
Esecuzione basata sull'utensile del robot
Per muovere il robot in base all'utensile del robot, procedere come segue:
Selezionare la scheda Task nella schermata Jog (Movimento a impulsi).
Selezionare Base o World come coordinate da visualizzare e impostare il Tool (Utensile) in base al punto di riferimento delle coordinate attività.
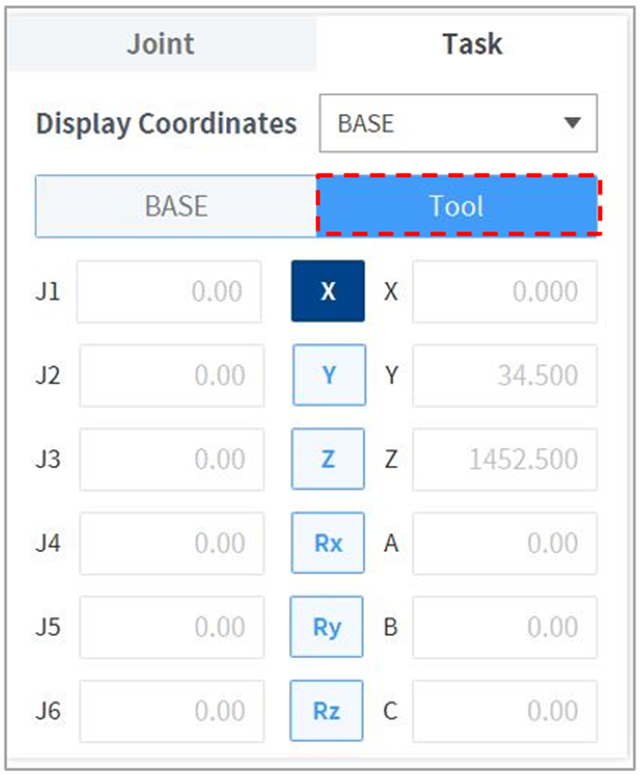
Selezionare le Coordinate Utensile per muovere.
Premere senza rilasciare il pulsante Direzione (


Nota
Le aree di sicurezza non vengono applicate in modalità virtuale.
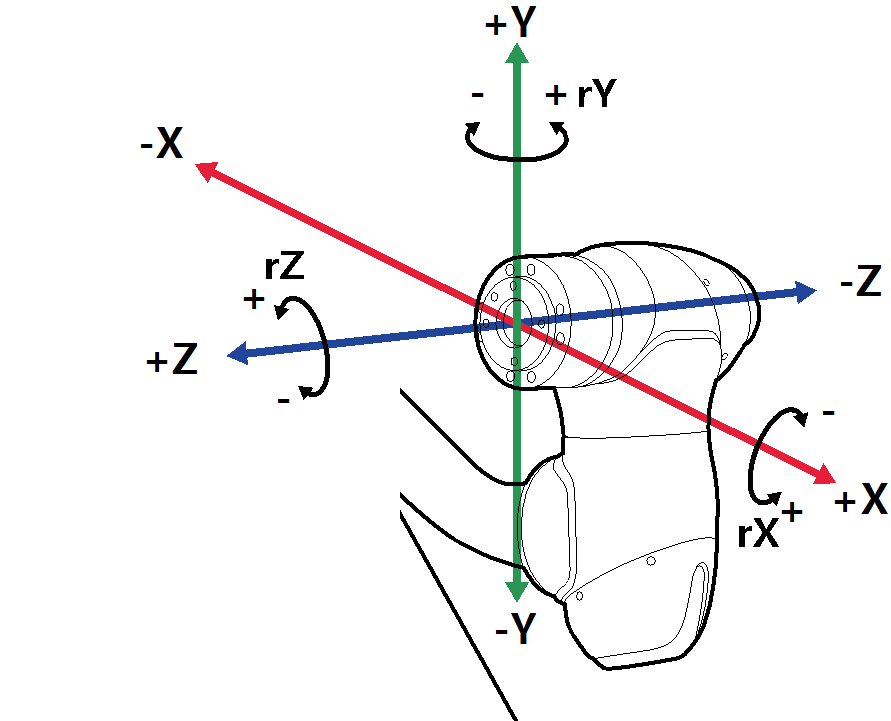
Rx, Ry e Rz vengono eseguiti in accordo con TCP (posizione centro utensile).