Pulsante cockpit (cinque pulsanti)
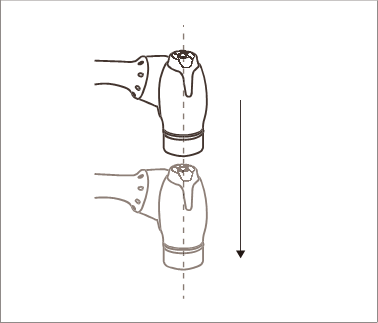
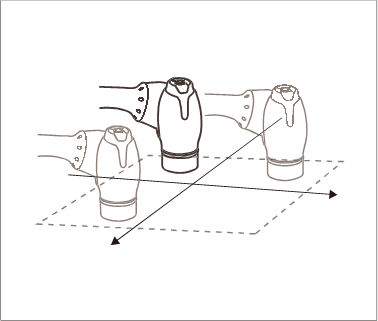
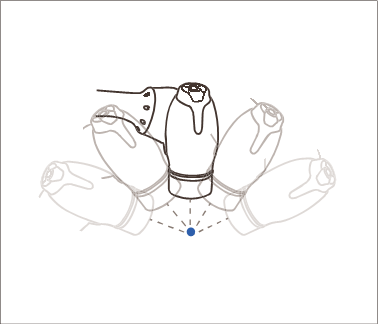
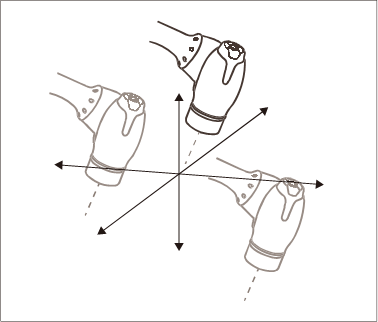
L'utente può modificare la posizione del robot tenendo premuto il pulsante di guida manuale o il pulsante personalizzato sul pannello di controllo (cockpit).
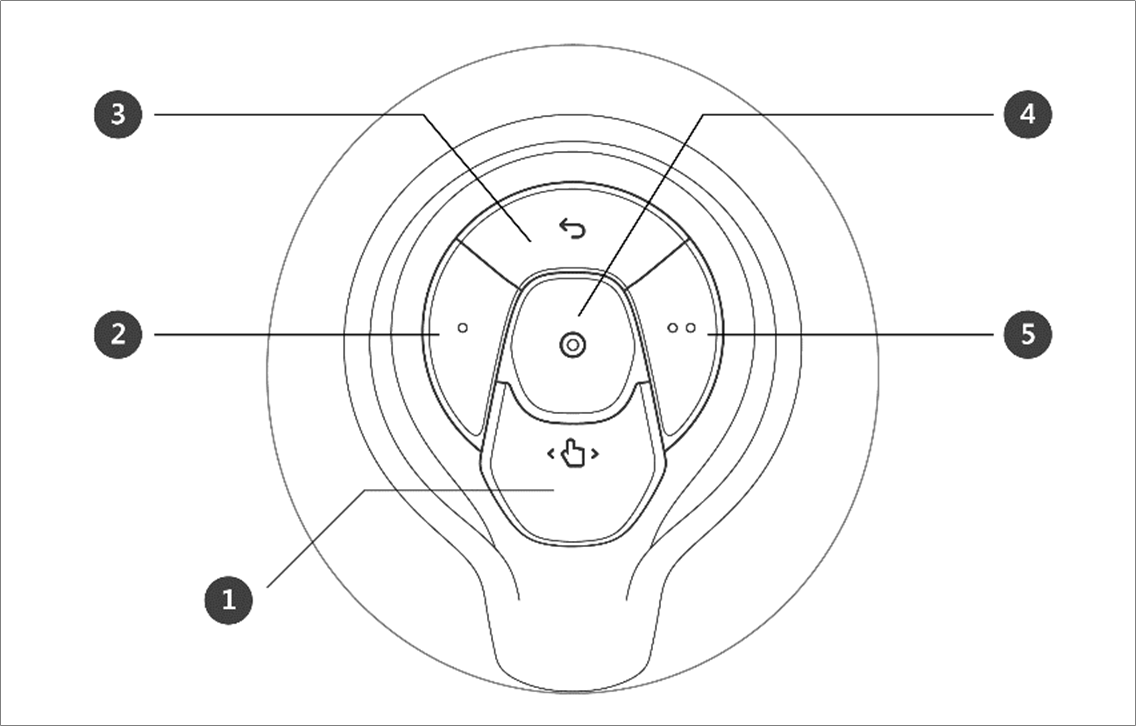
N. | Voce | Descrizione |
|---|---|---|
1 | Hand-Guiding Button | Questo pulsante può essere utilizzato per regolare o modificare la posizione del robot. |
2,5 | User Setting Button | Questo pulsante consente di modificare la posizione del robot inserendo una posizione in base ad una condizione di blocco corrispondente ad una modalità.
Per maggiori informazioni sulle impostazioni, vedere "Impostazione del pannello di controllo (Cockpit)." |
3 | Cancel Button | Elimina l'ultima posizione salvata. |
4 | Save Pose Button | Salva l'attuale posizione del robot. Per maggiori informazioni, vedere “Impostazione del punto di lavoro del comando abilità con i pulsanti del pannello di controllo (cockpit).” |