
I/o flangia
Il coperchio della flangia terminale del robot è dotato di un connettore a 8 pin con specifica M8 e fare riferimento alla figura riportata di seguito per la posizione e la forma.
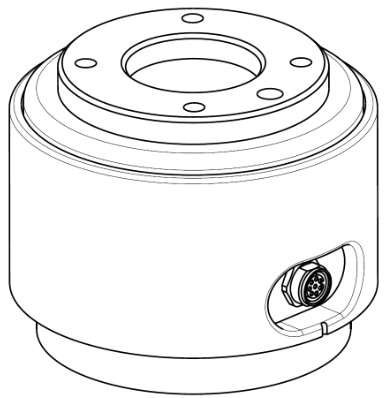
Il connettore fornisce l'alimentazione e i segnali di controllo necessari per azionare la pinza o i sensori incorporati in attrezzi robotizzati specifici. Di seguito sono riportati i cavi industriali di esempio (è possibile utilizzare cavi equivalenti):
Phoenix Contact 1404178, maschio (diritto)
Phoenix Contact 1404182, maschio (ad angolo retto)
Diagramma schematico
La mappa dei pin di ciascun connettore è la seguente:
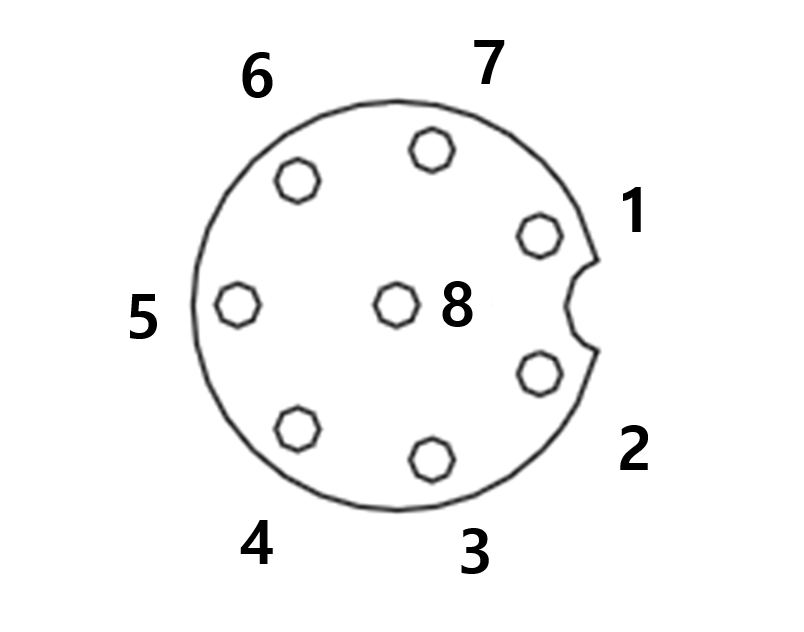
Fare riferimento alla tabella riportata di seguito per la configurazione i/o dettagliata fornita dal connettore X1.
Impostazione X1
No | Tipo di segnale | Descrizione |
|---|---|---|
1 | Ingresso digitale 1 | PNP (tipo sorgente, predefinito) |
2 | Uscita digitale 1 | Impostato su PNP (tipo sorgente, predefinito) o NPN (tipo di dissipatore) |
3 | Uscita digitale 2 | Impostato su PNP (tipo sorgente, predefinito) o NPN (tipo di dissipatore) |
4 | Ingresso analogico 1 / RS-485 + | Impostare su tensione (0-10 V) o corrente (4-20 ma, impostazione predefinita) / velocità di trasmissione max 1M |
5 | Potenza | Impostare l'alimentazione interna su +24V (impostazione predefinita), +12V o 0V |
6 | Ingresso analogico 2 / RS-485 - | Impostare su tensione (0-10 V) o corrente (4-20 ma, impostazione predefinita) / velocità di trasmissione max 1M |
7 | Ingresso digitale 2 | PNP (tipo sorgente, predefinito) |
8 | MASSA |
La potenza iniziale di ingresso/uscita (i/o) della flangia è impostata su 24 V e può essere impostata su 0 V o 12 V.
Fare riferimento alla tabella riportata di seguito per le specifiche di alimentazione dettagliate durante il collegamento i/O.
Parametro | Min | Tipo | Max | Unità |
|---|---|---|---|---|
Tensione di alimentazione (modalità 12 V) | 11,4 | 12 | 12,6 | V |
Tensione di alimentazione (modalità 24 V) | 22,8 | 24 | 25,2 | V |
Corrente di alimentazione | - | - | 1,5 | A. |
Avvertenza
Posizionare l'attrezzo e la pinza in modo che non causino pericoli quando l'alimentazione viene interrotta.
(ad esempio, il pezzo che cade dall'utensile)Il terminale N. 5 di ciascun connettore emette sempre 24 V mentre il robot è alimentato, quindi assicurarsi di interrompere l'alimentazione al robot quando si configura l'utensile e la pinza.
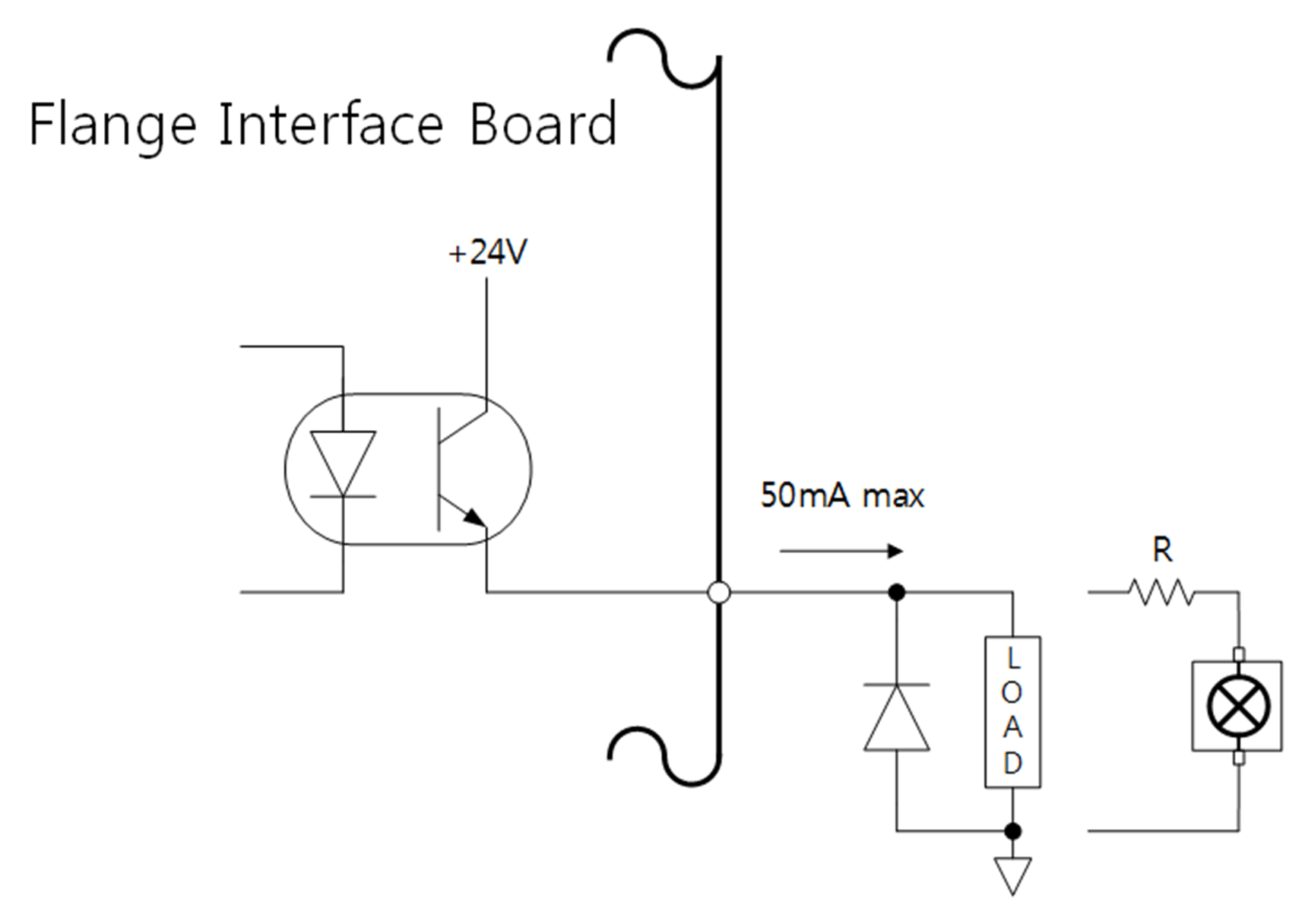
Specifiche uscita digitale flangia
L'uscita digitale della flangia è una specifica PNP e l'uscita del fotoaccoppiatore è impostata nell'uscita.
Il canale di uscita corrispondente diventa +24V quando viene attivata l'uscita digitale. Quando l'uscita digitale è disabilitata, lo stato del canale di uscita corrispondente è aperto (flottante).
Le specifiche elettriche dell'uscita digitale sono le seguenti:
Parametro | Min | Tipo | Max | Unità |
|---|---|---|---|---|
Tensione durante l'azionamento di 10 ma | 23 | - | - | V |
Tensione durante la guida di 50 ma | 22,8 | - | 23,7 | V |
Corrente durante la guida | 0 | - | 50 | Ma |
L'impostazione è stata modificata come segue dall'11 aprile 2024
Le uscite Ou digitali supportano due diverse modalità:
Modalità | Attivo | Inattivo |
|---|---|---|
PNP (tipo sorgente, predefinito) | Alto | Aperto |
NPN (tipo a lavandino) | Basso | Aperto |
La potenza iniziale di ingresso/uscita (i/o) della flangia è impostata su 24 V e può essere impostata su 0 V o 12 V.
Il canale di uscita corrispondente diventa ++12V o ++24V quando l'uscita digitale è attivata.
Quando l'uscita digitale è disabilitata, lo stato del canale di uscita corrispondente è aperto (flottante).
Le specifiche elettriche dell'uscita digitale sono le seguenti:
Parametro | Min | Tipo | Max | Unità |
|---|---|---|---|---|
Tensione durante la guida in modalità 12 V. | 11,4 | 12 | 12,6 | V |
Tensione durante la guida in modalità 24 V. | 22,8 | 24 | 25,2 | V |
Corrente durante la guida | 0 | - | 50 | Ma |
Attenzione
L'uscita digitale non è soggetta a limitazioni di corrente. Il mancato rispetto delle specifiche sopra indicate durante il funzionamento può causare danni permanenti al prodotto.
La figura riportata di seguito è un esempio di configurazione di un'uscita digitale, quindi fare riferimento ad essa durante il collegamento dell'utensile e della pinza.
Assicurarsi di scollegare l'alimentazione dal robot durante la configurazione del circuito.
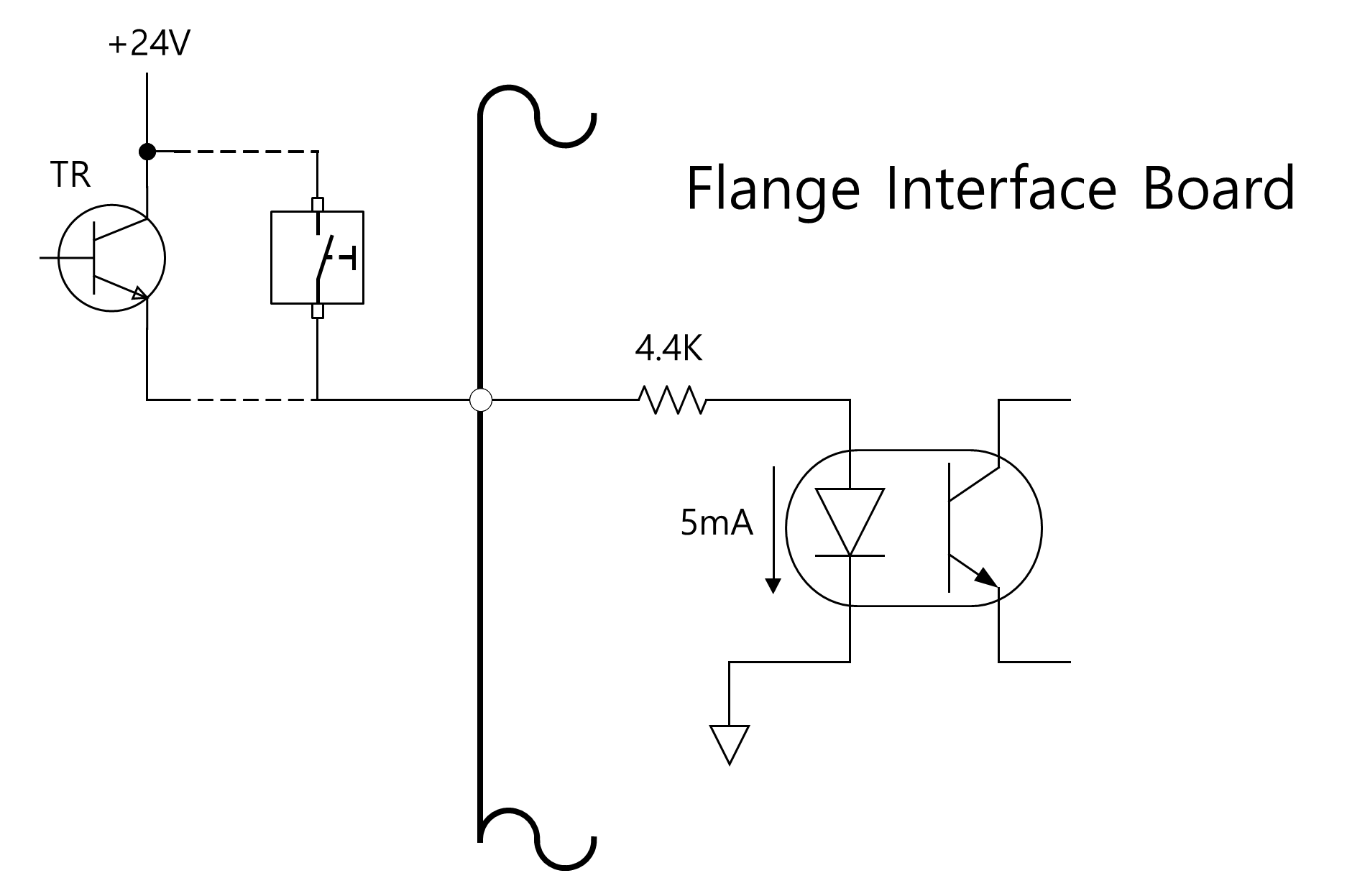
Specifiche ingresso digitale flangia
L'ingresso digitale flangia è dotato di un ingresso accoppiatore fotografico.
La corrente basata sull'ingresso a 24 V è limitata a 5 ma dalla resistenza interna.
Le specifiche elettriche dell'ingresso digitale sono le seguenti:
Parametro | Min | Tipo | Max | Unità |
|---|---|---|---|---|
Tensione di ingresso | 0 | - | 26 | V |
Logico alto | 4,4 | - | - | V |
Logicamente basso | 0 | - | 0,7 | V |
Resistenza in ingresso | - | 4,4k | - | Ω |
Attenzione
La figura riportata di seguito è un esempio di configurazione di un ingresso digitale, quindi fare riferimento ad esso durante il collegamento di un dispositivo di input.
Assicurarsi di scollegare l'alimentazione dal robot durante la configurazione del circuito.
Specifiche ingresso analogico flangia
Riceve segnali di tensione o corrente da dispositivi esterni.
L'ingresso analogico può essere impostato su tensione (0-10 V) o corrente (4-20 ma).
Le specifiche elettriche sono riportate di seguito.
Parametro | Min | Tipo | Max | Unità |
|---|---|---|---|---|
Tensione di ingresso in modalità tensione | 0 | - | 10 | V |
Corrente di ingresso in modalità corrente | 4 | - | 20 | Ma |
Risoluzione | - | 12 | - | bit |