
Allinea pannello
Menu
Elementi | Descrizione | |
|---|---|---|
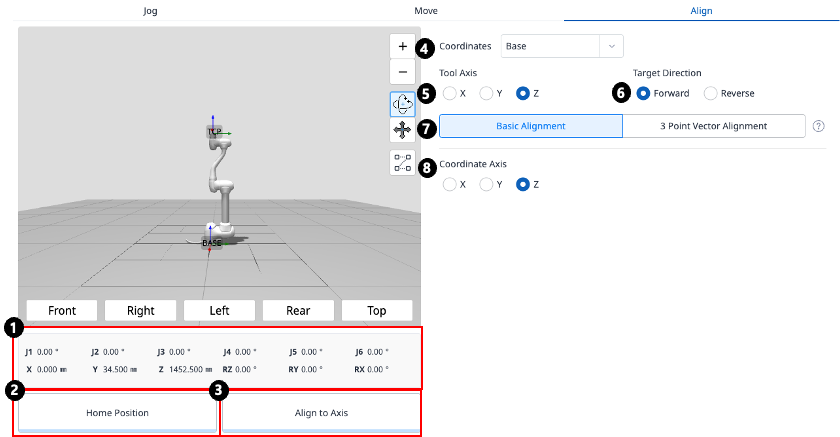
1 | Postura robot | Visualizza la postura articolare e la postura dell'attività del robot corrente. |
2 | Pulsante posizione iniziale | Quando si fa clic su questo pulsante, il robot si sposta nella posizione iniziale. |
3 | Pulsante Allinea | Allinea il robot quando si fa clic su di esso. |
4 | Selezionare sistema di coordinate di riferimento | Selezionare il sistema di coordinate di riferimento per il posizionamento. |
5 | Asse dello strumento | Selezionare l'asse del TCP da allineare. |
6 | Direzione di destinazione | Selezionare la direzione con cui allineare il TCP. |
7 | Metodo di allineamento | Selezionare il metodo di allineamento. |
8 | Asse delle coordinate | Selezionare l'asse del sistema di coordinate di riferimento con cui allineare. |
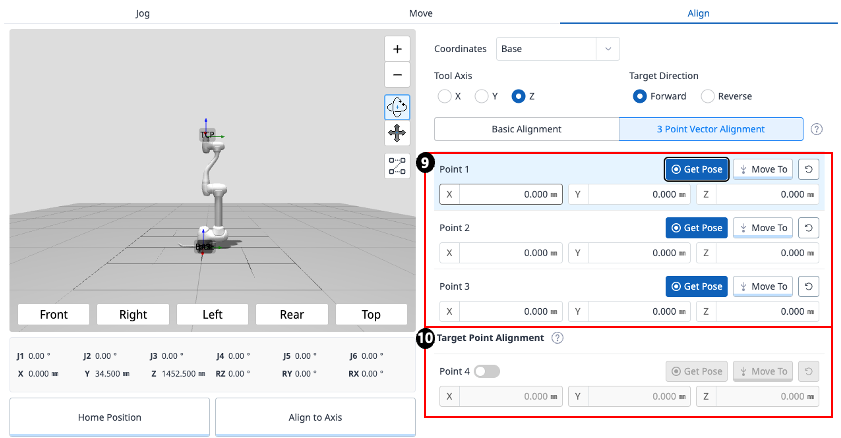
9 | Selezionare punti su un piano | Selezionare tre punti che definiscono il piano. 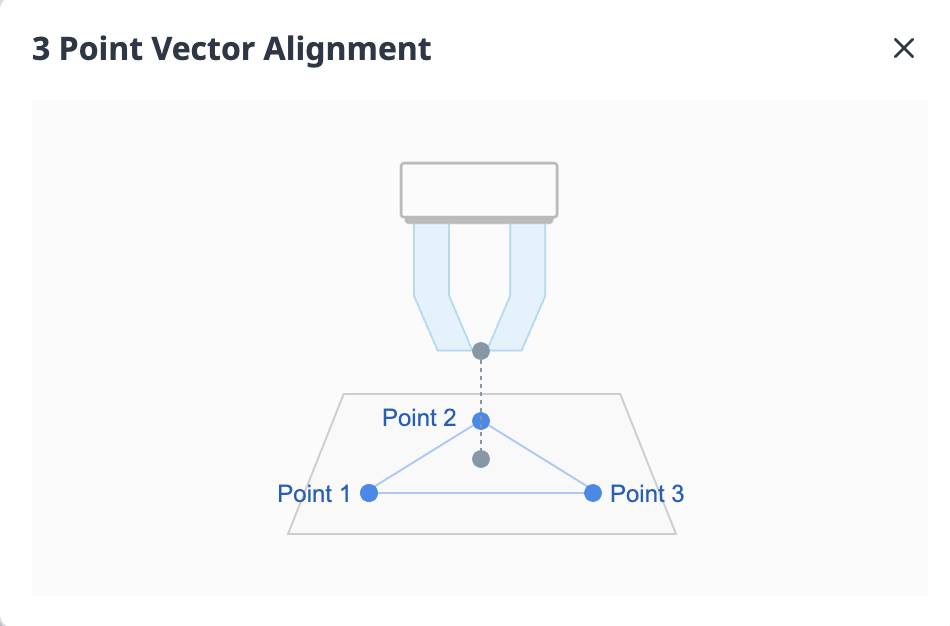 |
10 | Allineamento del punto di destinazione | Selezionare un punto per posizionare il TCP. |