
Prova esempi di comando Compliance
Attenzione
Prima di provare il campione, leggere e seguire le precauzioni. Per ulteriori informazioni, fare riferimento ALLA PARTE 1. Manuale di sicurezza.
Nota
Se è presente una coppia esterna superiore alla soglia durante l'abilitazione o la disabilitazione del controllo di conformità, il robot arresta il programma a causa dell'errore JTS (sensore di coppia giunto).
La variazione della rigidità può essere eseguita indipendentemente dalla dimensione della coppia esterna.
Durante il controllo di conformità, non è possibile eseguire movimenti congiunti, come il comando MoveJ.
Soglia di errore JTS (Nm) | ||||||
Modello | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
M1013 | 25 | 25 | 25 | 15 | 15 | 15 |
M0617 | 30 | 30 | 30 | 15 | 15 | 15 |
M0609 | 18 | 18 | 15 | 15 | 15 | 15 |
M1509 | 18 | 18 | 15 | 15 | 15 | 15 |
H2515 | 40 | 50 | 40 | 15 | 15 | 15 |
N. H2017 | 40 | 50 | 40 | 15 | 15 | 15 |
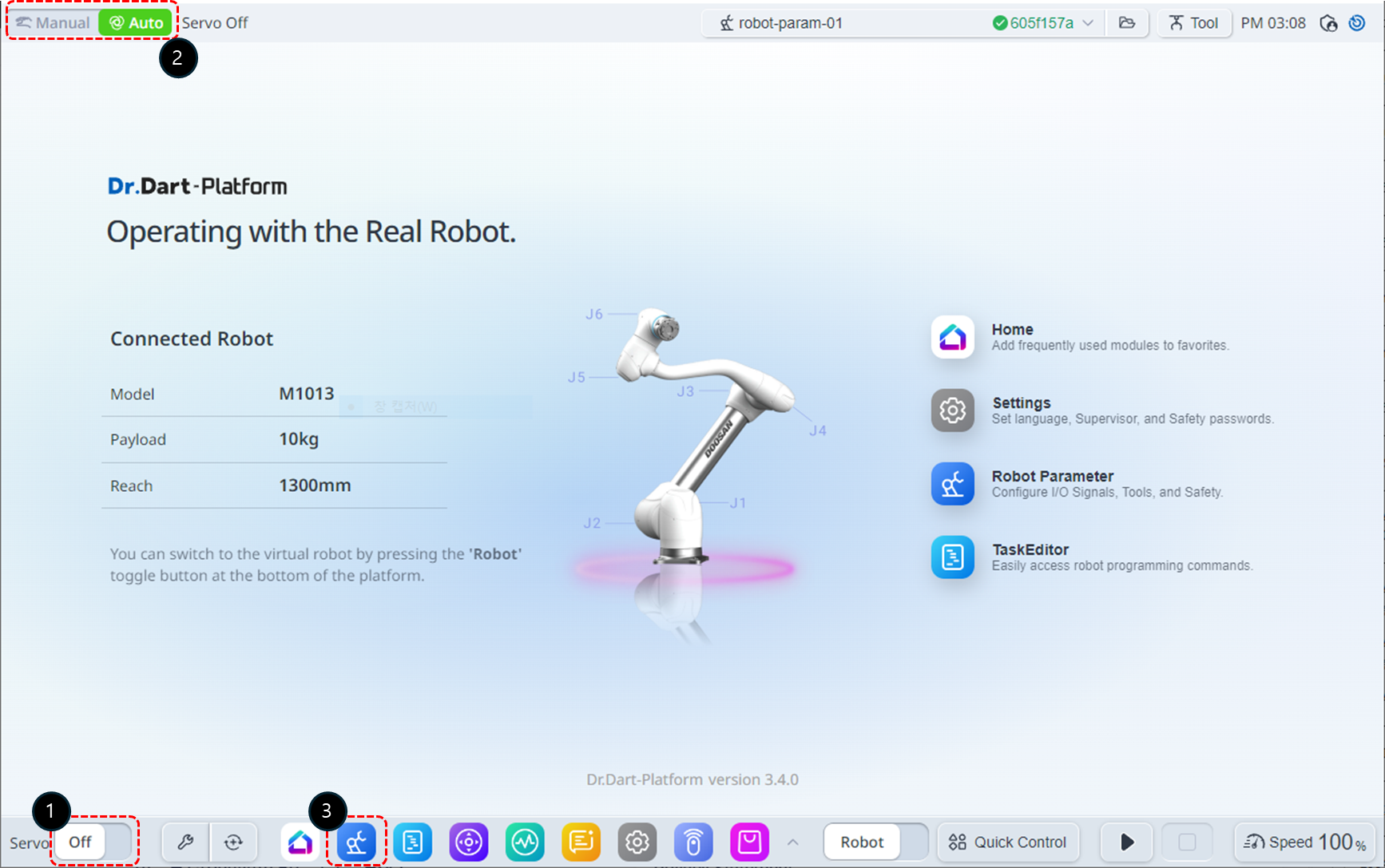
Modificare lo stato del servomeccanismo su ON.
Impostare la modalità operativa su Manuale.
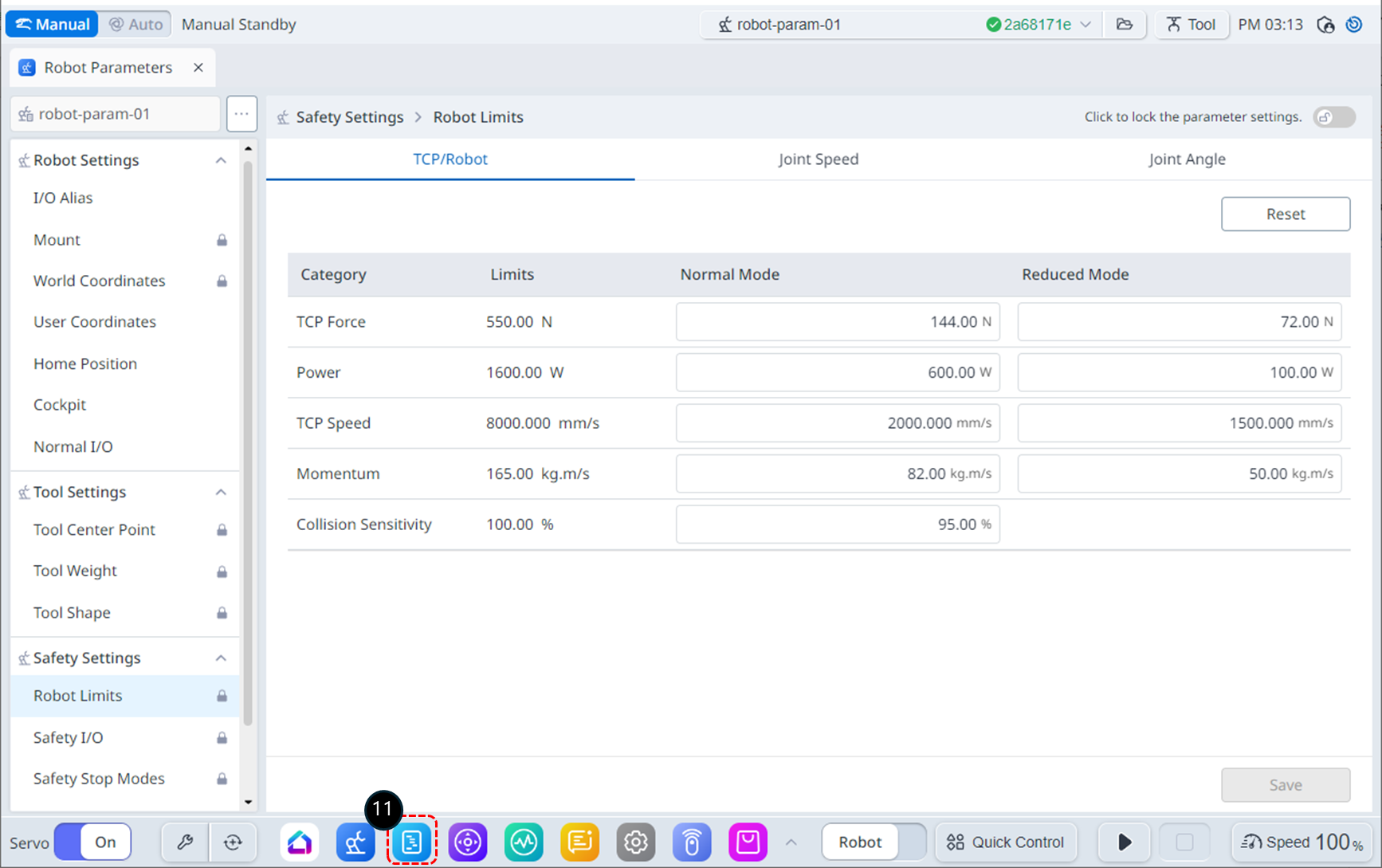
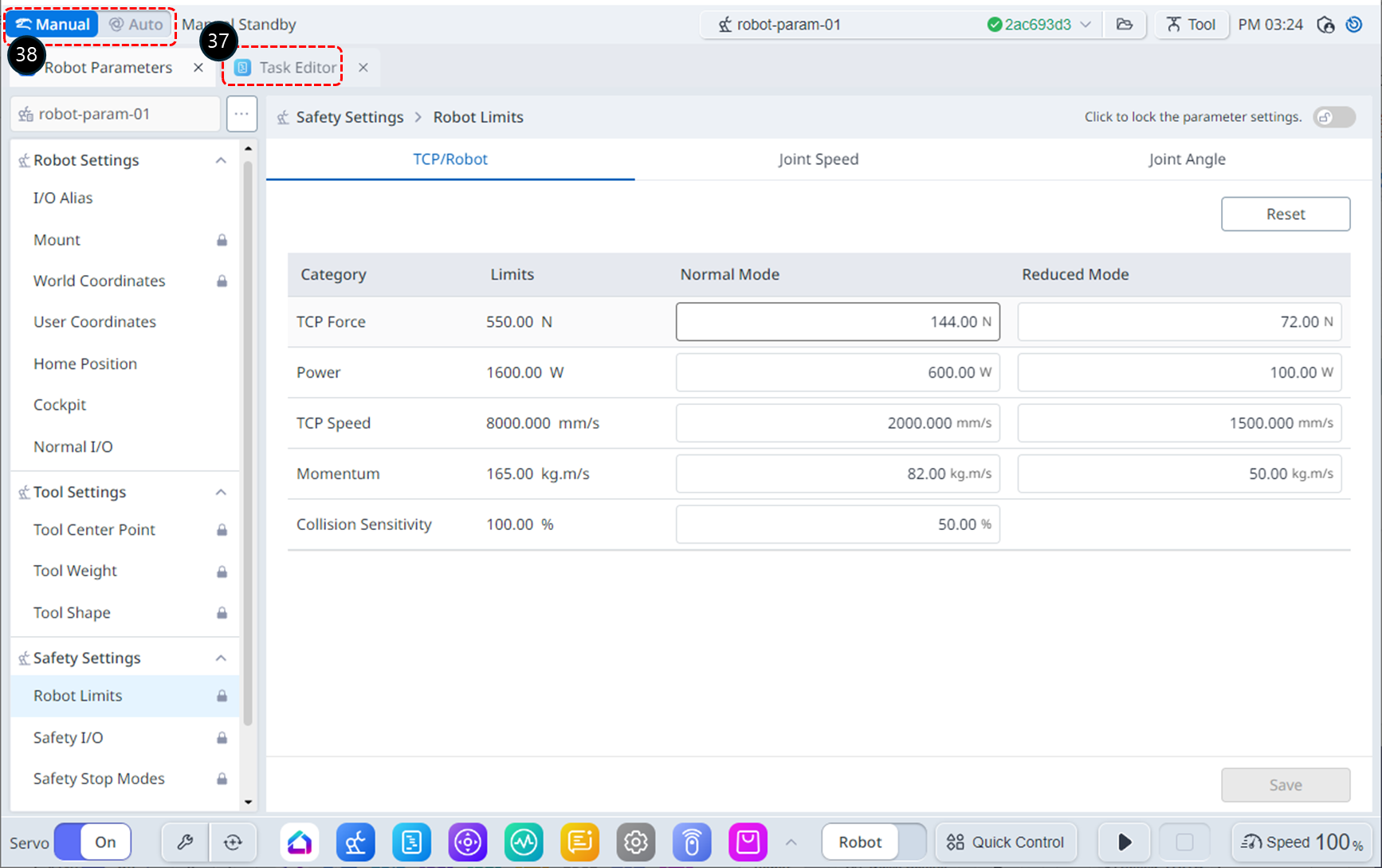
Selezionare il modulo parametri robot dal menu in basso. In questo esempio, la sensibilità alla collisione è impostata su 95% per spiegare il motivo per cui si riduce la sensibilità alla collisione quando si utilizza il controllo di conformità.
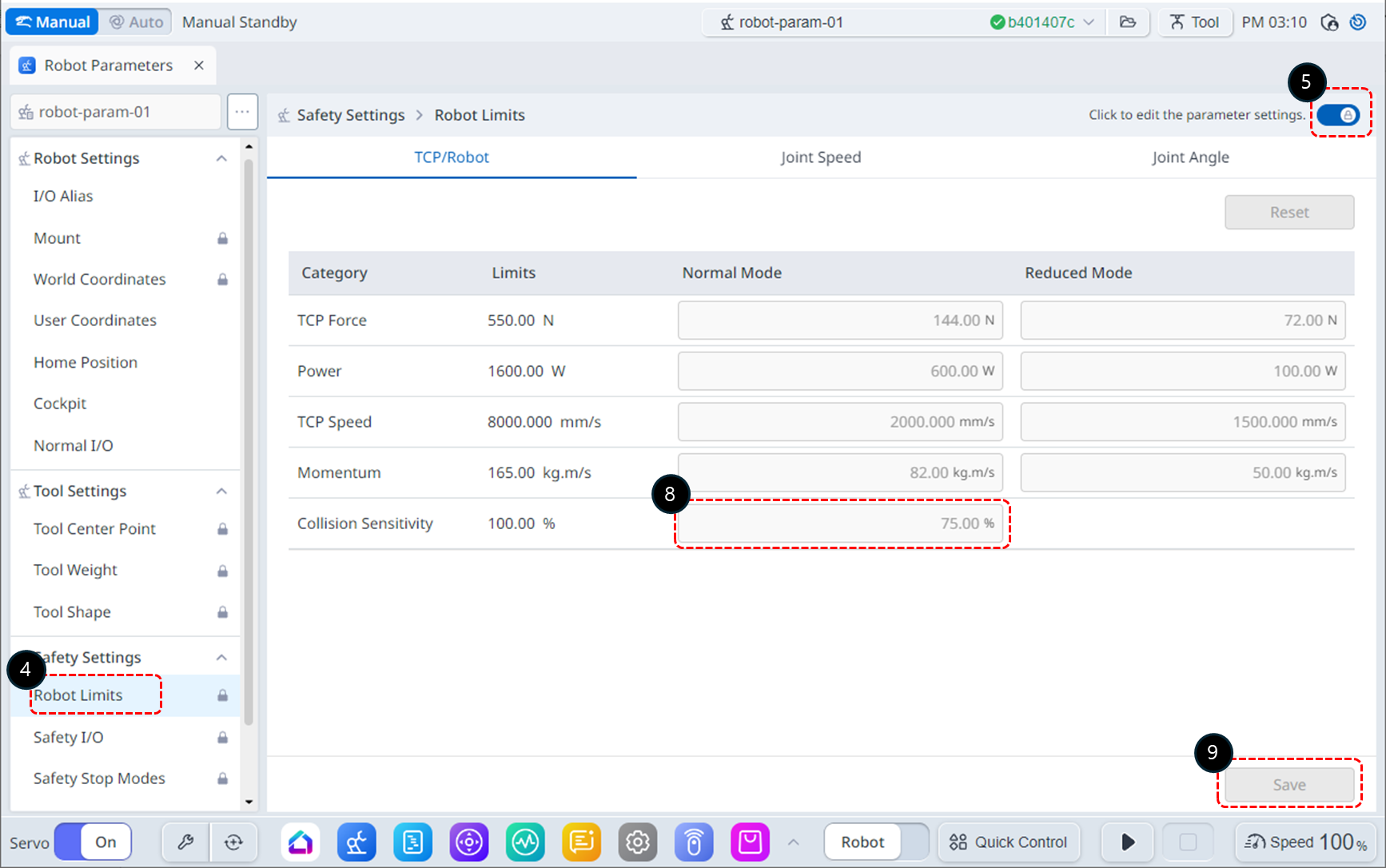
Selezionare robot Limits (limiti robot) da Safety Settings (Impostazioni di sicurezza).
Attivare lo stato di modifica dei parametri.
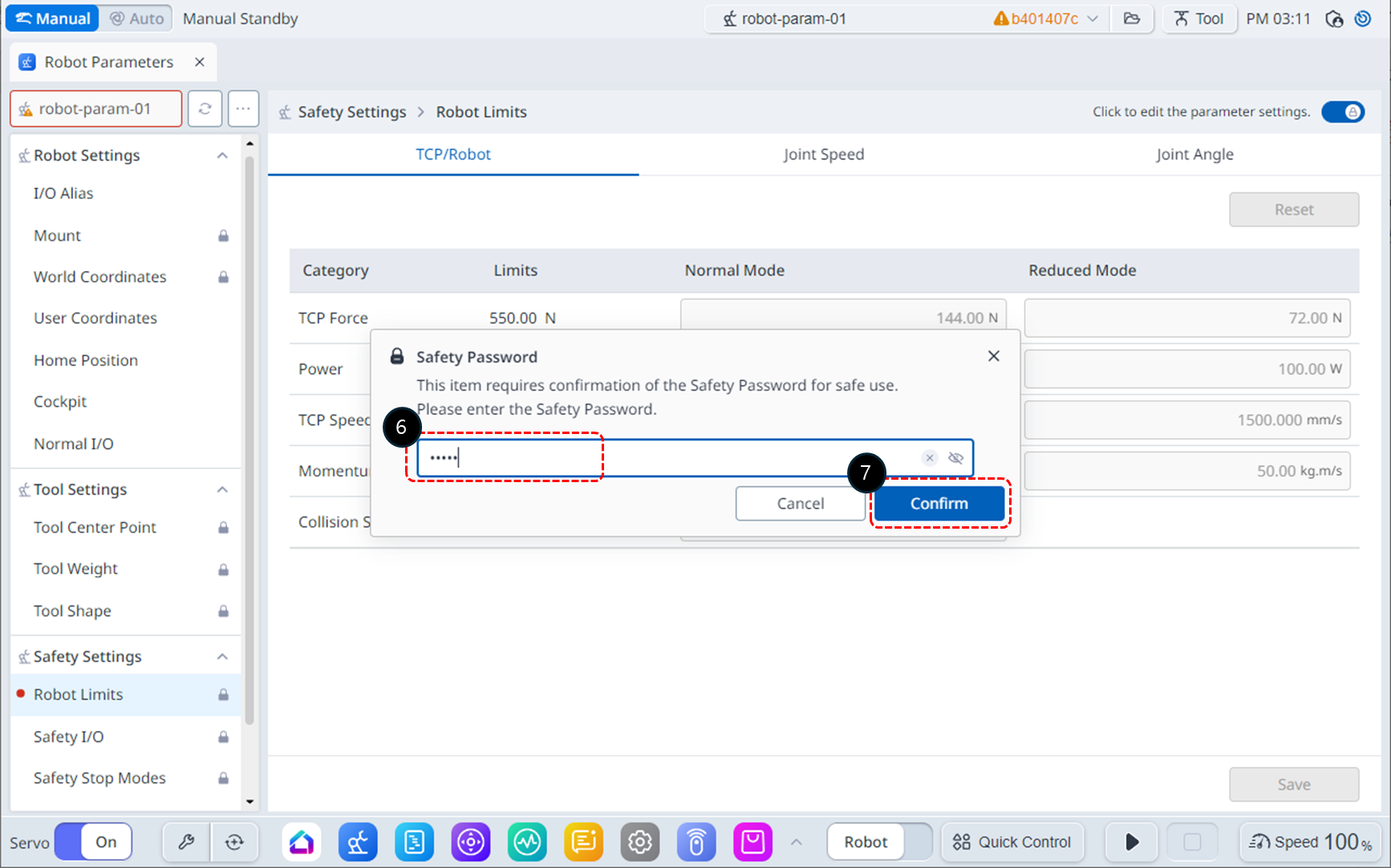
Se viene visualizzata una finestra di immissione della password, immettere la password di sicurezza (password di sicurezza predefinita: admin).
Fare clic sul pulsante Conferma.
Modificare la sensibilità alla collisione al 95%.
Fare clic sul pulsante Salva per salvare le impostazioni.
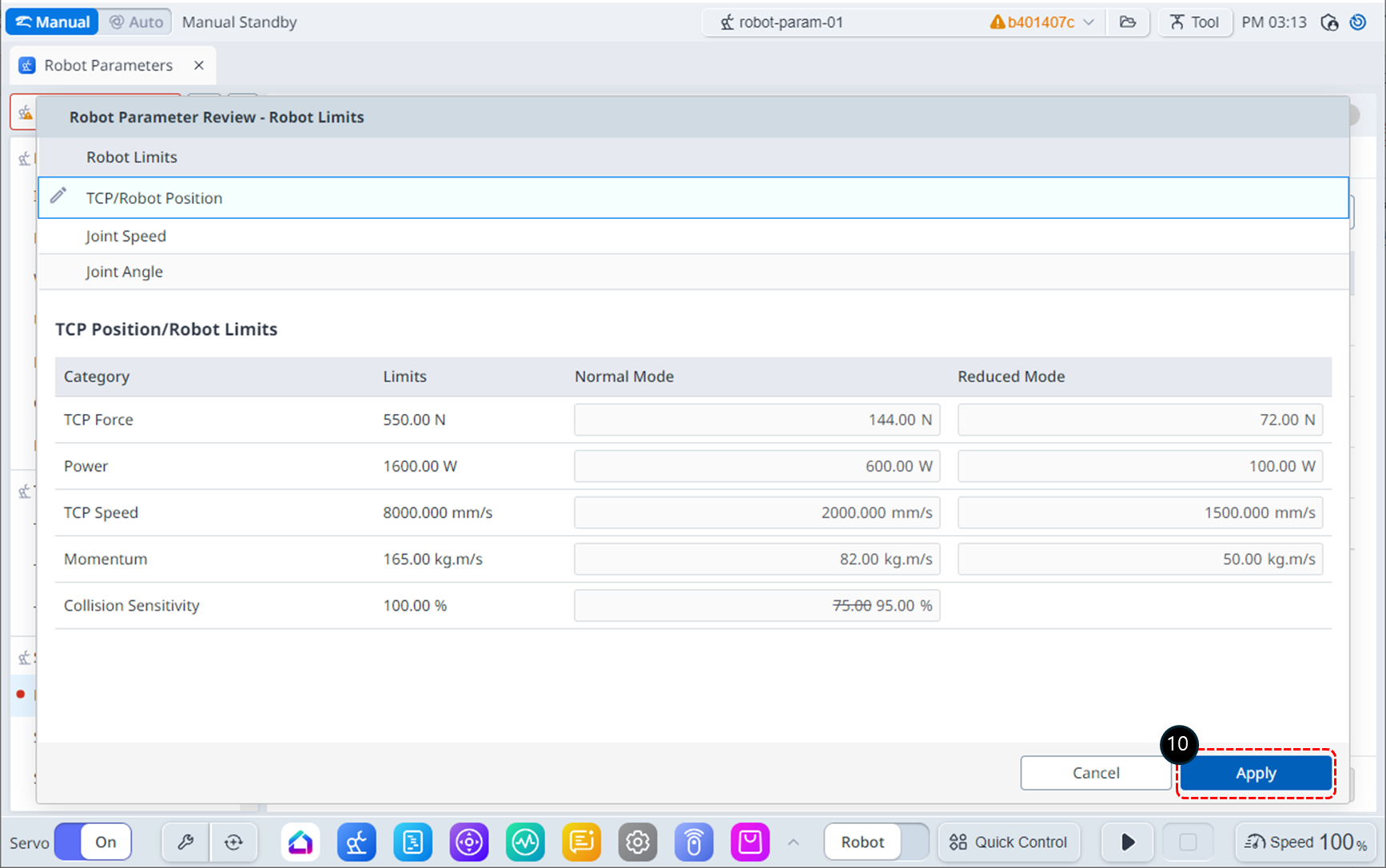
Dopo aver esaminato le modifiche, fare clic sul pulsante Applica.
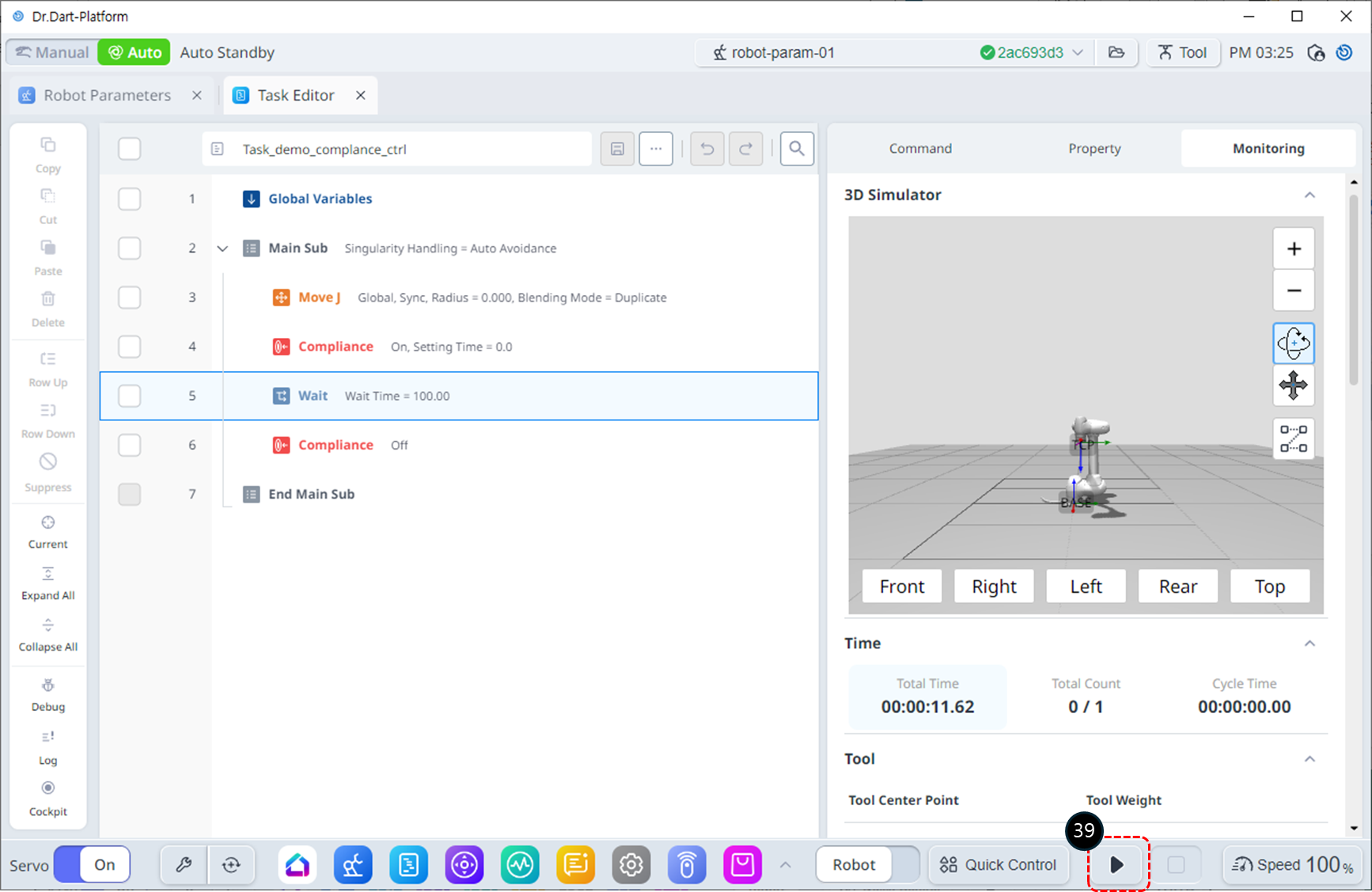
Selezionare il modulo Editor operazioni dal menu in basso.

Rinominare l' attività in Task_demo_Compliance_ctrl.
Salvare il nome dell'attività aggiornato.
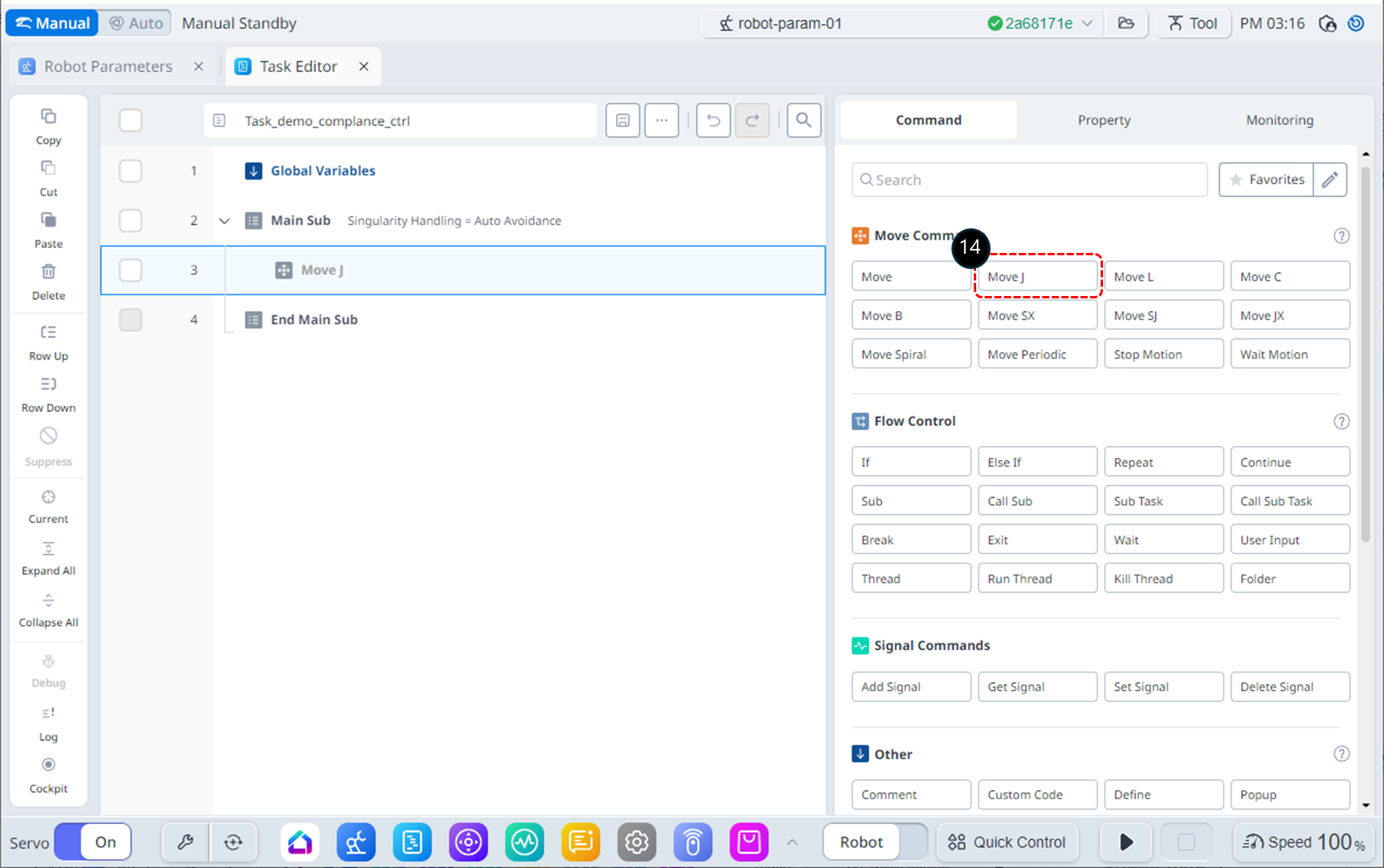
Aggiungere il comando MoveJ. Questo comando viene utilizzato per spostare il robot nella posizione iniziale per il controllo della conformità.
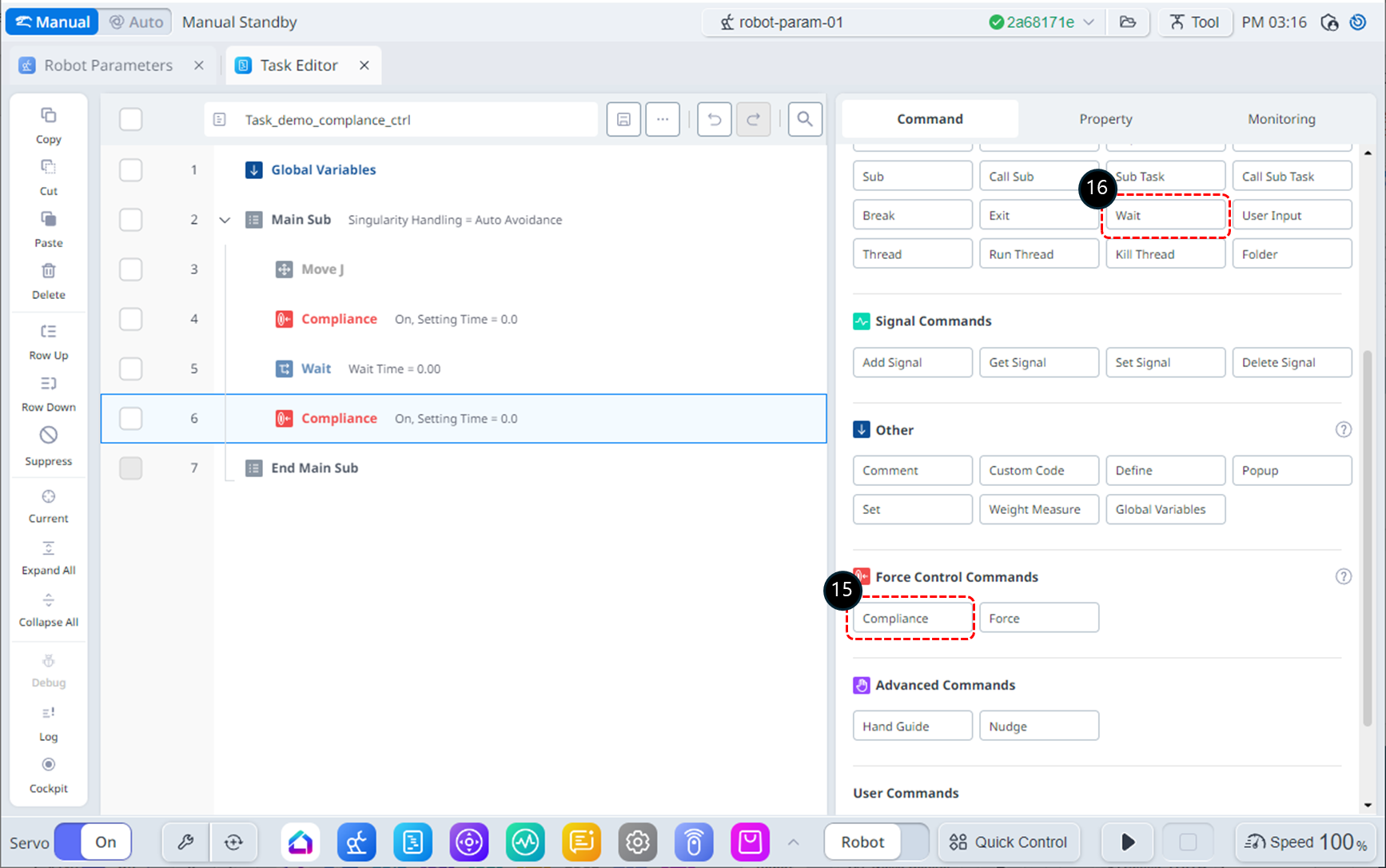
Aggiungere due comandi di conformità. Questi comandi verranno utilizzati per attivare e disattivare il controllo di conformità.
Inserire un comando di attesa tra i comandi di conformità. Questo comando di attesa verrà utilizzato per mantenere il controllo di conformità.
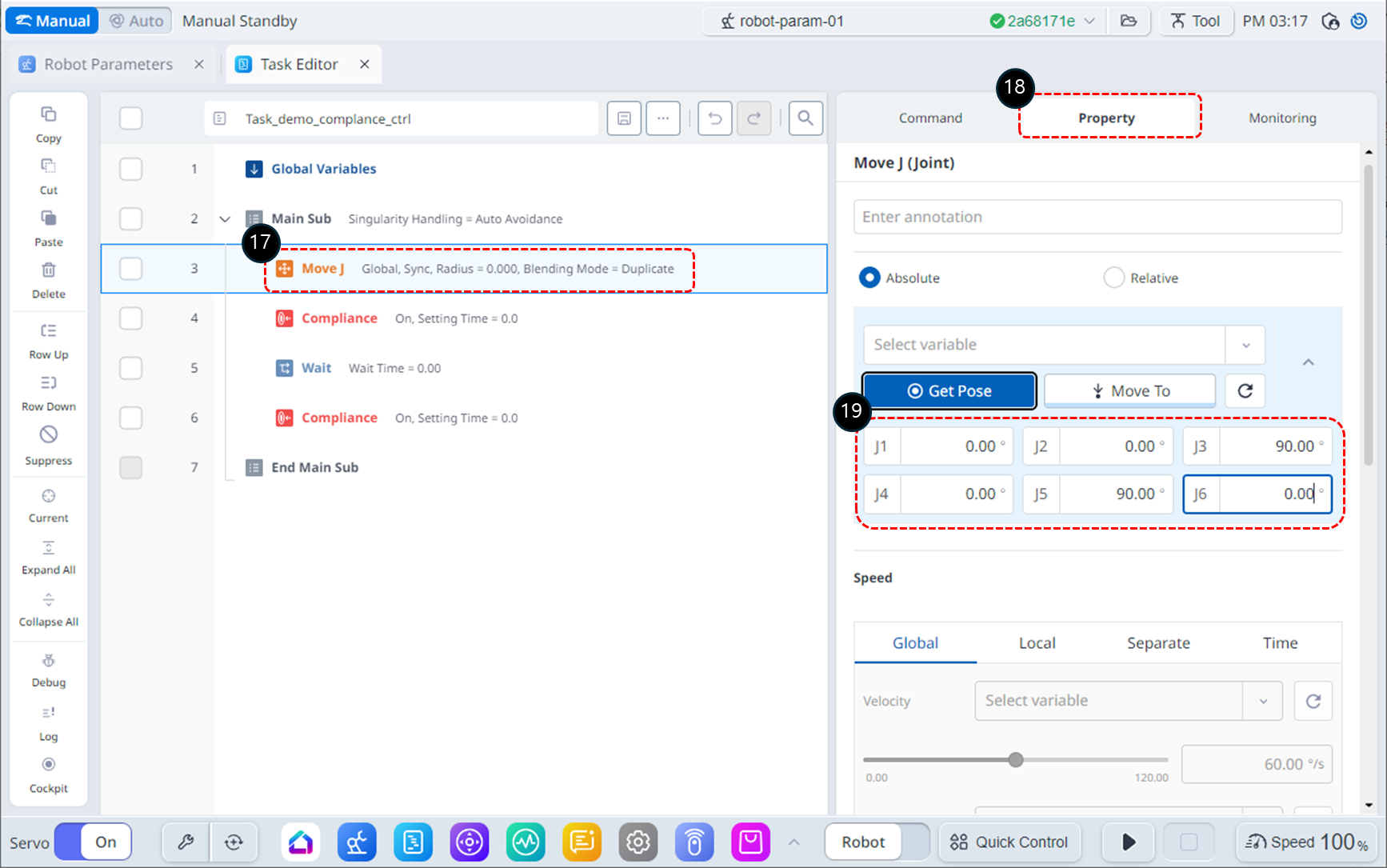
Selezionare il comando MoveJ sulla riga 3.
Scegliere la scheda Proprietà.
Modificare la posizione target di MoveJ in (0, 0, 90, 0, 90, 0) gradi A seconda dello spazio di installazione del robot, l'angolo del J1 può essere regolato se necessario.
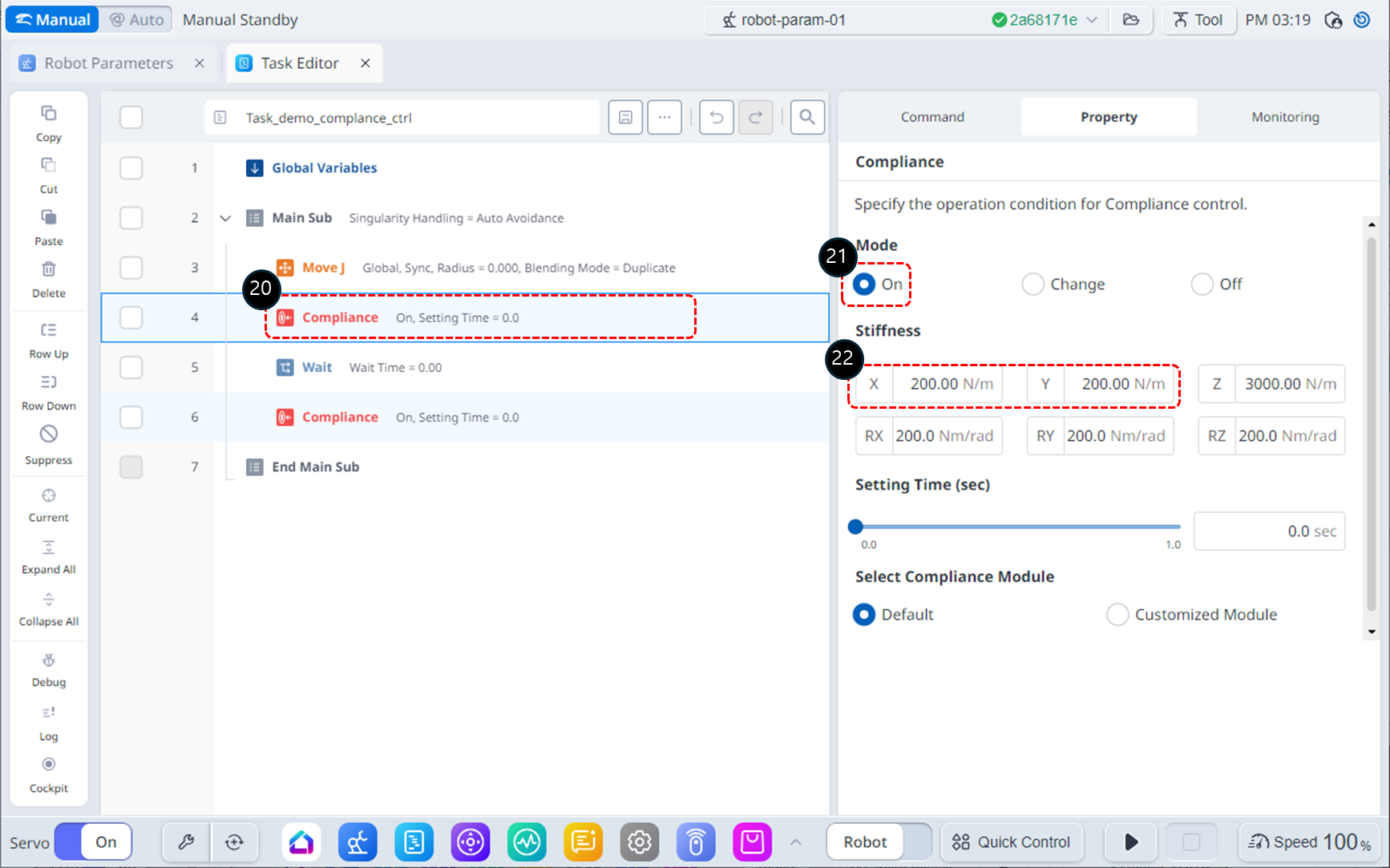
Selezionare il comando Compliance (conformità) sulla riga 4.
Nella scheda Proprietà, impostare la modalità come segue: La modalità attiva attiva il controllo della conformità.
Modalità: Acceso
Impostare rigidità come segue: Abbassare la rigidità nelle direzioni X e Y per fare in modo che il robot risponda più lentamente in quelle direzioni.
X : 200 N/m
Y : 200 N/m
Z : 3000 N/m (impostazione predefinita)
Rx, Ry, Rz: 200 Nm/rad (impostazione predefinita)
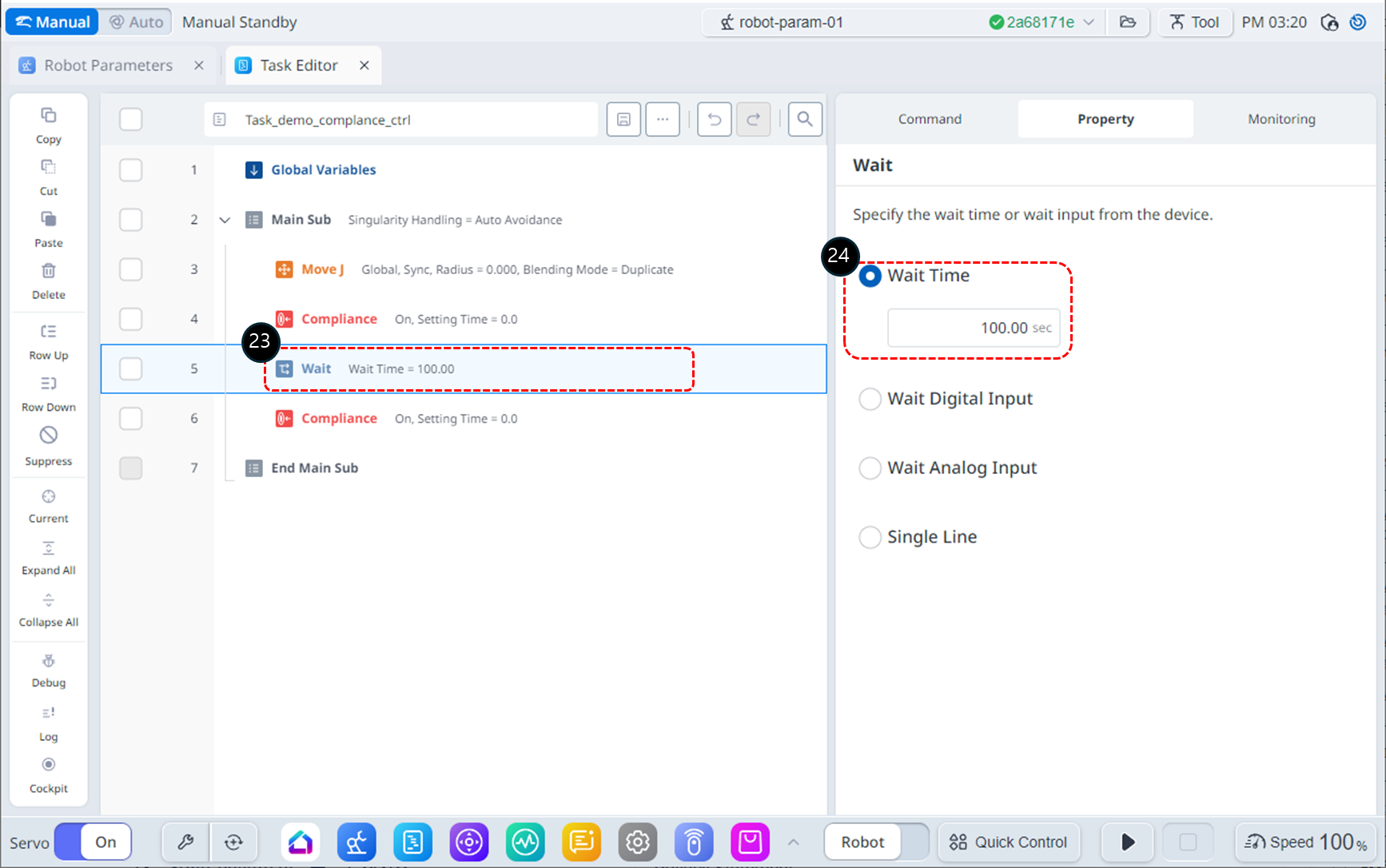
Selezionare il comando Wait (attesa) sulla riga 5.
Impostare il tempo di attesa come indicato di seguito.
Tempo di attesa: 100 sec.
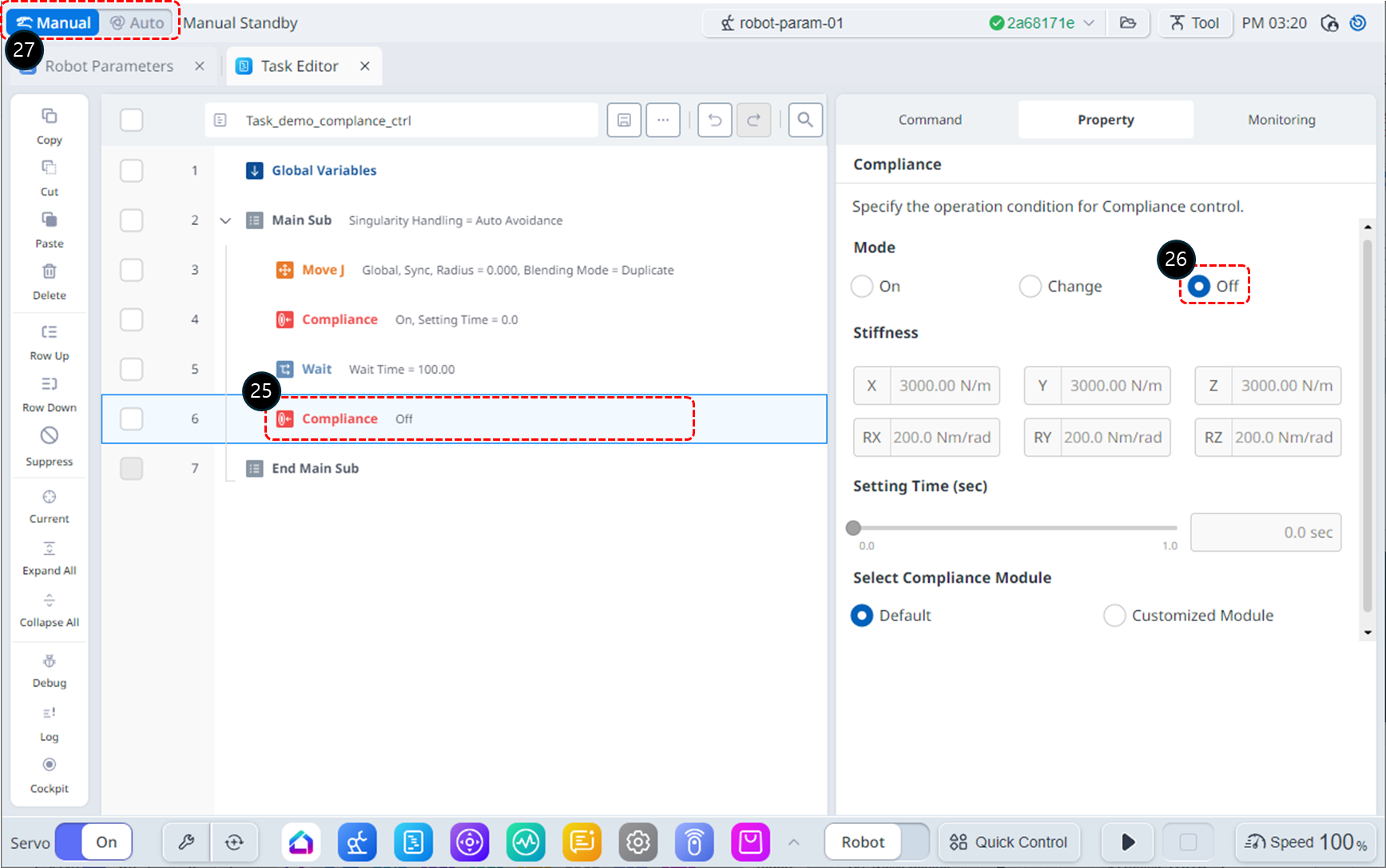
Selezionare il comando Compliance (conformità) sulla riga 6.
Nella scheda Proprietà, impostare la modalità come segue: La modalità Off disattiva il controllo di conformità.
Modalità: Spento
Impostare la modalità operativa su Auto. La scheda Proprietà passa automaticamente alla scheda monitoraggio.
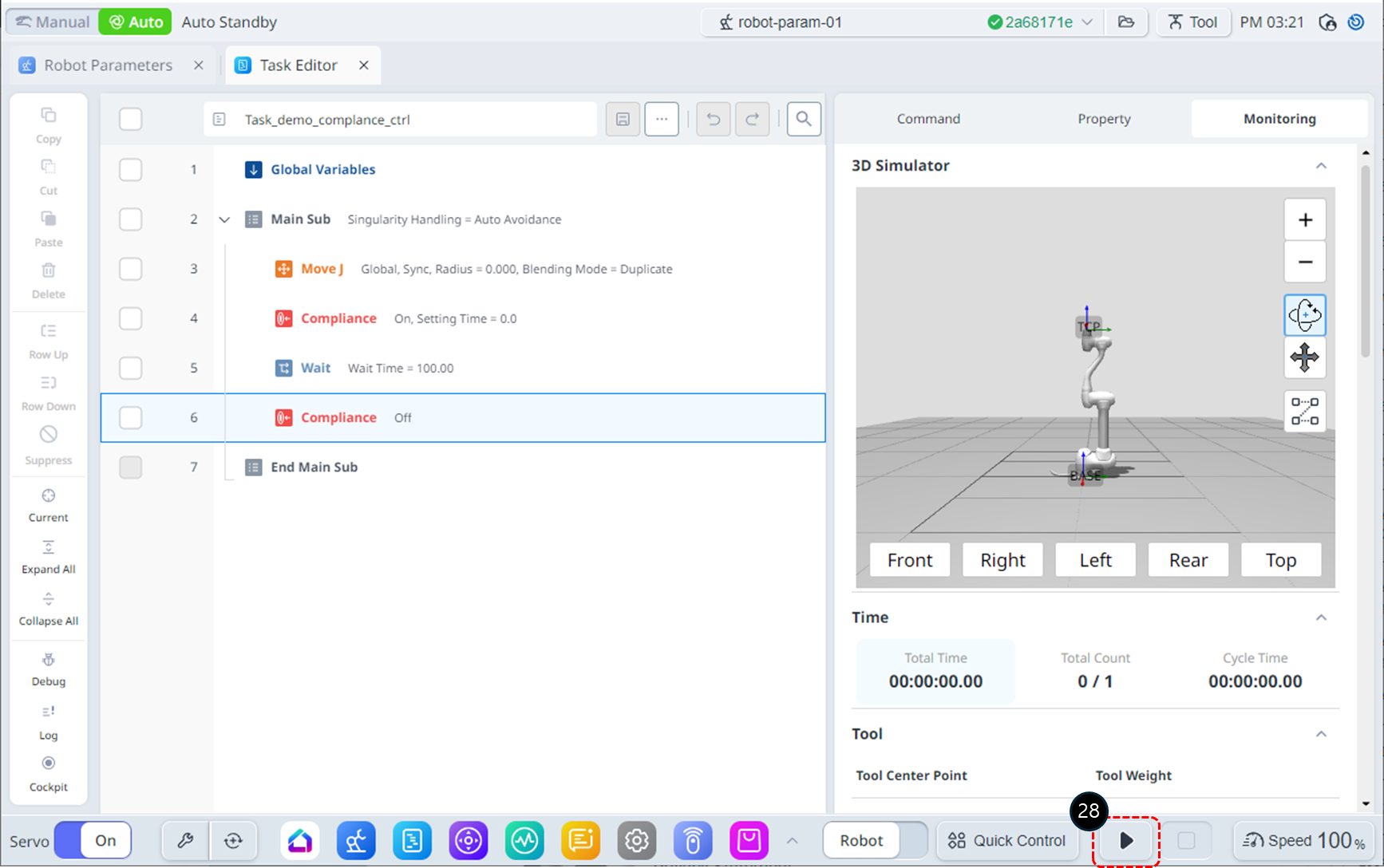
Fare clic sul pulsante Esegui. Il robot si sposta nella posizione iniziale, avvia il controllo di conformità e rimane fermo per 100 secondi. Durante questo periodo di tempo, spingere delicatamente l'attuatore finale del robot verso il corpo del robot. Il robot si arresta con un errore di collisione (o errore limite forza TCP). Nello stato di arresto di sicurezza causato dalla collisione, il LED del robot visualizza un colore giallo.
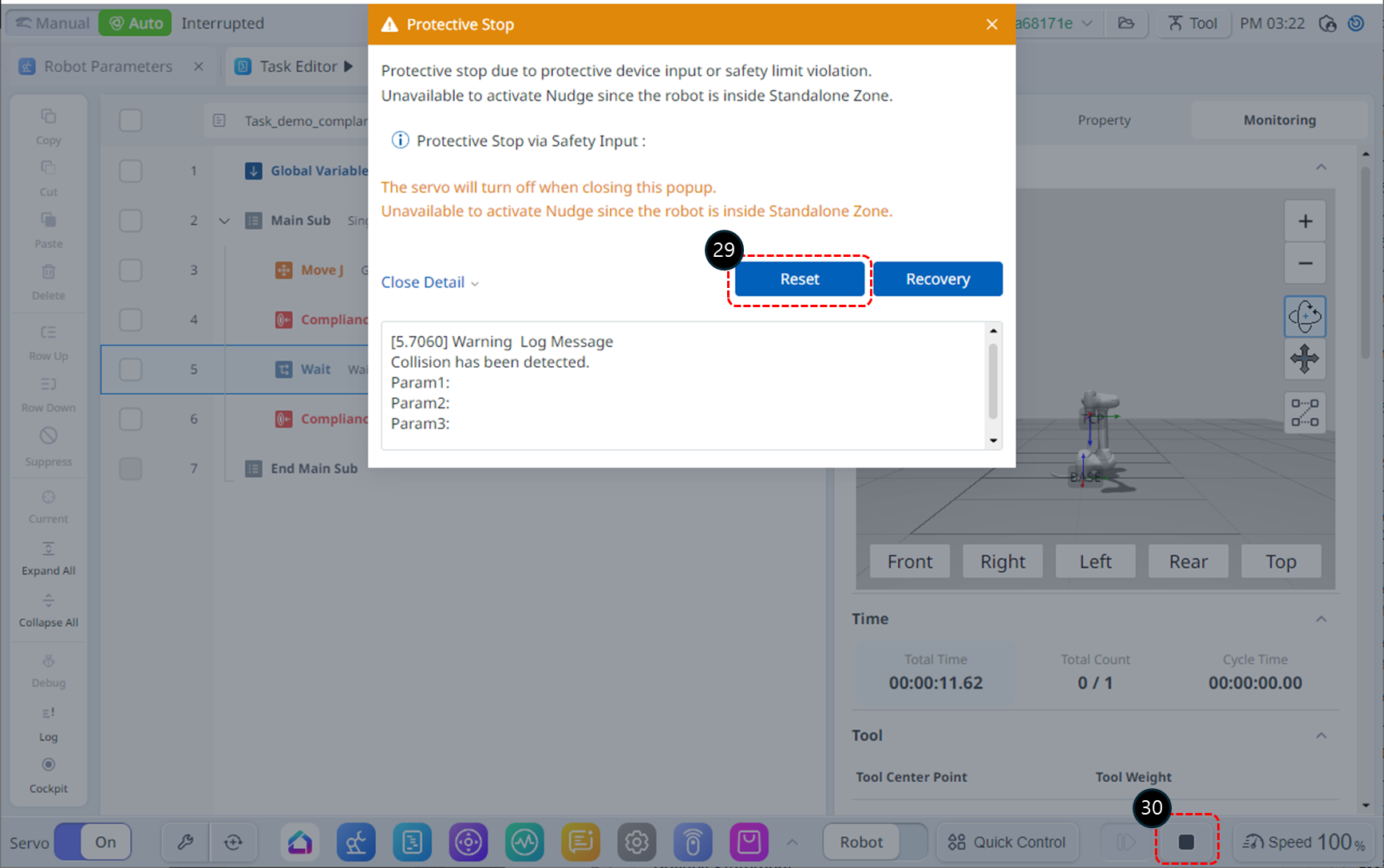
Fare clic sul pulsante Reset (Ripristina) nella finestra di avvertenza dell'arresto di sicurezza. Il programma di attività riprenderà il funzionamento.
Fare clic sul pulsante Stop per terminare il programma.
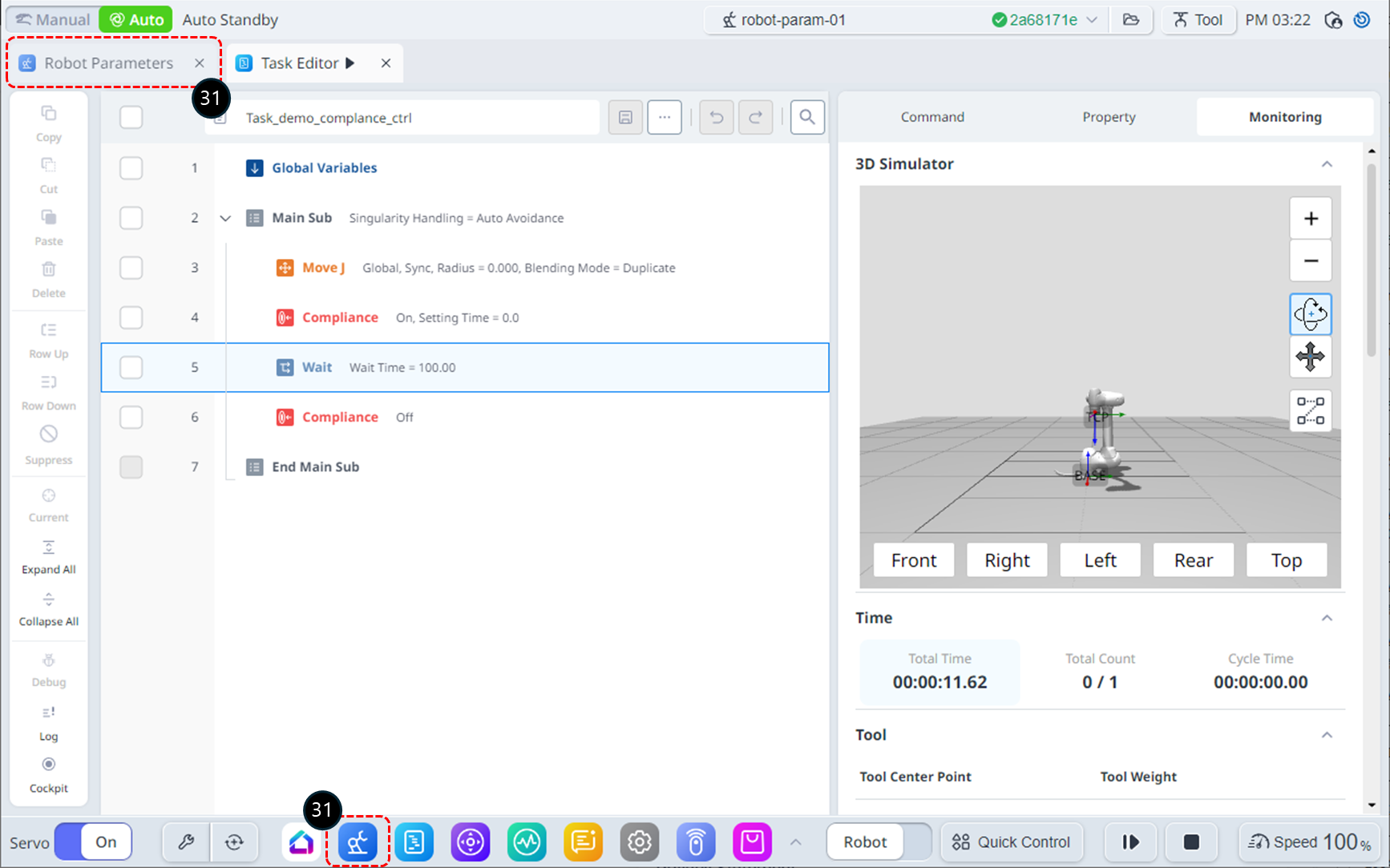
Per risolvere i problemi di collisione, la sensibilità alla collisione nelle impostazioni di sicurezza deve essere abbassata. (Se si verifica un problema relativo al limite di forza TCP, il parametro forza TCP deve essere aumentato). Selezionare il modulo parametri robot dal menu in basso. In alternativa, è possibile selezionare la scheda del modulo parametri robot nell'angolo superiore sinistro, che funziona allo stesso modo.
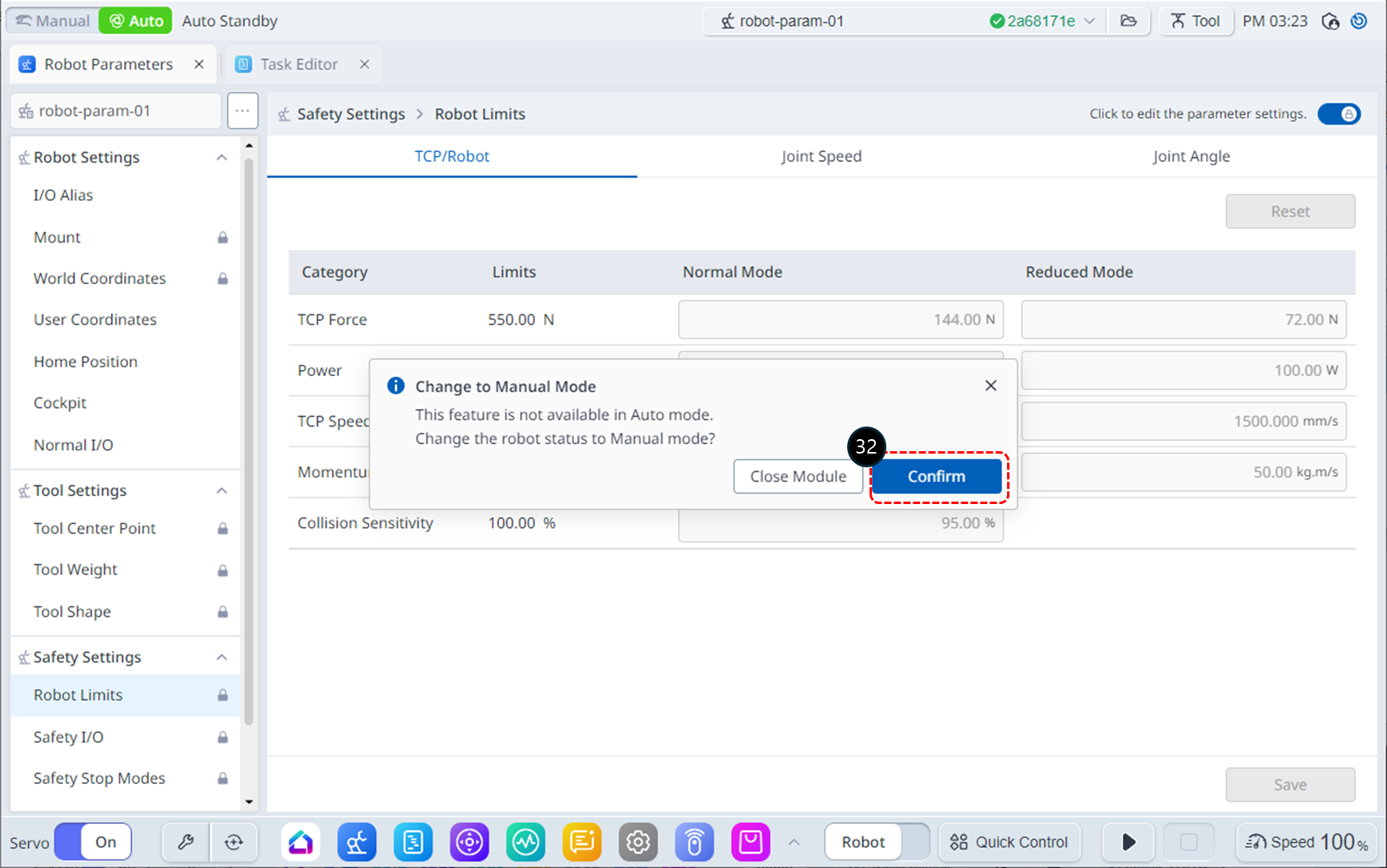
In modalità Auto, l'accesso al modulo robot Parameters (parametri robot) attiva una finestra di notifica. Fare clic sul pulsante Conferma per passare alla modalità Manuale.
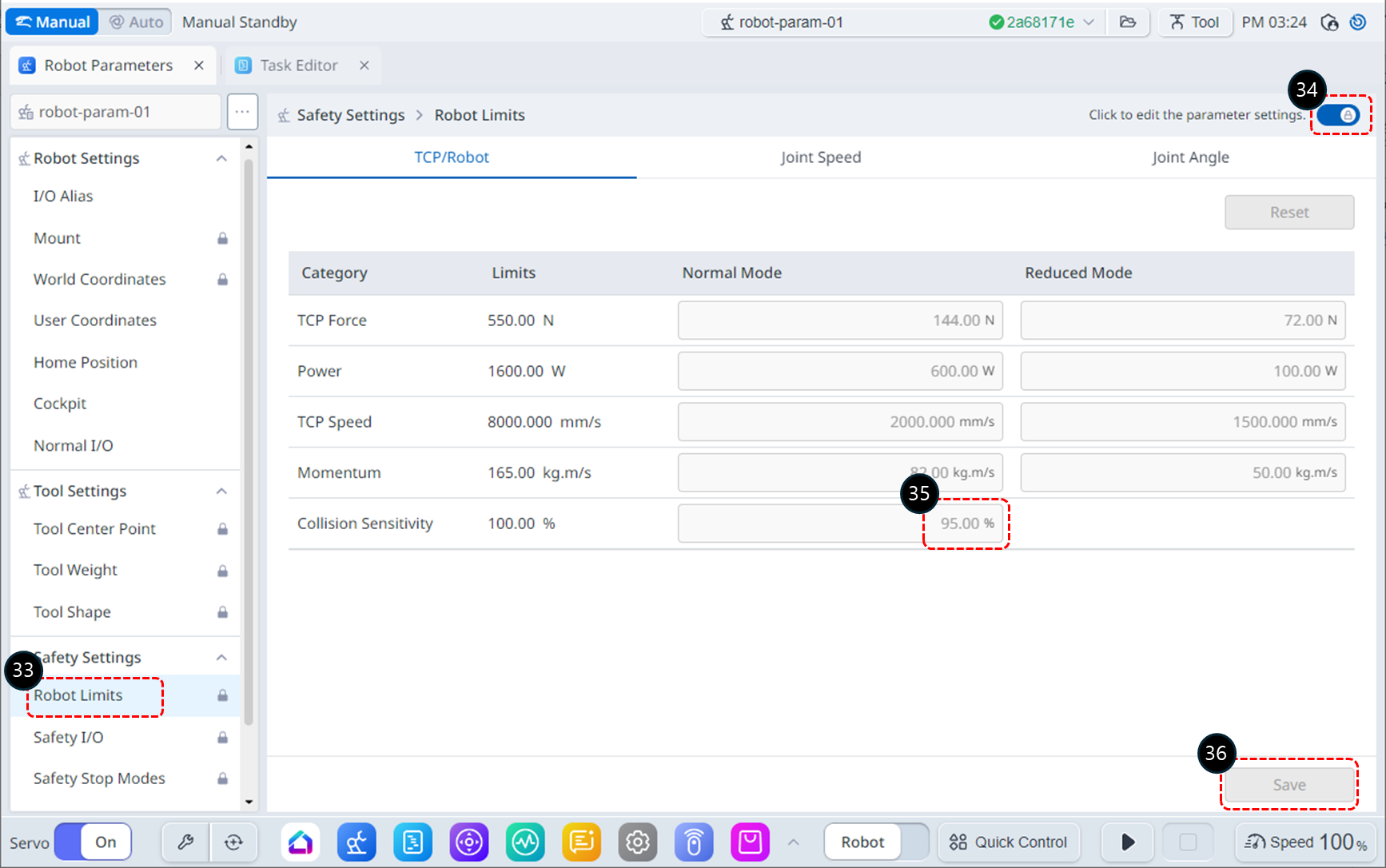
Selezionare robot Limits (limiti robot) da Safety Settings (Impostazioni di sicurezza).
Attivare lo stato di modifica dei parametri. Se viene visualizzata una finestra di immissione della password, fare riferimento ai passaggi 6–7.
Modificare la sensibilità alla collisione al 50%.
Fare clic sul pulsante Salva per salvare le impostazioni. Se viene visualizzata la finestra robot Parameters Review (revisione parametri robot), rivedere le modifiche e fare clic sul pulsante Apply (Applica).
Selezionare la scheda del modulo Editor operazioni.
Passare alla modalità automatica per eseguire il programma attività.
Fare clic sul pulsante Esegui. Durante il tempo di attesa, spingere delicatamente l'attuatore finale del robot verso il corpo del robot. Il robot si muoverà a causa della forza di spinta e, una volta rilasciata la mano, tornerà nella posizione originale.