
Posizione iniziale e cabina di pilotaggio
Posizione iniziale
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Opzione posizione predefinita | Questa è la sezione in cui è possibile selezionare l'opzione posizione predefinita. |
| 2 | Valore di posizione predefinito | Questi sono i valori che corrispondono alla posizione predefinita, tutti 0. |
| 3 | Opzione di posizione personalizzata | Ciò consente di selezionare l'opzione posizione personalizzata. |
| 4 | Valore di posizione personalizzato | È possibile controllare il valore della posizione personalizzata attualmente impostato e la posizione corrente del robot. |
| 5 | Posizione iniziale | Questo pulsante consente di impostare la posizione predefinita o la posizione personalizzata impostata come posizione iniziale. |
| 6 | Messaggio di avvertimento | Prestare attenzione durante la configurazione. |
| 7 | Salva | Questo pulsante consente di salvare i valori di impostazione. |
Avvertenza
Quando un robot o un giunto di un robot viene scambiato, è necessario reimpostare la posizione iniziale personalizzata.
Cabina di pilotaggio
L'apprendimento diretto viene utilizzato per tenere l'estremità del robot con le mani per spingere e tirare il robot fino alla posa desiderata e applicare la posa al movimento attualmente selezionato. Esistono due metodi di insegnamento diretto.
Trasmissione libera: Ogni giunto si sposta nella direzione in cui l'utente ha applicato la forza
Movimento vincolato: L'estremità del robot si sposta o ruota solo nella direzione impostata nel movimento vincolato anche quando la forza viene applicata da una direzione casuale
Freedrive
Quando si preme il pulsante 1, la modalità Freedrive viene attivata, consentendo al robot di muoversi liberamente. Ogni giunto si sposta nella direzione in cui l'utente ha applicato la forza. Il robot non può essere spostato manualmente una volta rilasciato il pulsante.
Durante l'apprendimento diretto, il LED del robot lampeggia in ciano.
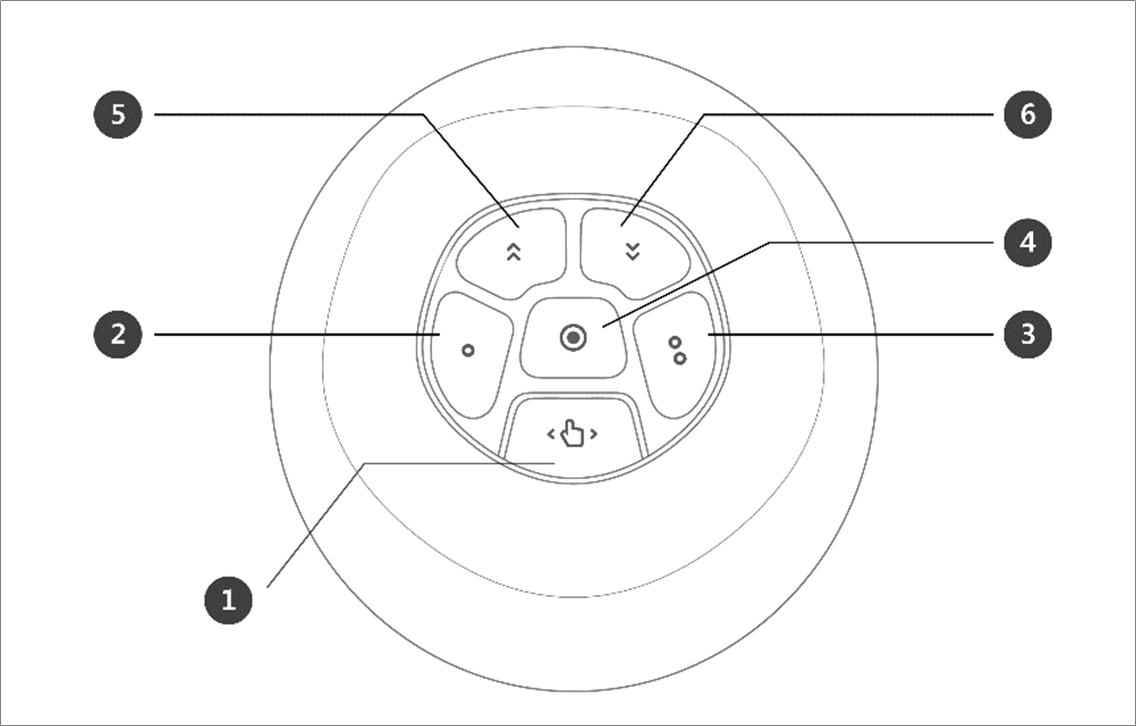
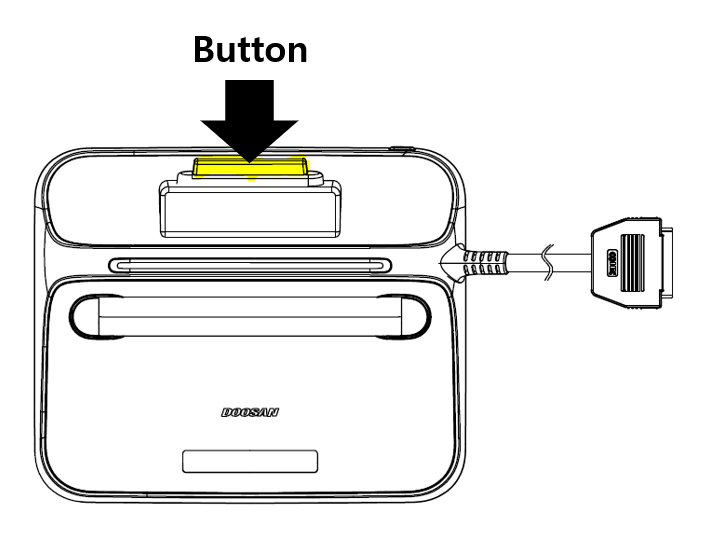
Premendo il pulsante della guida manuale sul retro del teach pendant si attiva la modalità Freedrive, proprio come premendo il pulsante 1, e il robot può essere spostato liberamente.
Movimento vincolato
Quando si premono i pulsanti 2 e 3, l'estremità del robot si sposta solo nella direzione corrispondente alla condizione di vincolo anche quando la forza viene applicata da una direzione casuale. La condizione di vincolo può essere impostata con 2 di 4 delle condizioni nella figura seguente: Asse Z vincolato, fisso piano vincolato, superficie vincolata e direzione vincolata.
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Immagine cockpit | Questa è un'immagine per le impostazioni Cockpit. |
| 2 | Ripristina | Questo pulsante consente di inizializzare i valori impostati. |
| 3 | Impostazione di 1 pulsante | Questa è la sezione in cui è possibile selezionare la funzione da impostare per il pulsante 1. |
| 4 | Impostazione a 2 pulsanti | Questa è la sezione in cui è possibile selezionare la funzione da impostare per il pulsante 2. |
| 5 | Impostazione pulsanti 1+2 | Questa è la sezione in cui è possibile selezionare se abilitare il bloccaggio per i pulsanti 1+2. |
| 6 | Immagine guida | Un'immagine guida per gli elementi di impostazione Cockpit. |
Ottenere lo stato del pulsante Cockpit
L'utente può ottenere informazioni sulla pressione o il rilascio del pulsante Cockpit.
Il robot fornisce la funzione di controllo del pulsante Cockpit, che può essere utilizzato in varie applicazioni.
I "dati di monitoraggio" nell'API di comunicazione forniscono informazioni sul pulsante Cockpit.
Se si preme il pulsante Cockpit del robot o viceversa, è possibile rilevarlo tramite l'API DRL.
DRL API: Get_cockpit_input (fare riferimento al manuale di programmazione).
Parametri: indice (int)
Resi: (int) 1: Premuto (il pulsante è premuto), 0: Rilasciato (il pulsante non è premuto)