
Impostazione dei limiti di sicurezza
Per impostare i limiti di sicurezza del robot, toccare il pulsante 
- Immettere il nome della Workcell nel campo relativo nella parte superiore della schermata riferita alle Impostazioni della Workcell.
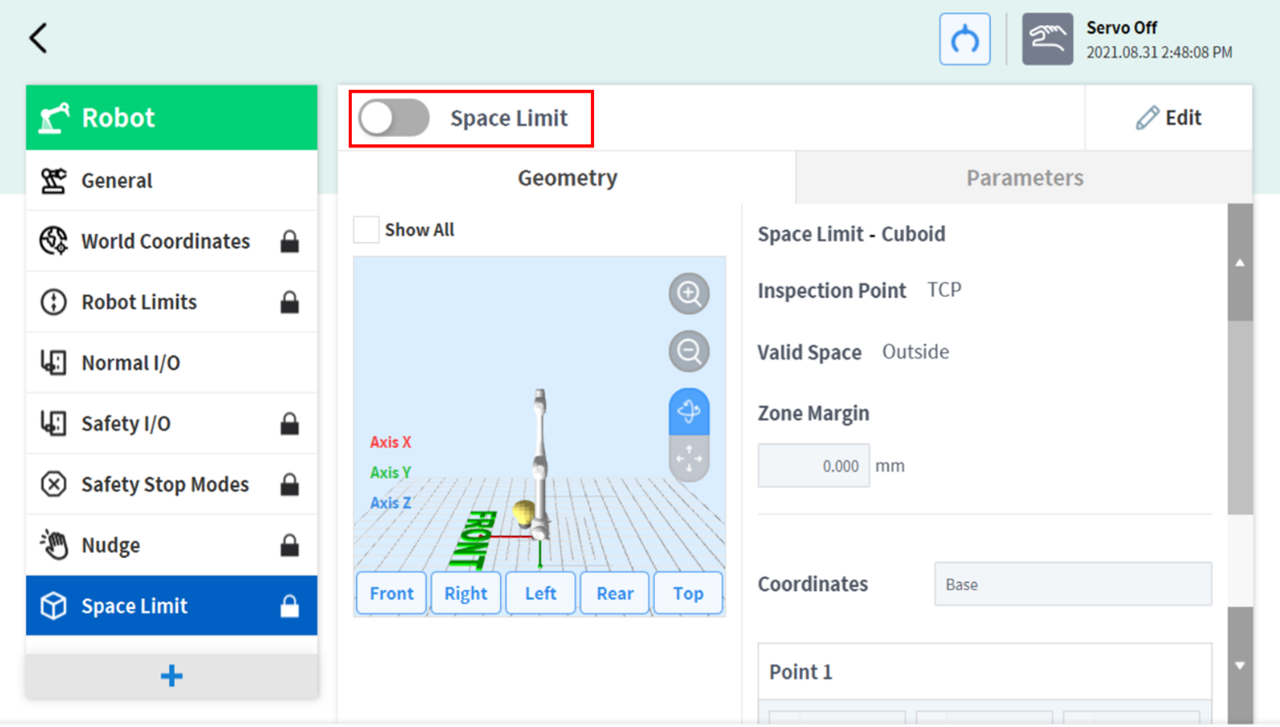
- Impostare i dati sulla posizione in base alla forma di Limiti di spazio insieme a Punto di ispezione, Spazio valido e Margine zona nella scheda Geometria.
- Impostare Abilita zona dinamica e Opzioni avanzate nella scheda Parametri e premere Bozza.
- Verificare che tutti i parametri visualizzati siano quelli desiderati, quindi spuntare Conferma bozza e premere Conferma
- Premere il pulsante di attivazione per applicare i limiti allo spazio.
Nota
Sono possibili errori ai margini della zona in funzione dei metodi di configurazione.
- Se il profilo utensile è impostato e il controllo del volume del Corpo non è selezionato, il margine TCP è 0 mm.
- Se il profilo utensile è impostato e il controllo del volume del corpo (Body) è selezionato, il margine TCP è 0 mm.
- Se il profilo utensile non è impostato e il controllo del volume del Corpo non è selezionato, il margine TCP è 0 mm.
- Se il profilo utensile non è impostato e il controllo del volume del Corpo è selezionato, il margine TCP è 60 mm.