
CONTROLLER DC (CS-12P)
Introduzione al prodotto (CS-12P)
Nome di ciascuna parte e funzioni
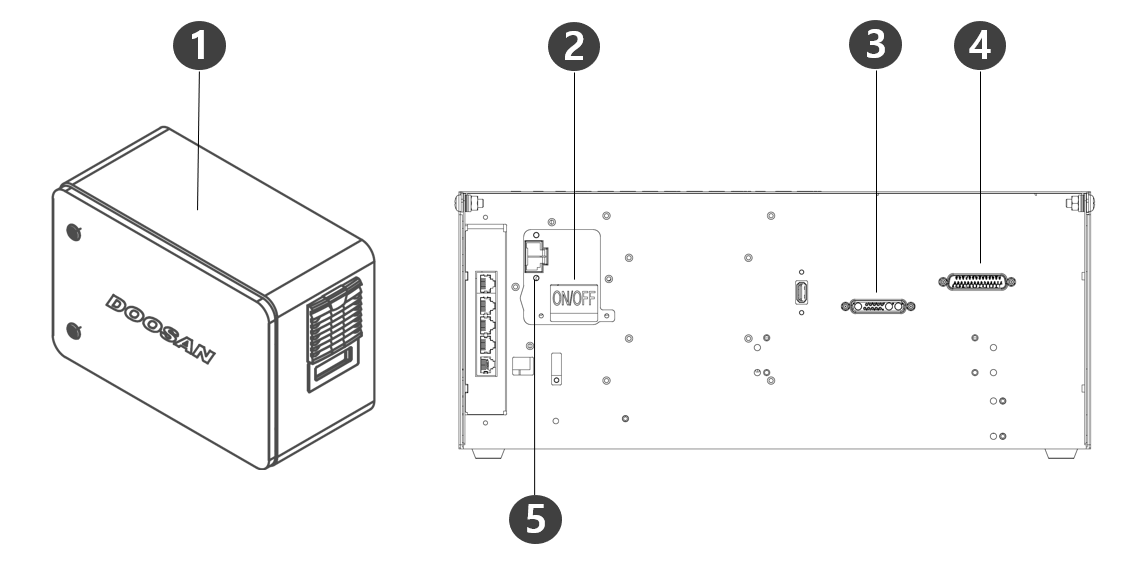
No. | Elementi | Descrizione |
1 | Terminale di collegamento i/o (interno) | Può essere collegato a controller o periferiche di altri robot. |
2 | Interruttore di alimentazione | Utilizzato per ATTIVARE/disattivare l'alimentazione principale del controller . |
3 | Teach pendant Cable Connection Terminal | Utilizzato per collegare il cavo del teach pendant al controller. |
4 | terminale di collegamento del cavo del robot | Utilizzato per collegare il cavo del robot al controller. |
5 | Terminale di collegamento dell'alimentazione | Utilizzato per collegare l'alimentazione del controller. |
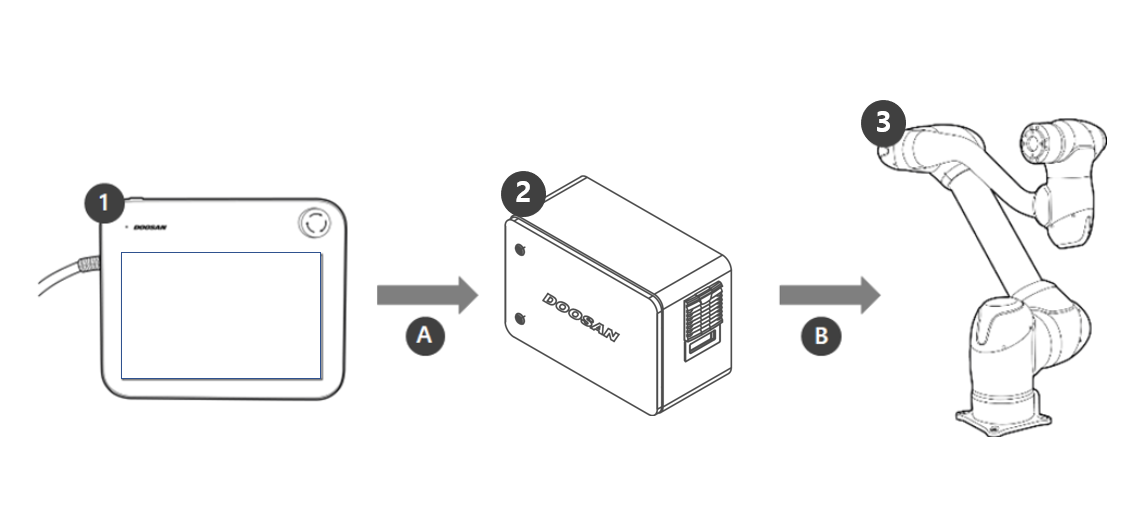
Configurazione del sistema
No. | Nome | Descrizione |
|---|---|---|
1 | Teach pendant | Questo dispositivo gestisce l'intero sistema ed è in grado di insegnare le posizioni specifiche del robot o di configurare le impostazioni relative ai manipolatori e ai controller. |
2 | Centralina | Controlla il movimento del robot in base alla posa o al movimento impostato dal teach pendant. È dotato di varie porte i/o che consentono il collegamento e l'uso di varie apparecchiature e dispositivi. |
3 | Manipolatore | Si tratta di un robot collaborativo industriale in grado di eseguire attività di trasporto o assemblaggio con vari strumenti. |
A. | Comando/monitoraggio | |
B | Alimentazione/rete |
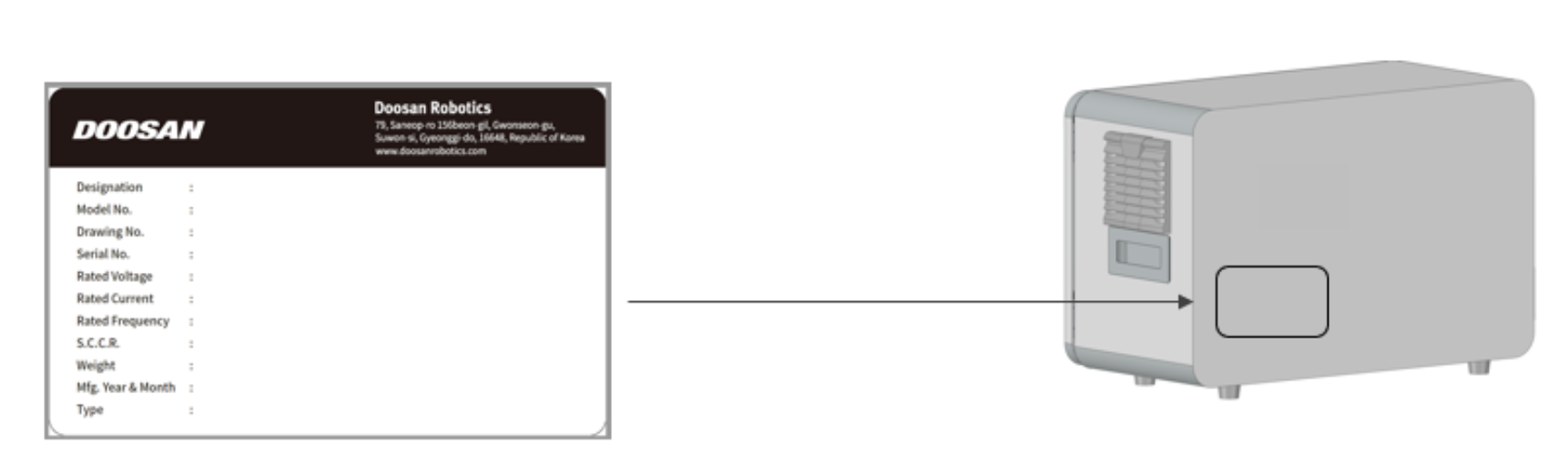
Targhetta ed etichetta
Installazione (CS-12P)
Precauzioni durante l'installazione
Attenzione
Prima di installare il controller, assicurarsi che vi sia spazio sufficiente. Se lo spazio non è sufficiente, il controller potrebbe essere danneggiato o il cavo del manipolatore o del teach pendant potrebbe essere in corto.
Controllare l'alimentazione in ingresso quando si collega l'alimentazione al prodotto. Se l'alimentatore di ingresso collegato è diverso dall'ingresso di potenza nominale (60 V CC), il prodotto non funziona correttamente o il controller potrebbe danneggiarsi.
Ambiente di installazione
Durante l'installazione del controller, considerare quanto segue.
Prima di installare il controller, assicurarsi che vi sia spazio sufficiente.
La centralina deve essere fissata.
Assicurarsi che nessun componente non sia fissato nel veicolo mobile.
Installazione dell'hardware
Installare il robot, il controller e il teach pendant, i componenti chiave del sistema e alimentarli prima di azionare il manipolatore. Le istruzioni per l'installazione di ciascun elemento sono le seguenti:
Collegamento del manipolatore al controller
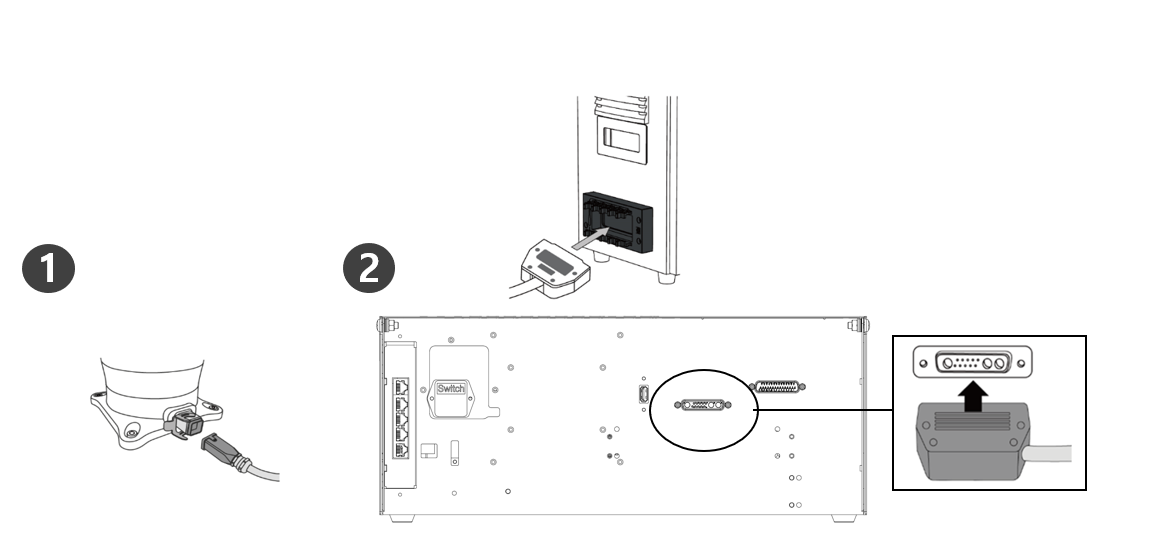
Descrizione | |
|---|---|
1 | Collegare il cavo del manipolatore alla centralina e posizionare un anello di fissaggio
|
2 | Collegamento del cavo di collegamento del manipolatore all'estremità opposta del controller
|
Attenzione
Non scollegare il cavo del manipolatore mentre il robot è acceso. Ciò potrebbe causare il malfunzionamento del robot.
Non tentare di apportare modifiche o prolunghe al cavo del manipolatore.
Quando si installa il controller sul pavimento, fissare almeno 50 mm di spazio libero su ciascun lato per garantire un'adeguata ventilazione.
Assicurarsi di bloccare correttamente i connettori prima di accendere il controller.
Nota
Quando si configura il sistema, si consiglia di installare un riduttore di rumore per evitare effetti sonori e malfunzionamenti del sistema.
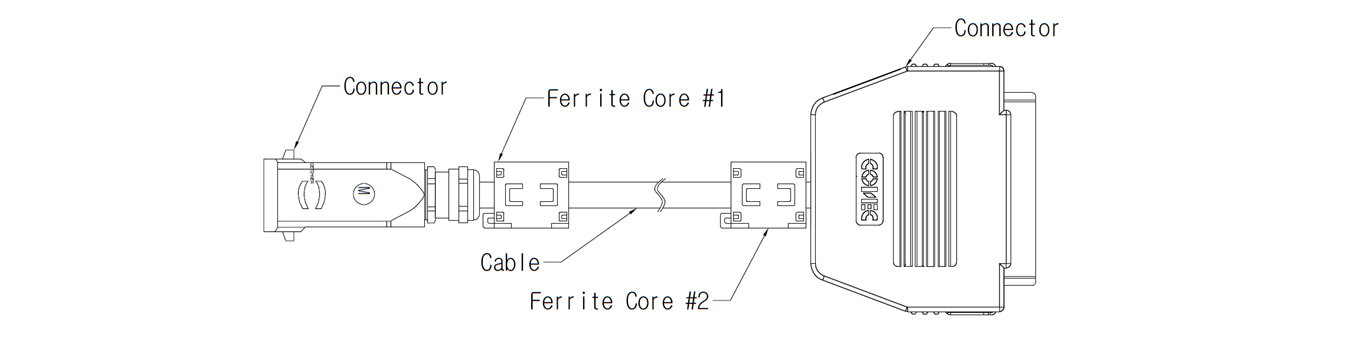
Se il controller è influenzato dal rumore generato dalle onde elettromagnetiche, è necessario installare un nucleo di ferrite per garantire il normale funzionamento. La posizione di installazione è la seguente:
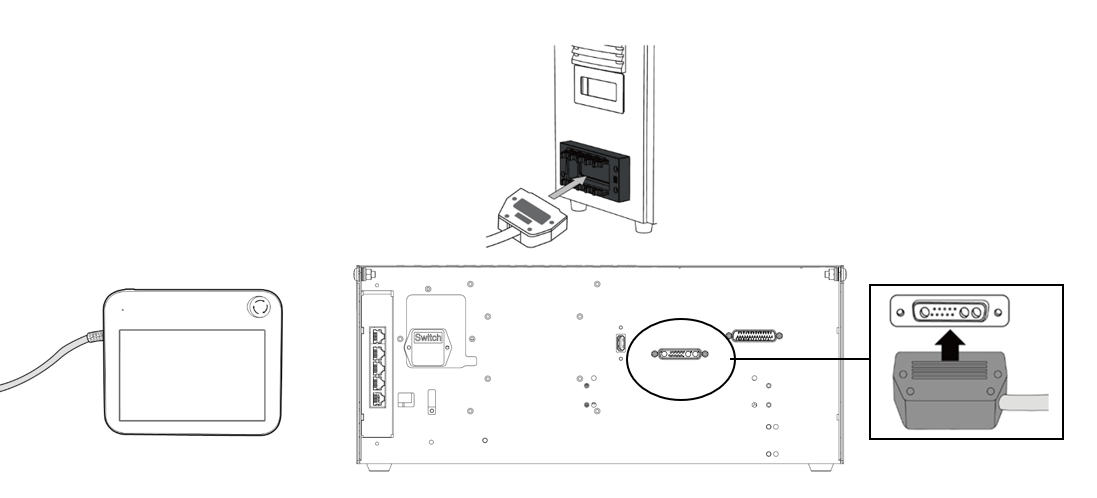
Collegare il controller al teach pendant
Collegare il cavo del teach pendant ai collegamenti corrispondenti sul controller finché non scatta in posizione e assicurarsi che il cavo sia collegato saldamente.
Attenzione
Quando si collega il cavo, controllare la forma del collegamento prima di collegarlo in modo che il perno non si pieghi.
Se il teach pendant viene utilizzato appeso al veicolo mobile o al controller, fare attenzione a non inciampare sui cavi di collegamento.
Fare attenzione a non far entrare in contatto il controller, il teach pendant e il cavo con l'acqua.
Non installare il controller e il teach pendant in ambienti polverosi o umidi.
I controller e la lampada a sospensione intelligente non devono mai essere esposti a ambienti polverosi di grado superiore a IP20. Prestare particolare attenzione in ambienti con polvere conduttiva.
Nota
Quando si configura il sistema, si consiglia di installare un riduttore di rumore per evitare effetti sonori e malfunzionamenti del sistema.
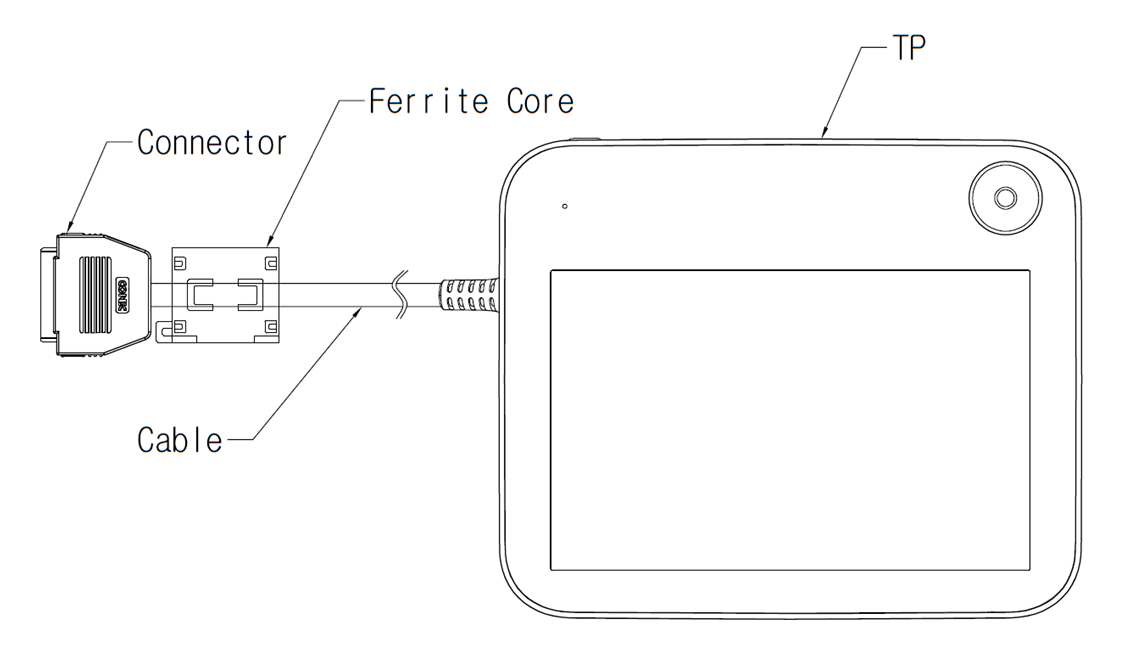
Se il teach pendant è influenzato dal rumore generato dalle onde elettromagnetiche, è necessario installare un nucleo di ferrite per garantire il normale funzionamento. La posizione di installazione è la seguente:
Posizionamento del cavo del manipolatore e del cavo del teach pendant
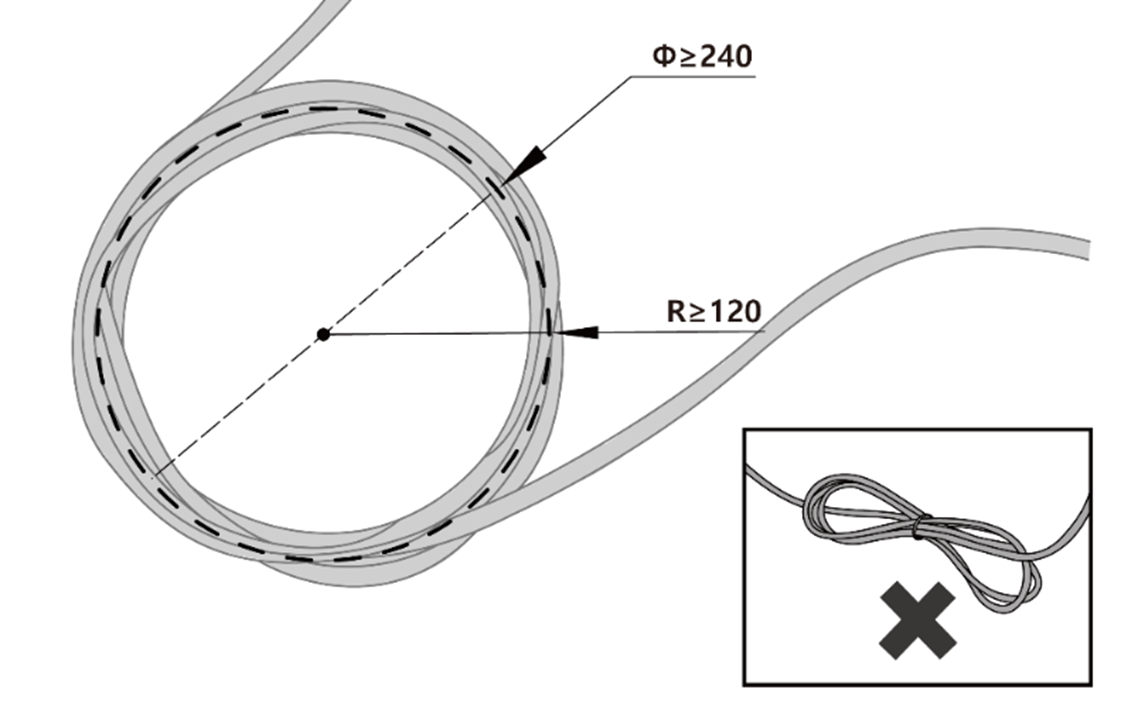
Assicurarsi che il manipolatore e il raggio di curvatura del cavo del teach pendant siano maggiori del raggio di curvatura minimo (120 mm).
Attenzione
Assicurarsi che il raggio di curvatura tra il cavo del teach pendant e il connettore del teach pendant sia maggiore del raggio di curvatura minimo (120 mm).
Se il raggio di curvatura è inferiore al raggio di curvatura minimo (120 mm), si potrebbe verificare lo scollegamento del cavo o il danneggiamento del prodotto.
Negli ambienti in cui può verificarsi rumore elettromagnetico, è necessario installare correttamente il cavo per evitare malfunzionamenti.
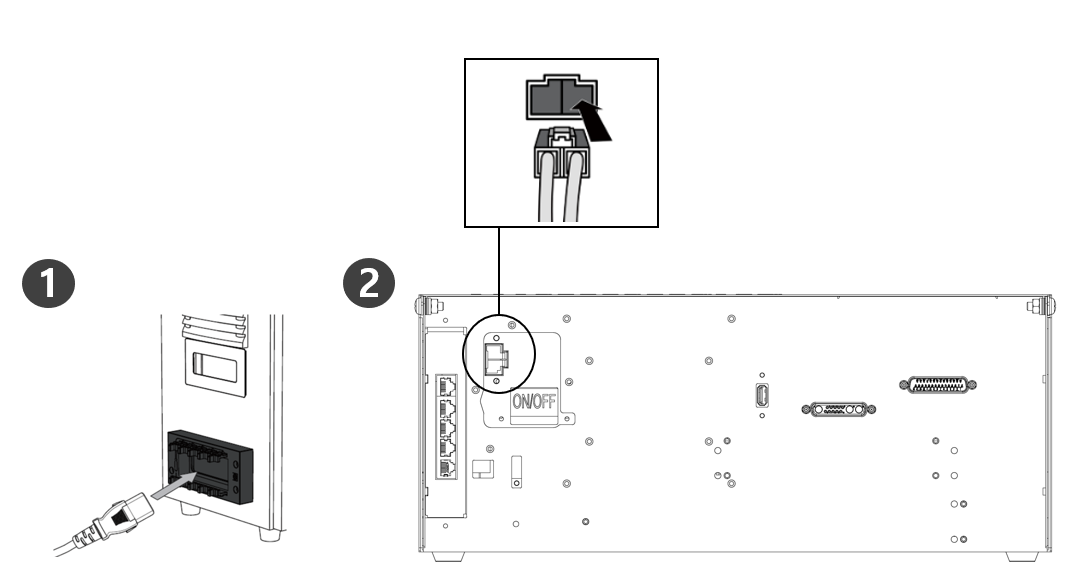
Collegamento dell'alimentazione al controller
Collegare il cavo di alimentazione ai collegamenti corrispondenti sul controller finché non scatta in posizione e assicurarsi che il cavo sia collegato saldamente.
Avvertenza
Assicurarsi che il robot sia correttamente collegato a terra dopo aver collegato i cavi di alimentazione (collegamenti elettrici a massa). Stabilire una massa comune per tutte le attrezzature del sistema con bulloni non utilizzati correlati al simbolo di massa all'interno della centralina. Il conduttore di terra deve soddisfare la corrente nominale massima del sistema.
Proteggere la potenza in ingresso del controller utilizzando dispositivi come un interruttore automatico.
Non modificare o allungare il cavo del robot. Può causare incendi o guasti al controller.
Assicurarsi che tutti i cavi siano collegati correttamente prima di alimentare il controller. Utilizzare sempre il cavo originale incluso nella confezione del prodotto.
Fare attenzione a non collegare la polarità della tensione di ingresso in modo errato.
Nota
Durante la configurazione del sistema, si consiglia di installare un interruttore di alimentazione in grado di spegnere tutti i dispositivi contemporaneamente.
Quando si utilizza un controller per CC, il movimento del robot può essere limitato a seconda del carico e del movimento.
Se la tensione di ingresso è inferiore a 48 V, il movimento del robot può essere limitato in base al carico e al movimento.
L'alimentazione deve soddisfare requisiti minimi quali la messa a terra e gli interruttori automatici. Le specifiche elettriche sono le seguenti:
Parametro | Specifiche |
Tensione di ingresso | 60 V CC |
Corrente di ingresso nominale | 30 A |