
Elemento cella di lavoro - aggiunta posa installazione robot (montaggio)
OPZIONALE FACILE 3 MIN
La posa di installazione del robot può essere impostata aggiungendo un elemento Workcell di posa (mount) di installazione del robot. Se il robot è installato su una superficie piana, questo passaggio può essere ignorato.
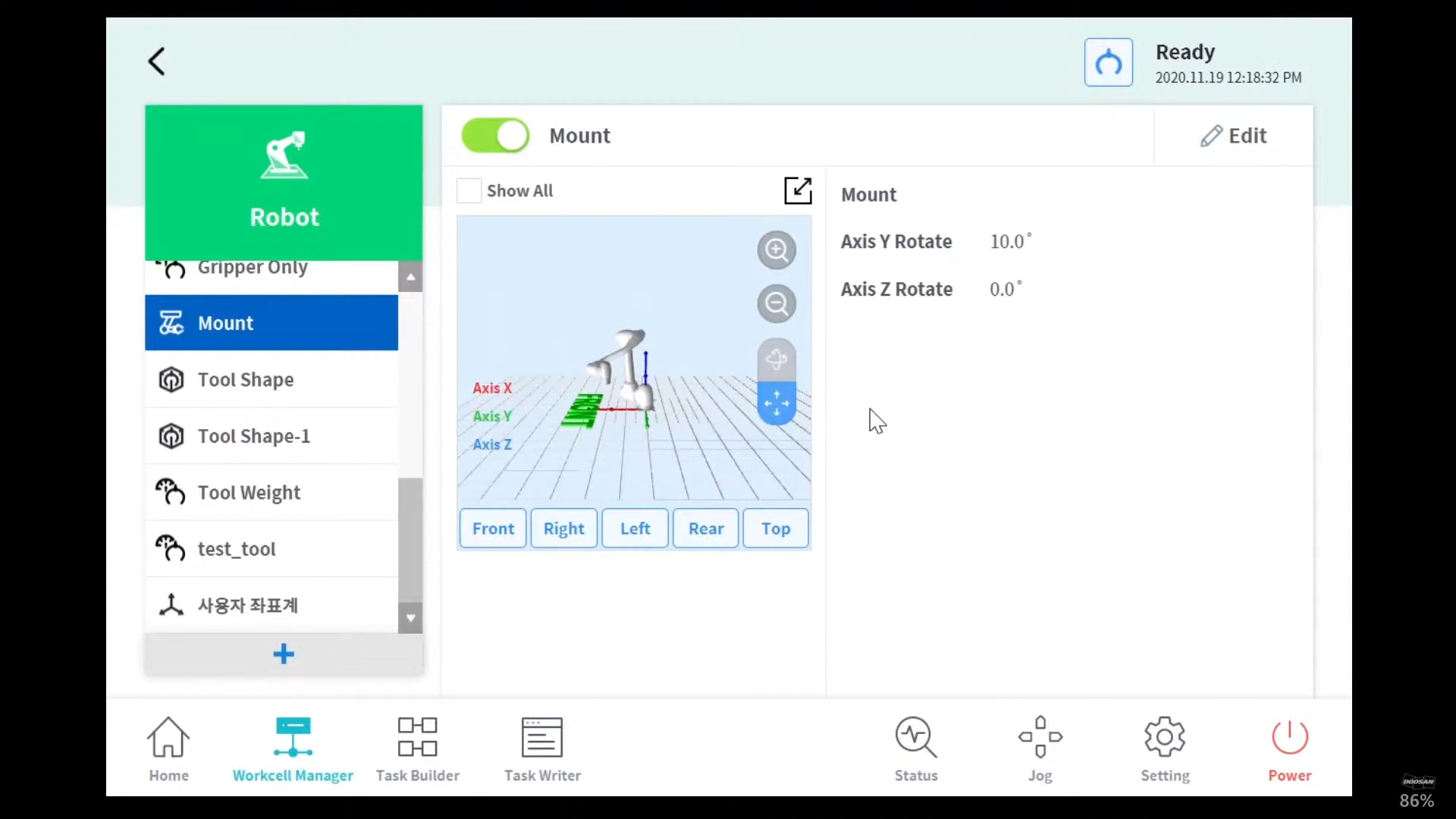
La posa di installazione del robot può essere impostata tramite Workcell Manager > Robot > 
- L'angolo di montaggio può essere misurato utilizzando la funzione di misurazione automatica. Tuttavia, se l'angolo è inferiore a 5 gradi, la misurazione automatica non è disponibile.
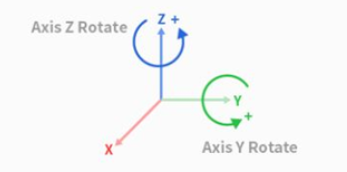
- Se il robot è installato sul soffitto o sulla parete, l'angolo di installazione del robot può essere impostato con rotazioni dell'asse Y e dell'asse Z.
- Poiché il calcolo automatico del peso dell'utensile viene eseguito in base alla gravità, si consiglia di reimpostare il peso dell'utensile una volta eseguita l'impostazione del montaggio.
Una volta registrato (confermato) l'elemento della cella di lavoro, l'interruttore a levetta deve essere attivato per poter utilizzare l'elemento della cella di lavoro.
Attenzione
- Quando si imposta l'elemento Workcell di posa (mount) dell'installazione del robot, si consiglia di modificare anche le coordinate globali. Se le coordinate globali non vengono modificate, la posa del robot sullo schermo del simulatore del robot del teach pendant viene visualizzata come il robot installato sulla superficie piana (base).