
Modulo Backdrive
Il backdrive interrompe l'alimentazione fornita ai motori, rilasciando solo i freni per consentire ai giunti del robot di muoversi sotto la forza esterna. Questa funzione viene utilizzata quando il robot non può tornare allo stato normale con la modalità Recovery (recupero) o Handguiding (Guida manuale). Con la modalità Backdrive, l'utente può innestare o disinnestare il freno di ciascun giunto.

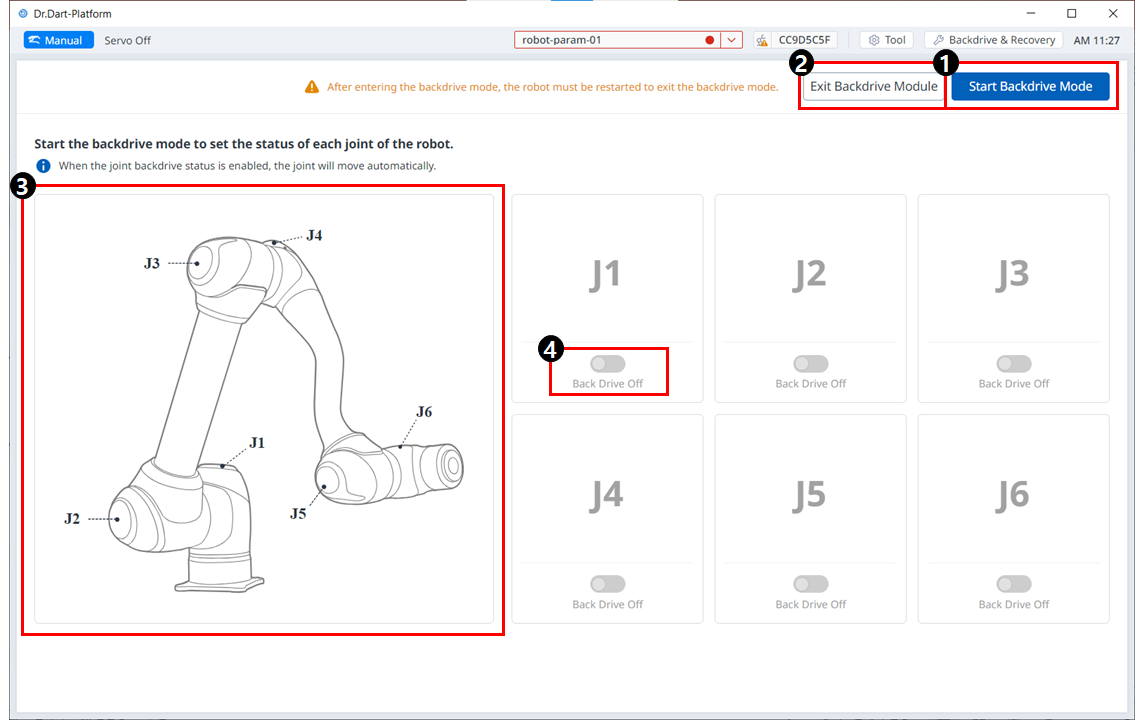
Per accedere al modulo Backdrive, toccare il pulsante Backdrive situato nella parte inferiore.
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Avviare la modalità Backdrive | Questo pulsante consente di eseguire la modalità Backdrive. |
| 2 | Uscire da Backdrive | Questo pulsante consente di uscire dal modulo Backdrive. |
| 3 | Immagine congiunta | Si tratta di un'immagine che descrive la posizione di ciascun giunto. |
| 4 | Pulsante di attivazione/disattivazione | È possibile scegliere se attivarlo per ogni giunto. |
Il processo di impostazione della modalità Backdrive è il seguente:
Toccare il pulsante Stato sul pulsante Backdrive del menu principale.
Se il pulsante Backdrive non è abilitato, premendo e rilasciando il pulsante Emergency Stop (arresto di emergenza) o premendo il pulsante Servo Off (disattivazione servoazionamento) si attiva la funzione.
Nello stato servo-ON, viene visualizzata la seguente finestra a comparsa e il servo viene disattivato automaticamente.
Toccare il pulsante Start Backdrive Mode (Avvia modalità backdrive ) sulla schermata Backdrive.
Il pulsante OFF/ON viene attivato per rilasciare i freni su ciascun giunto.

Impostare il freno del giunto in posizione OFF (rilascio) e spostare il robot applicando una forza.
A causa del rapporto di decelerazione del deceleratore all'interno del giunto, la velocità di cedimento del giunto dovuta al peso del manipolatore non è elevata e la velocità di movimento quando viene applicata una forza non è elevata.
Se il deceleratore non funziona correttamente o se i giunti si muovono a una velocità superiore a una determinata velocità durante il movimento a gravità zero, i freni di tutti i giunti vengono applicati automaticamente per garantire la sicurezza.
INSERIRE il freno (mantenimento) al termine del cambio di posizione.
Toccare il pulsante di accensione nel menu principale per arrestare il programma operativo, quindi tenere premuto il pulsante di accensione sulla parte superiore del teach pendant per spegnere il sistema e premerlo nuovamente per accendere il sistema.
Lo stato Backdrive viene rilasciato e il lavoro può riprendere normalmente.
Nota
Riportare ciascun giunto alla normale gamma di lavoro singolarmente in ordine sequenziale.
Se viene eseguita la modalità Backdrive, il sistema deve essere riavviato per riprendere il normale funzionamento.
Tenere presente che , in base alla posizione dell'asse durante la modalità Backdrive, potrebbe verificarsi un'inclinazione temporanea.