Cos'è un robot?
Limiti funzionali di ciascuna serie di robot
Le diverse serie di robot (serie A, AS, e, M/H, P) limitano l'uso delle funzioni come segue:
Basato sulla corrente: Viene utilizzata la corrente del motorino situato su ciascun giunto.
Basato su FTS: Viene utilizzato un FTS (Force Torque Sensor, sensore coppia di forza) situato all'estremità del robot.
Basato su JTS: Viene utilizzato il sensore di coppia del giunto (JTS) situato su ciascun giunto.
Funzioni | Serie a/e (basata sulla corrente) | A serie S (corrente, basata su FTS) | Serie M (basata su JTS) | Serie H (basata su JTS) | Serie P (basata su JTS) |
|---|---|---|---|---|---|
Insegnamento diretto
| O | O (basato sulla corrente) | O | O | O |
Insegnamento diretto
| X | O (basato su FTS) | O | O | O |
Rilevamento collisioni | O | O (basato sulla corrente) | O | O | O |
Misurazione della posa di installazione | X | O (basato su FTS) | O | X(il robot può essere installato solo sul pavimento) | X(il robot può essere installato solo sul pavimento) |
Misurazione del peso dell'utensile | X | O (basato su FTS) | O | O | O |
Misurazione del peso del pezzo | X | O (basato su FTS) | O | O | O |
Funzione antisbandamento | X | X | O | O | O |
Controllo della forza | O (impostazione disponibile solo in tre direzioni di traslazione, esclusa la rotazione) | O (basato su FTS) | O | O | O |
Controllo della conformità | O (impostazione disponibile solo in tre direzioni di traslazione, esclusa la rotazione) | O (basato su FTS) | O | O | O |
Limiti funzionali del monitoraggio della forza per ciascuna serie di robot
Il teach pendant e DART-Studio possono essere utilizzati per monitorare i dati di forza. Il comando DRL (check_force_condition()) può essere utilizzato anche per monitorare esternamente i dati di forza.
Se la modalità di pallettizzazione è impostata su "ON": Sono disponibili le stesse funzioni di controllo/monitoraggio fornite nello stato OFF, ad eccezione dei robot serie H, P.
Funzioni | Serie a/e (basata sulla corrente) | A serie S (basata sulla corrente e FTS) | Serie M (basata su JTS) | Serie H (basata su JTS) | Serie P (basata su JTS) |
|---|---|---|---|---|---|
Controllo della forza | O (impostazione disponibile solo in tre direzioni di traslazione, esclusa la rotazione) | O (basato su FTS) | O | O | O |
O (se la modalità di pallettizzazione è impostata su "ON": Uscita controllo forza limitata (base Rx, orientamento Ry) 1)) | O (se la modalità di pallettizzazione è impostata su "ON": Uscita controllo forza limitata (base Rx, orientamento Ry) 1)) | ||||
Controllo della conformità | O (impostazione disponibile solo in tre direzioni di traslazione, esclusa la rotazione) | O (basato su FTS) | O | O | O |
O (se la modalità di pallettizzazione è impostata su "ON": Uscita controllo conformità limitata (base Rx, orientamento Ry) 1)) | O (se la modalità di pallettizzazione è impostata su "ON": Uscita controllo conformità limitata (base Rx, orientamento Ry) 1)) | ||||
Monitoraggio della forza (Teach pendant) | X | O (basato su FTS) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (valore di forza di "0" mostrato per la sezione singolarità) |
O (se la modalità di pallettizzazione è impostata su "ON": 4 gradi di libertà previsti per la base (x, y, z, Rz) | O (se la modalità di pallettizzazione è impostata su "ON": 4 gradi di libertà previsti per la base (x, y, z, Rz) | ||||
Monitoraggio della forza (Studio DART) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (basato su FTS) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (valore di forza di "0" mostrato per la sezione singolarità) |
O (se la modalità di pallettizzazione è impostata su "ON": 4 gradi di libertà previsti per la base (x, y, z, Rz) | O (se la modalità di pallettizzazione è impostata su "ON": 4 gradi di libertà previsti per la base (x, y, z, Rz) | ||||
Monitoraggio della forza (Quando si utilizzano i comandi DRL: | O (valore di forza di "0" mostrato per la sezione singolarità) | O (basato su FTS) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (valore di forza di "0" mostrato per la sezione singolarità) | O (valore di forza di "0" mostrato per la sezione singolarità) |
O (se la modalità di pallettizzazione è impostata su "ON": 4 gradi di libertà previsti per la base (x, y, z, Rz) | O (se la modalità di pallettizzazione è impostata su "ON": 4 gradi di libertà previsti per la base (x, y, z, Rz) |
Limite uscita controllo (Rx base, orientamento Ry): I valori di controllo della forza o della conformità corrispondenti ai valori di controllo della forza o della conformità corrispondenti all'orientamento di base Rx, Ry non vengono emessi. L'immissione del valore di controllo della forza o della conformità dell'asse pertinente (base Rx, Ry) verrà ignorata come "0".
Panoramica della singolarità
La singolarità in un robot multigiunto si riferisce a una posizione (o punto in un robot multigiunto si riferisce a una posizione (o punto) in cui il robot ha difficoltà a calcolare la posa successiva durante lo spostamento. I robot multigiunto calcolano ogni angolo del giunto durante il movimento in base all'estremità del robot
Ad esempio, nella Fig. 1 di seguito, quando il robot si sposta verso il punto rosso, non sarà in grado di determinare se spostare le articolazioni per impostare la posa A o la posa B come mostrato nella Fig. 2. Questa posizione (o punto) è chiamata singolarità.
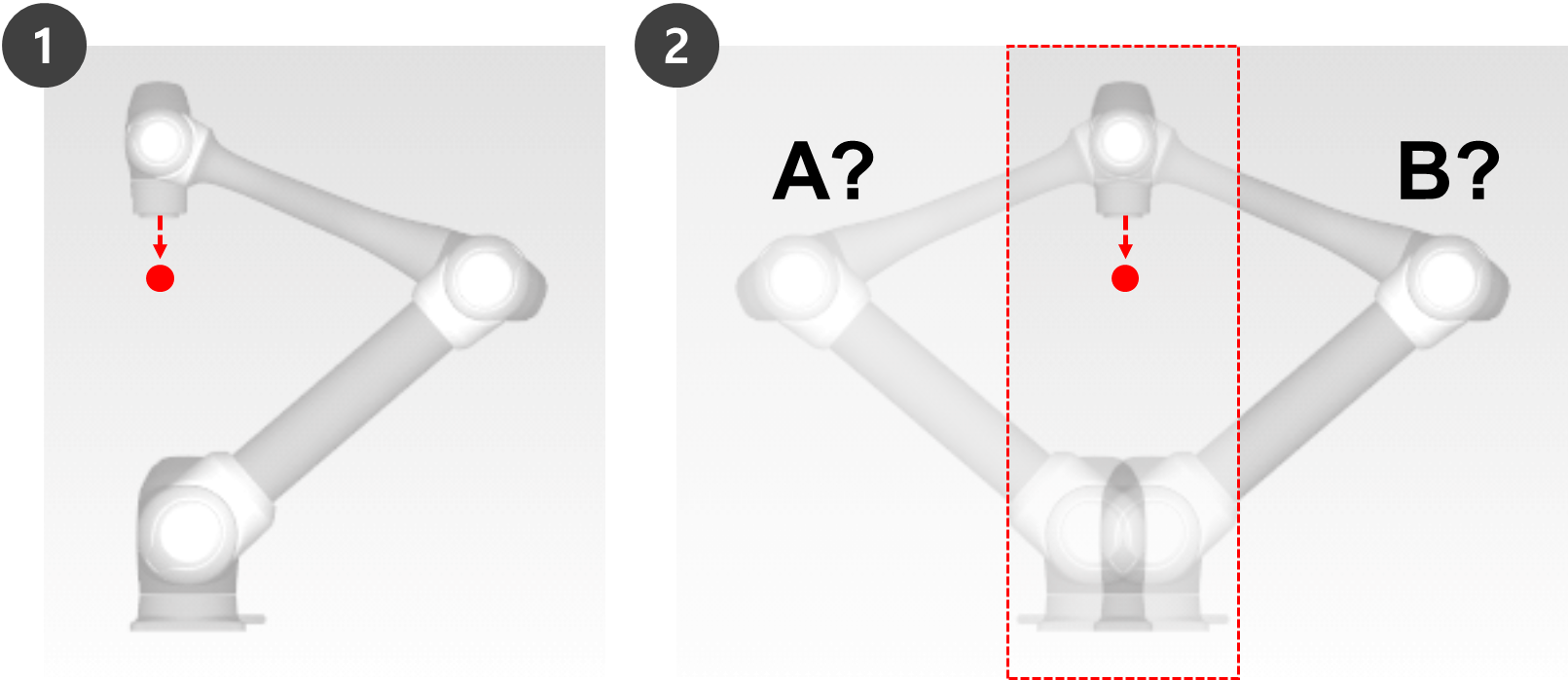
Vicino a una singolarità, il movimento del robot non è fluido in termini di piano, punto e linea, il movimento lineare finale del robot potrebbe non essere mantenuto e l'errore di posizione durante il controllo potrebbe aumentare. La singolarità si verifica in 3 casi, come mostrato nella figura seguente, anche quando i giunti del robot formano una linea.
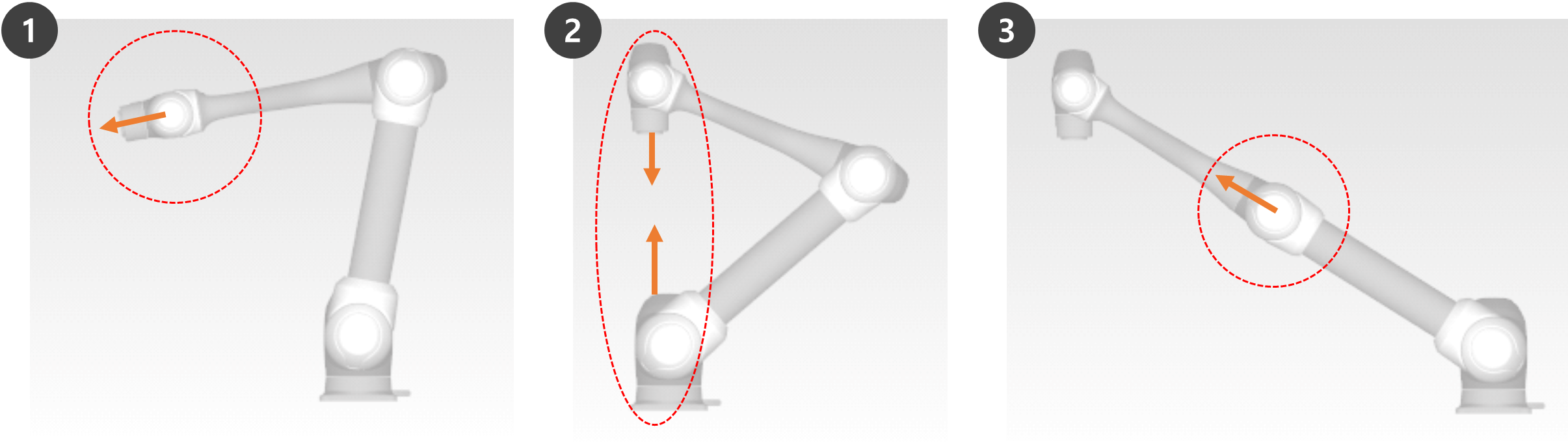
Singolarità polso: Quando il polso del robot forma una linea quando l'asse 5 si avvicina a 0°
Rispetto a un braccio umano, gli assi 4, 5 e 6 corrispondono all'articolazione del polso.
Singolarità spalla: Quando gli assi 1 e 6 sono sulla stessa linea
Rispetto a un braccio umano, gli assi 1 e 2 corrispondono all'articolazione della spalla.
Singolarità gomito: Quando il robot forma una linea quando l'asse 3 si avvicina a 0°
Rispetto a un braccio umano, l'asse 3 corrisponde al gomito.
Attenzione
Le operazioni manuali e automatiche che si spostano con la rotazione dei giunti non sono influenzate dalla singolarità.
Movimento attività, comando MoveL, ecc.
La singolarità si verifica solo durante il funzionamento manuale e automatico, quando il robot termina di eseguire un movimento lineare.
Movimento articolare, comandi MoveJ, ecc.
Nella zona di singolarità, il controllo della forza o il controllo della conformità non sono disponibili.
Poiché la velocità di rotazione di alcuni assi aumenta rapidamente quando un movimento lineare supera una singolarità, è possibile che si verifichi una violazione del limite di velocità del giunto o un'infrazione del limite dell'angolo del giunto.
Come evitare la singolarità
I robot Doosan Robotics offrono opzioni per evitare singolarità durante il controllo del movimento. Tuttavia, si consiglia di configurare un'operazione che non crei eccezioni utilizzando comandi di movimento dei giunti come MoveJ nelle zone di singolarità.
Di seguito sono riportate le opzioni di esclusione della singolarità fornite da Doosan robot:
Esclusione automatica: Esegue il movimento evitando le singolarità. Tuttavia, il movimento del robot potrebbe differire dal percorso previsto.
Priorità percorso: Mantiene il percorso e la velocità, ma può arrestarsi a causa di un errore vicino a una singolarità.
Velocità variabile: Mantiene il percorso, ma decelera vicino a una singolarità.
Panoramica dell'angolo di Eulero
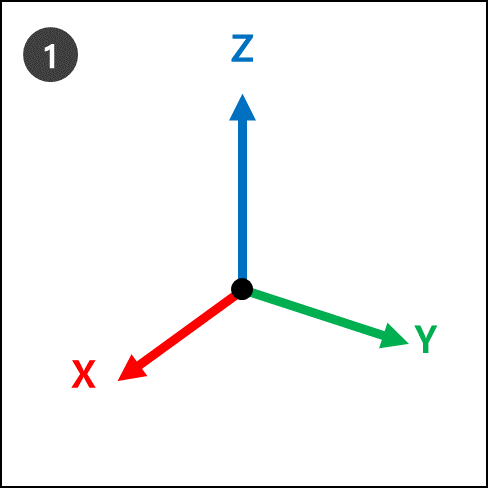
Angolo di Eulero è un modo per esprimere gli angoli degli assi X, Y e Z, perpendicolari tra loro nella direzione dell'oggetto. A, B e C si riferiscono agli angoli di rotazione sequenziali. Ogni produttore di robot definisce questo ordine di rotazione A, B e C in modo diverso, come Rz-Ry-Rz, Rz-Ry-Rx o Rx-Ry-Rz.
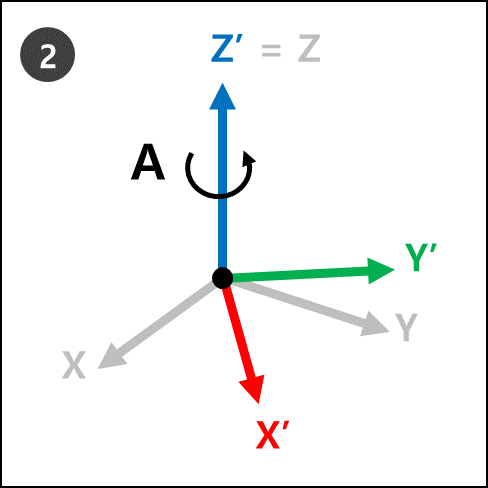
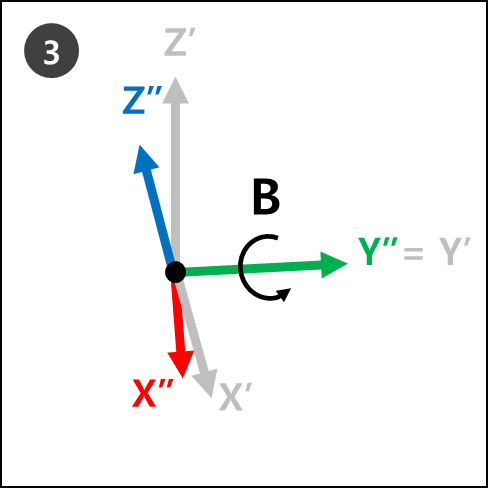
Ad esempio, Rz-Ry-Rx. Qui, Rz significa la rotazione nell'asse Z, Ry indica la rotazione nell'asse Y e Rx indica la rotazione nell'asse X. RZ può essere espresso come angolo A, Ry come angolo B e Rx come angolo C per indicare la direzione di rotazione corrente di un oggetto. Si noti che una volta effettuata la rotazione in direzione dell'asse Z dalle coordinate, le rotazioni saranno effettuate in base alle nuove coordinate.
Questo può essere visualizzato con i passaggi da 1 a 4.
 |
 |
 |
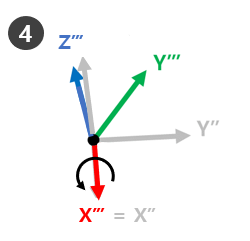 |
Le nuove coordinate (Z’’’, Y’’’, X’’’ del punto 4 si riferiscono alla rotazione corrente del robot quando vengono applicati gli angoli di Eulero A, B e C.
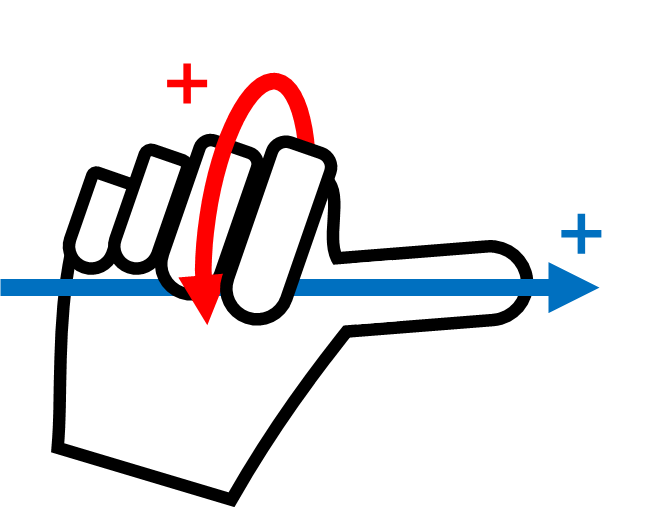
Questo può essere facilmente visualizzato con la mano destra. Mettiti in posa con la mano destra. Questa è chiamata regola destra e facendo in modo che il pollice (asse X), il dito indice (asse Y) e il dito medio (asse Z) siano perpendicolari l'uno all'altro creeranno coordinate costituite da assi X, Y e Z.
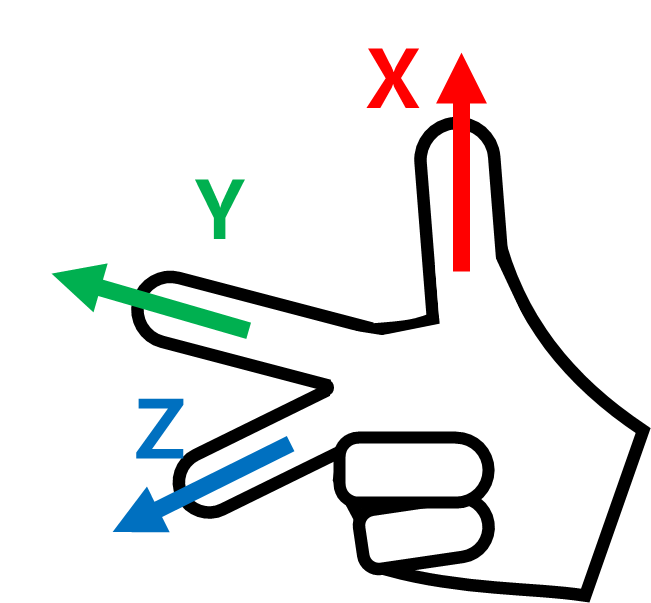
Quindi, eseguire la posa cartesiana della regola destra e le rotazioni Rz, Ry e Rx in ordine sequenziale.
RZ: Ruotare il dito medio (asse Z) di gradi.
Ry: Ruotare il dito indice (asse Y) di B gradi.
RX: Ruotare il pollice (asse X) di C gradi.
Nota
La direzione di rotazione + della direzione di rotazione + di A, B e C è la direzione di quattro dita tranne il pollice, quando il pollice è rivolto verso la direzione + e le quattro dita sono bloccate. Questa è detta legge della vite in senso orario.