
Modulo di ripristino
Modulo di ripristino: Se si verifica un errore con una violazione continua della sicurezza o se è necessario imballare un robot per il trasporto, l'utente può utilizzare la modalità di recupero di sicurezza per configurare la posizione e l'angolo del robot.

Per accedere al modulo di ripristino, toccare il pulsante di ripristino situato nella parte inferiore.
Ripristino del software: Nello stato servoazionamento disattivato, se si verifica una situazione di errore di violazione della sicurezza causata da violazioni di sicurezza relative alla posizione, ad esempio l'uscita del robot dall'area operativa o la violazione delle aree interdette, oppure se viene applicata una forza continua quando il robot viene arrestato a causa di una collisione con un oggetto fisso, non è possibile impostare servoazionamento attivo o scatto anche quando si tenta di ripristinare lo stato normale del robot utilizzando lo scatto o il programma. In questi casi, la modalità di ripristino software viene utilizzata per ripristinare il funzionamento normale del robot.
Modalità di imballaggio: Per il confezionamento e il trasporto del robot, è possibile impostarlo su valori predefiniti (che superano il normale limite dell'angolo di funzionamento) per il trasporto.
Se il servomotore è abilitato quando viene avviato il modulo Recovery (Ripristino), viene visualizzata la seguente finestra a comparsa e il servomotore viene disattivato automaticamente.
Utilizzo della modalità di ripristino software
Modalità ripristino software
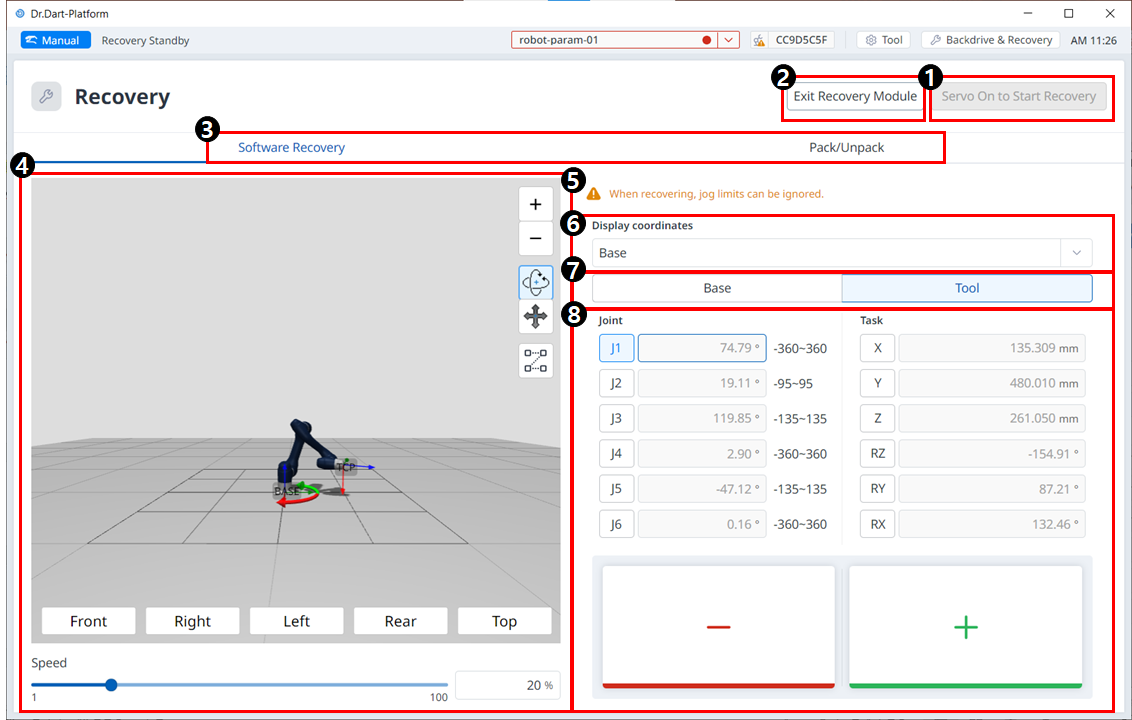
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Servo ON per avviare il ripristino | Si tratta di un pulsante che consente di attivare il servomeccanismo prima di entrare in modalità Recovery (recupero). |
| 2 | Uscire dal ripristino | Questo pulsante consente di uscire dal modulo di ripristino. |
| 3 | Intestazione | Questa sezione consente di selezionare la modalità Ripristino software o la modalità pacchetto/Disimballaggio. |
| 4 | Simulazione 3D. | Quest'area consente di visualizzare in anteprima una simulazione 3D dei valori impostati. |
| 5 | Messaggio di avvertimento | Questo spiega le precauzioni. |
| 6 | Visualizza coordinate | Qui è possibile impostare la coordinata in base alla base o al mondo. |
| 7 | Pulsante base/strumento | Qui è possibile impostare il valore in base alla base o allo strumento. |
| 8 | Giunto/mansione | Questa sezione consente di immettere i valori desiderati per far muovere il robot. |
Per utilizzare la modalità di ripristino del software, attenersi alla seguente procedura:
Toccare il menu Recovery (Ripristino ) nel riquadro dell'intestazione. La schermata Ripristino software viene visualizzata automaticamente nella finestra Ripristino.
Toccare ciascun pulsante giunto sul lato destro della schermata Ripristino software e utilizzare
 i pulsanti per impostare la posizione. In alternativa, premere i pulsanti del cockpit per regolare l'angolo del giunto mediante apprendimento diretto.
i pulsanti per impostare la posizione. In alternativa, premere i pulsanti del cockpit per regolare l'angolo del giunto mediante apprendimento diretto.Per le definizioni dei pulsanti nel cockpit, fare riferimento a Cockpit
Le modifiche apportate all'impostazione si riflettono nella finestra di simulazione a sinistra in tempo reale.
Al termine dell'impostazione, toccare il pulsante X in alto a sinistra per chiudere la finestra.
Attenzione
La modalità di riparazione software non è disponibile quando il limite dell'angolo del giunto viene superato di 3 gradi.
Uso di Pack/Unpack
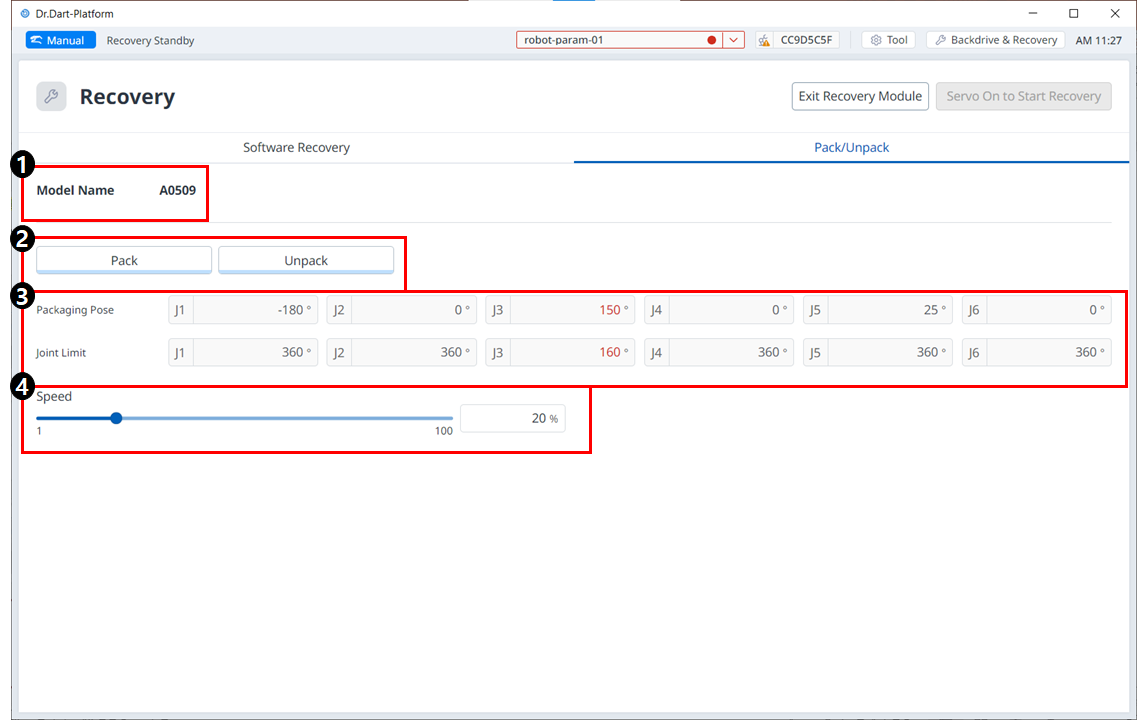
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Nome modello | Viene visualizzato il nome del modello di robot collegato. |
| 2 | Pack/Disimballare | È possibile selezionare Pack o Unpack. |
| 3 | Limite di posa/giunto di imballaggio | Vengono visualizzati i valori limite di posa e giunto. |
| 4 | Rapporto di velocità | La velocità della modalità pack o unpack può essere regolata tramite un cursore o un ingresso. |
Per configurare la modalità di imballaggio, attenersi alla seguente procedura:
Toccare il menu Ripristino nel riquadro dell'intestazione.

Selezionare la scheda modalità imballaggio.

Toccare il pulsante Servo On to Start Recovery (attivazione servo per avviare ripristino) per attivare la modalità di imballaggio.

Il robot si sposta automaticamente sulla posa di imballaggio impostata.
Il pulsante Pack consente di portare il robot in posizione Pack e il pulsante Unpack consente di portare il robot in posizione Home predefinita.