insegnamento diretto, premere il pulsante End Handguiding.
Premi il pulsante Muoviti lungo il percorso per muovere il robot lungo il percorso.
Dopo aver mosso il robot quanto desideri, premi il pulsante Riprendi per riprendere il compito del robot e chiudere il pop-up.