
Modulo JOG Plus
L'utente può selezionare un metodo di movimento manuale dalla scheda scatto.
Jogging: Sposta il giunto del robot o il TCP sull'asse del giunto o sull'asse delle coordinate selezionato dall'utente
Sposta: Sposta il giunto del robot o il TCP sul punto target immesso dall'utente
Il movimento del robot è di due tipi.
Movimento del giunto: Sposta ogni giunto linearmente con un movimento rotatorio
Movimento attività: Sposta l'estremità linearmente al punto target
Di seguito viene descritto il metodo per spostare il robot utilizzando il movimento del giunto dalla schermata di avanzamento graduale:
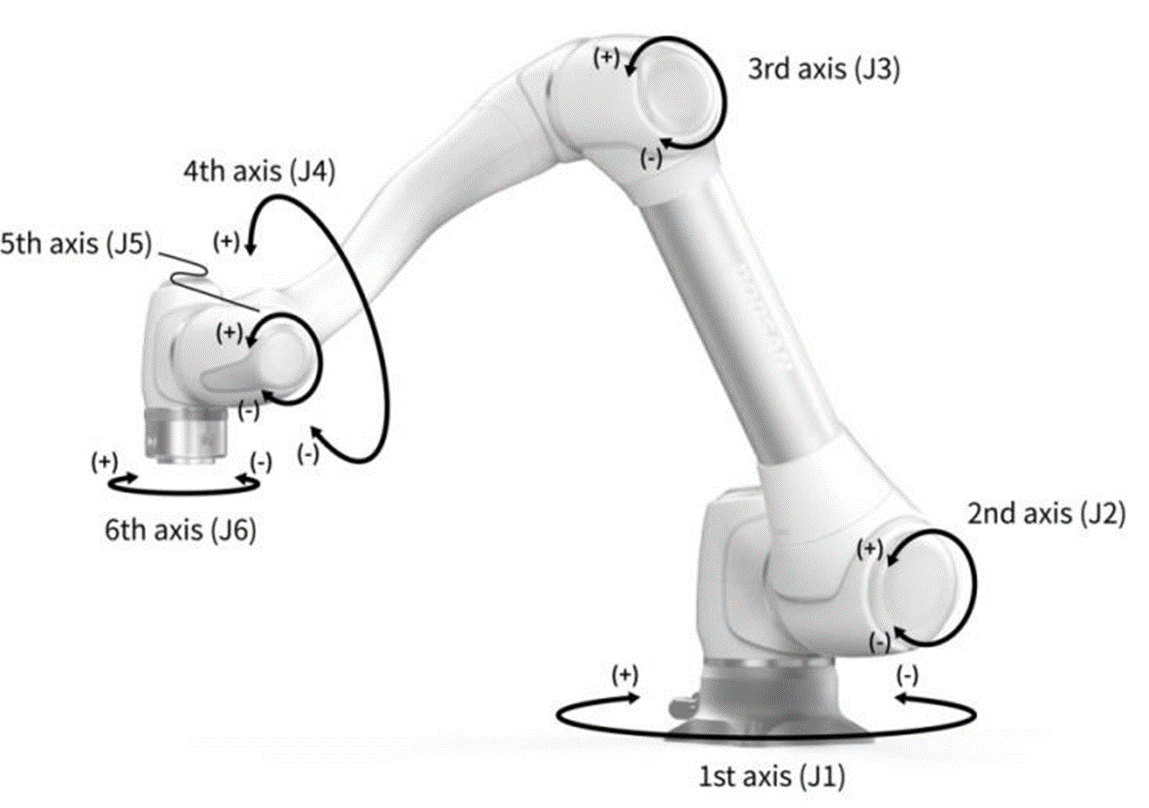
Selezionare la scheda giunto.
Selezionare l'asse da spostare. Ad esempio, è possibile selezionare J1.
Premere il pulsante +/- per spostare il robot. Il robot si muove mentre si preme il pulsante +/- e la posizione corrente viene visualizzata sullo schermo in tempo reale.
Di seguito è riportato il metodo per spostare il robot utilizzando il movimento dell'attività sulla schermata a impulsi:
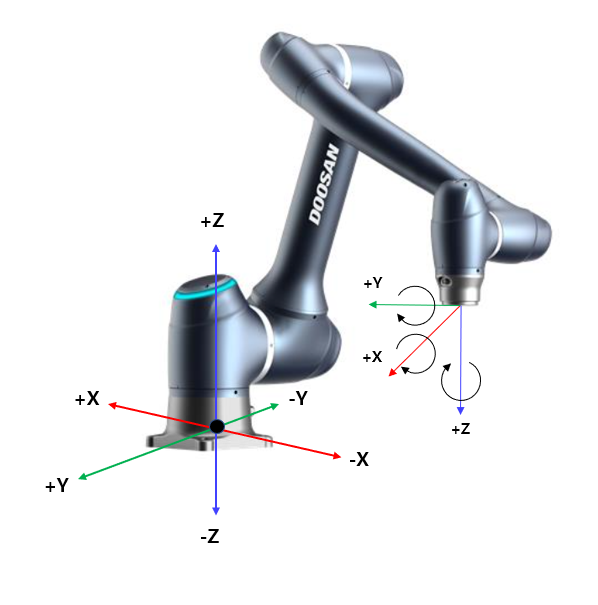
Selezionare le coordinate di base. Il robot può essere spostato in base alle coordinate BASE o alle coordinate UTENSILE.
Selezionare la direzione da spostare. Ad esempio, è possibile selezionare l'asse X.
Premere il pulsante +/- per spostare il robot. Il robot si muove mentre si preme il pulsante +/- e la posizione corrente viene visualizzata sullo schermo in tempo reale.
Per ulteriori informazioni su movimento a scatti, spostamento e allineamento, fare riferimento Pannello Sfalsamento Sposta pannello rispettivamente a pannello a scatti e Sposta pannello.
Nota
Se l'interruttore a bilanciere della modalità effettiva in alto a sinistra della schermata Jog è disattivato, il robot si sposta solo sulla schermata virtuale a sinistra della schermata Jog. Il robot effettivo si sposta se l'interruttore a bilanciere della modalità effettiva è attivato.
Con il modulo Jog Plus, l'utente può esplorare l'intero spazio di lavoro in modalità manuale o impostare lo spazio operativo come spazio operativo del robot. L'angolo di movimento di ciascun asse può essere limitato in base allo spazio operativo selezionato e al limite dell'angolo del giunto dell'impostazione di sicurezza.
Per utilizzare la funzione Jog Plus, toccare il modulo Jog Plus nel menu principale.
La funzione Jog non può essere utilizzata durante lo spegnimento del servomeccanismo .
Il robot viene azionato manualmente nella schermata Jog Plus, quindi si muove solo quando viene premuto il pulsante Jog.
È possibile spostare il robot in base alla posizione corrente nella schermata della scheda Jog Plus.
Il robot può essere spostato configurando l'angolo/le coordinate target nella schermata della scheda Move (Sposta).
È possibile configurare le coordinate di riferimento nella schermata scheda Jog Plus e nella schermata scheda Sposta come giunto o attività.
Nota
Se il robot non può essere navigato perché si trova in uno spazio diverso da quello operativo della modalità Jog Plus, impostare lo spazio operativo del robot su "nessuno" per consentire la navigazione del robot.
Nota
Questo modulo non è disponibile in modalità automatica. Toccare il pulsante di commutazione in basso a destra per renderlo disponibile in modalità Manuale.
L'uso di Job Plus (Jog+) consente di utilizzare la funzione Sfalsamento contemporaneamente mentre si eseguono lavori diversi. Questo può essere utilizzato quando è necessario il controllo manuale per spostare il robot sul punto target durante l'apprendimento.