Avvio del sistema
Dopo aver acceso il sistema, ha inizio la fase di avvio. Completato l'avvio, l'applicazione di sistema viene visualizzata sulla console portatile. Per maggiori informazioni sull'applicazione di sistema, vedere “Configurazione della schermata del programma”
In caso di piattaforma DART (per Windows),
- Eseguire la piattaforma DART installata sul desktop o sul laptop.
- Attendere circa 5 minuti affinché il controller del robot termini l'avvio.
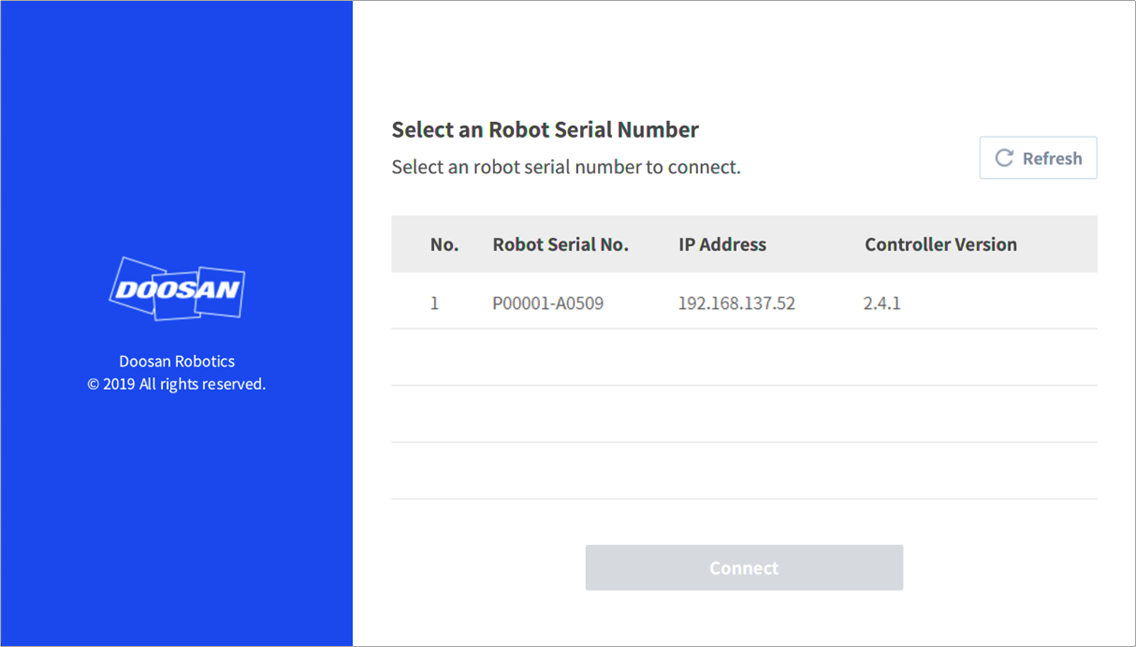
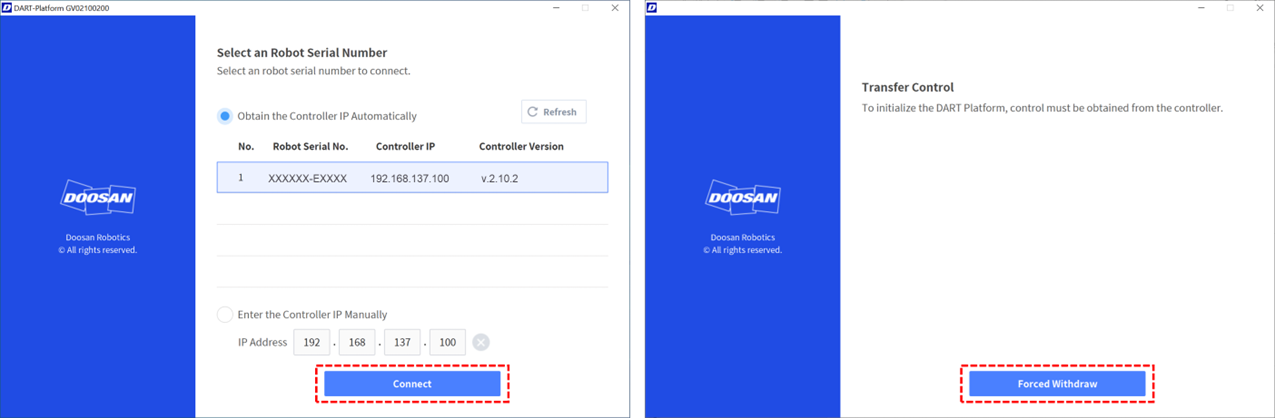
- Quando viene cercato l'IP, controllare il numero di serie del dispositivo connesso alla rete.
- Selezionare il robot che si desidera connettere e fare clic sul pulsante "Connetti".
- Premere il pulsante Force Recall per trasferire il controllo.
Nota
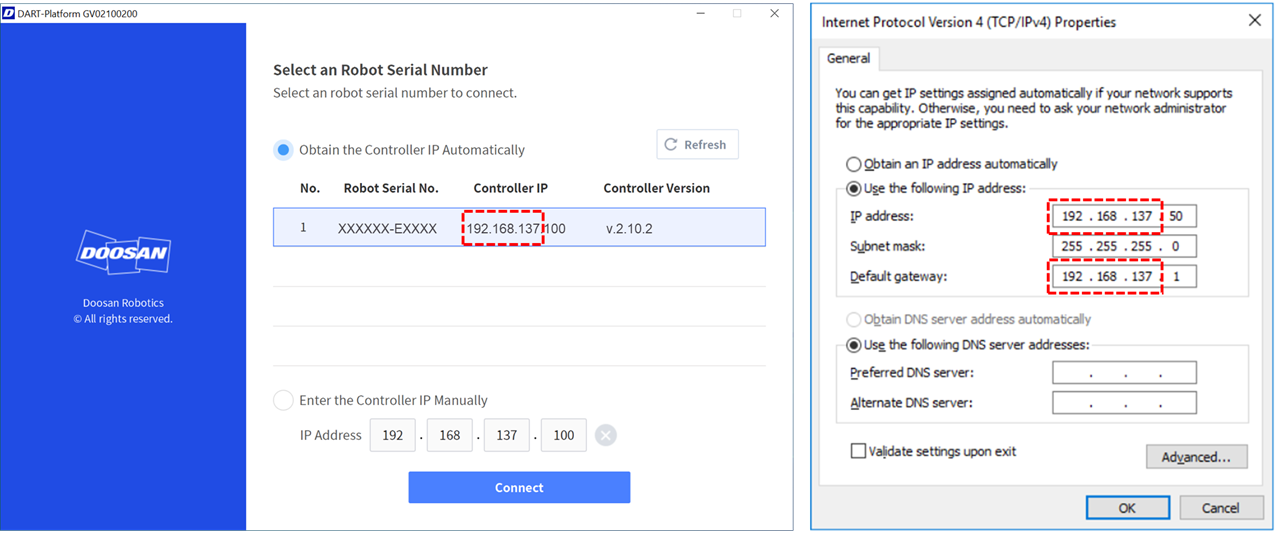
Se non è presente alcuna connessione tra il controller e la piattaforma DART, modificare la banda di classe C dell'indirizzo IP e il gateway predefinito del desktop o laptop con la piattaforma DART installata nella banda di classe C dell'indirizzo IP del controller e riprovare.
Se l'IP non viene cercato, selezionare 'Inserisci manualmente l'IP del controller' e procedere con la connessione. L'indirizzo IP predefinito del controller è impostato su 192.168.137.100.
Se il ritiro forzato del controllo continua a fallire, controllare quanto segue:
Chiudere il programma e riavviare.
Assicurarsi che i pulsanti di arresto di emergenza non siano premuti.
Se una o più coppie di ingressi digitali del controller sono designate per il segnale Arresto di emergenza/Arresto di emergenza remoto/STO (Attivo basso) nell'impostazione I/O di sicurezza, assicurarsi che tutti i segnali designati siano disattivati ( Alto).
Controllare se il controller ha terminato l'avvio.
Controllare lo stato del robot. In caso di controllo remoto, ripristino o backdrive, l'esecuzione della piattaforma DART potrebbe non riuscire.
Nota
- Servo On: Per modificare la posizione del robot, il robot deve trovarsi nello stato Servo On in cui i i giunti del robot sono alimentati e quest'ultimo è in standby. Per maggiori informazioni su Servo On, vedere “Servo On”
- Impostazione di data e ora: Poiché la data e l'ora visualizzate sulla Teach pendant (console portatile) e il messaggio di registro memorizzati sul robot seguono l'impostazione di data e ora del sistema, la data e l'ora devono essere configurate al primo avvio. Per informazioni sulla modalità di configurazione della data e dell'ora, vedere " Impostazione di data e ora"
- L'utilizzo della DART Platform consente il controllo del robot senza l'uso della Teach pendant (console portatile).
- La DART Platform visualizza una schermata che mostra il robot collegato alla rete dovo l'avvio e il processo di verifica del numero di serie del robot oltre alla connessione di quest'ultimo.