Per muovere il robot in base alle Coordinate Mondo, procedere come segue:
Selezionare la scheda Task nella schermata Jog (Movimento a impulsi).
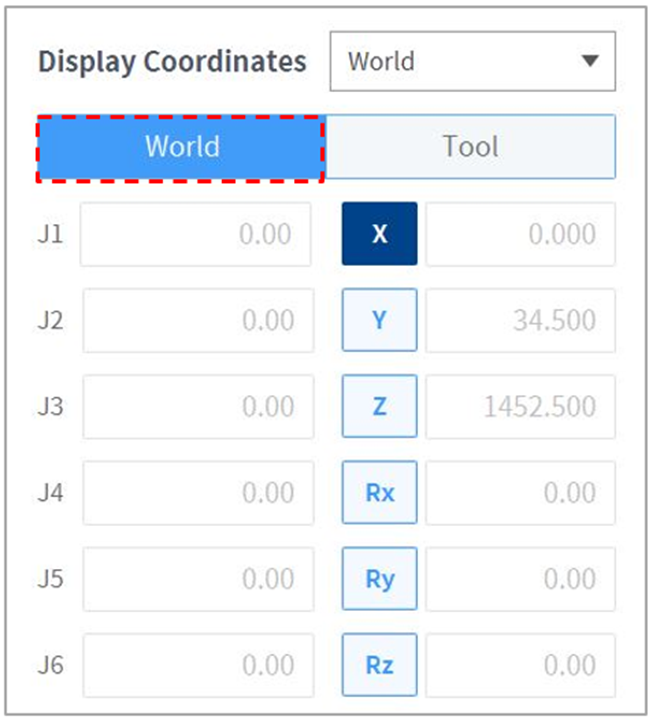
Selezionare le coordinate visualizzate da utilizzare come Coordinate Mondo e selezionare quindi World (Mondo) come punto di riferimento delle coordinate attività.
Selezionare le Coordinate Mondo da muovere.
Premere senza rilasciare il pulsante Direzione (, ) per spostare l'asse corrispondente.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.