
Sposta pannello
Menu
Elementi | Descrizione | |
|---|---|---|
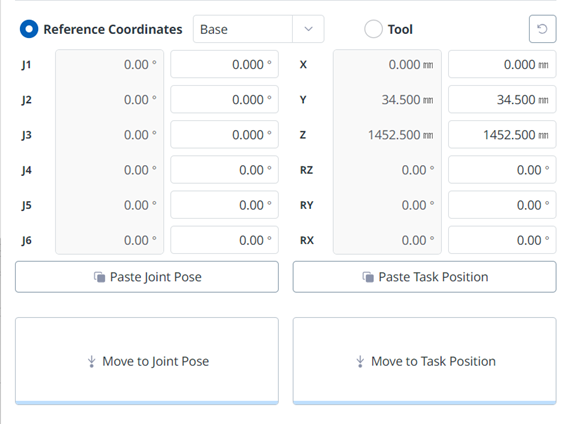
16 | Selezionare il sistema di coordinate di riferimento | Selezionare il sistema di coordinate di riferimento da utilizzare per le coordinate dell'attività nella Figura 18. È possibile scegliere le coordinate base, mondo o utente. |
17 | Postura articolare | Visualizza la postura corrente del robot e la postura articolare target. |
18 | Postura attività | Visualizza la postura corrente del robot e la postura dell'attività target che si adattano al sistema di coordinate di riferimento selezionato. |
19 | Incollare la postura del giunto | Incollare il valore di postura copiato negli Appunti nel pannello di postura del giunto. |
20 | Incolla postura attività | Incollare il valore di postura copiato negli Appunti nel pannello postura attività. |
21 | Pulsante di spostamento giunto | Questo pulsante fa sì che il robot si sposti verso la postura del giunto target. |
22 | Pulsante di spostamento attività | Questo pulsante fa sì che il robot si sposti sulla postura dell'attività target. |
Impostazione dell'angolo da spostare
Per spostare il robot a un'angolazione specifica, attenersi alla seguente procedura:
Selezionare la scheda Sposta.
Immettere l'angolo target del giunto del robot. (J4 disabilitato per i modelli serie P)
Attivare la modalità reale.
Toccare e tenere premuto il pulsante Move to corresponding Joint pose (Sposta per giunti) per regolare l'angolo del giunto del robot.
Impostazione delle coordinate di riferimento di base da spostare
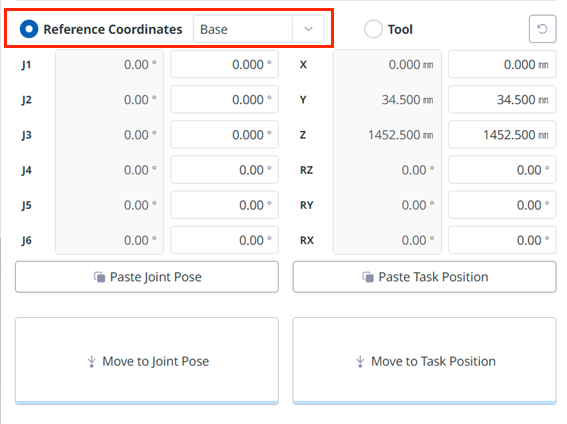
Per spostare il robot in base alle coordinate di base, attenersi alla seguente procedura:
Selezionare la scheda Sposta e coordinate di riferimento.
Selezionare la coordinata di visualizzazione come base.
Toccare e tenere premuto il pulsante Sposta su posa attività corrispondente per spostarsi sulle coordinate impostate.
Impostazione delle coordinate mondiali coordinate di riferimento da spostare
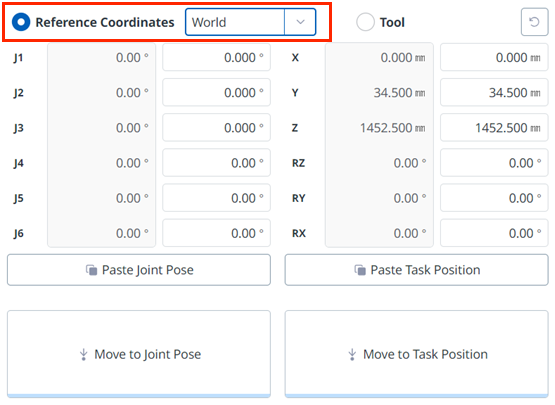
Per spostare il robot in base alle coordinate mondiali, attenersi alla seguente procedura:
Selezionare la scheda Sposta e coordinate di riferimento.
Selezionare mondo come coordinate di visualizzazione e selezionare la scheda mondo.
Configurare la posa da spostare facendo riferimento alle coordinate mondiali.
Toccare e tenere premuto il pulsante Sposta su posa attività corrispondente per spostarsi sulle coordinate impostate.
Impostazione delle coordinate da spostare in base allo strumento
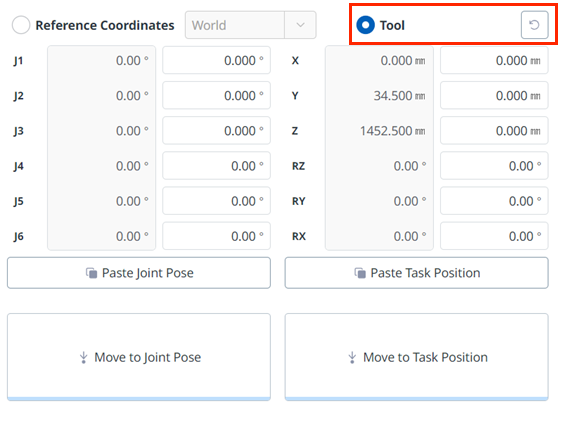
Per spostare il robot in base alle coordinate utensile, attenersi alla seguente procedura:
Selezionare la scheda Sposta e la scheda strumento.
Configurare la posa da spostare facendo riferimento allo strumento.
Toccare e tenere premuto il pulsante Sposta su posa attività corrispondente per spostarsi sulle coordinate impostate.