
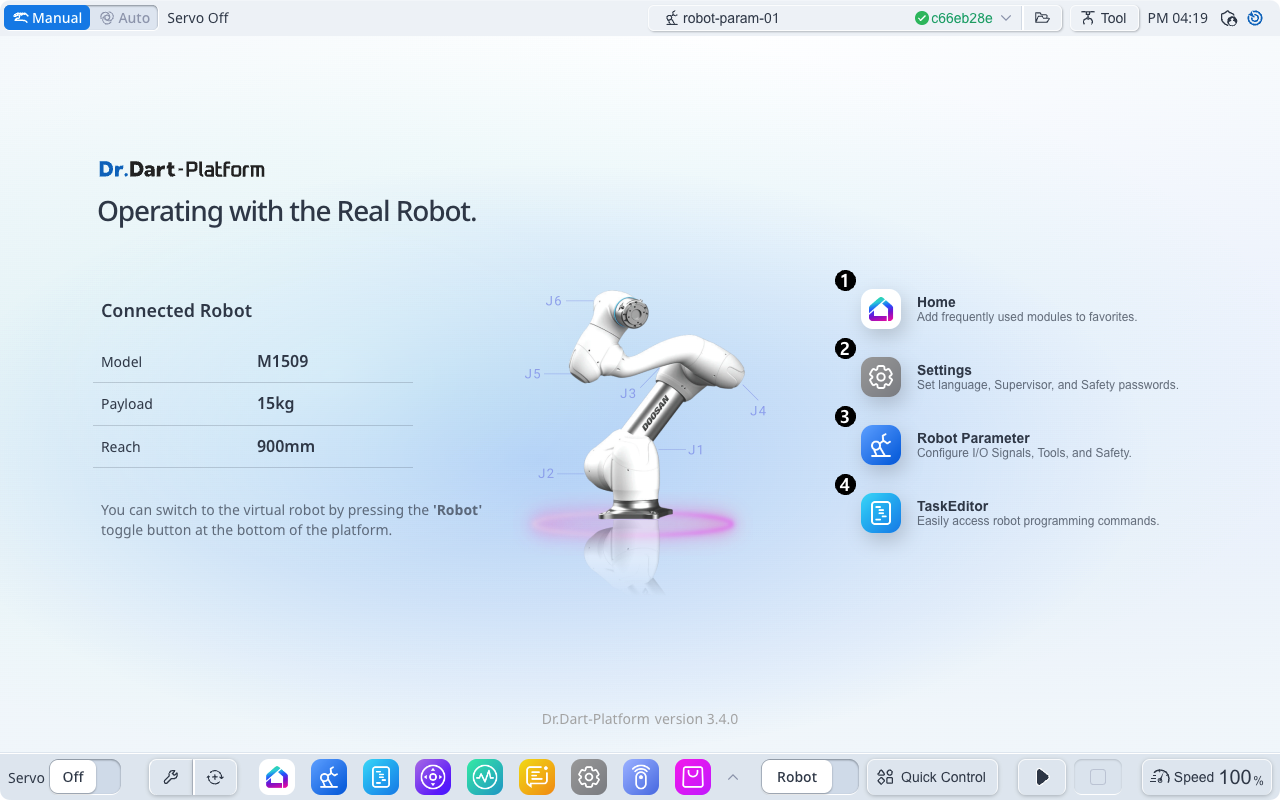
Panoramica del layout dello schermo del programma
Elementi | Descrizione | |
|---|---|---|
| 1 | Icona del modulo Home | Avviare il modulo Home. |
| 2 | Icona del modulo impostazioni | Avviare il modulo Impostazioni. |
| 3 | Icona del modulo parametri robot | Avviare il modulo robot Parameter (parametri robot). |
| 4 | Icona del modulo Editor operazioni | Avviare il modulo Editor operazioni. |
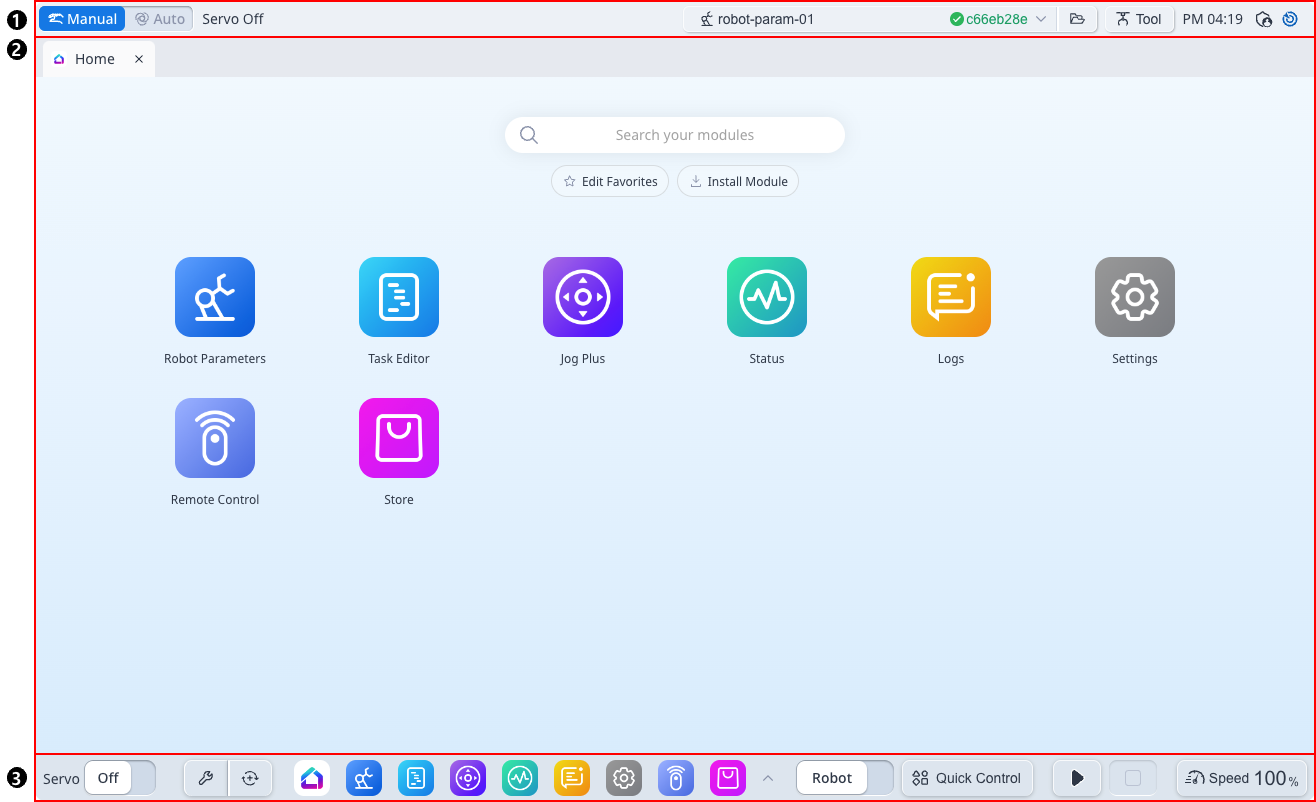
Elementi | Descrizione | |
|---|---|---|
| 1 | Intestazione | Il pannello che fornisce l'interruttore di modalità automatica/manuale, Stato robot, parametri robot, Impostazioni utensile, Menu e ora. |
| 2 | Corpo | Il pannello che visualizza la schermata del modulo eseguito. |
| 3 | Piè di pagina | Pannello che fornisce il servomotore, i moduli preferiti, l'interruttore modalità robot/virtuale, controllo rapido e controllo programma e controllo velocità robot. |
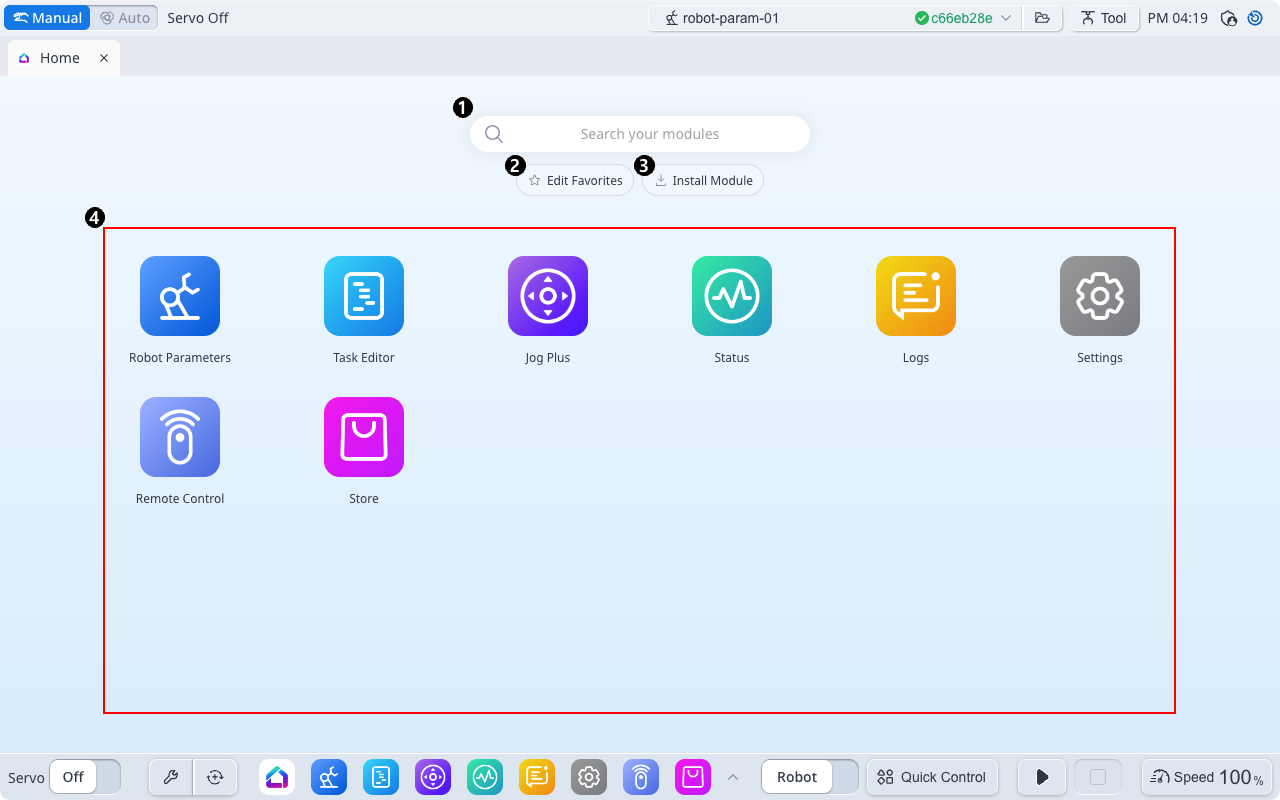
Panoramica della schermata iniziale
Elementi | Descrizione | |
|---|---|---|
| 1 | Ricerca | Consente di cercare i moduli installati. |
| 2 | Modifica preferito | È possibile selezionare i moduli da visualizzare nell'elenco moduli preferiti del piè di pagina. Se si fa clic sul MODIFICA PREFERITI pulsante per selezionare/deselezionare il modulo, questo verrà applicato immediatamente all'elenco dei moduli preferiti del piè di pagina. Fare clic sul SALVA PREFERITI pulsante per terminare la modifica dei preferiti. 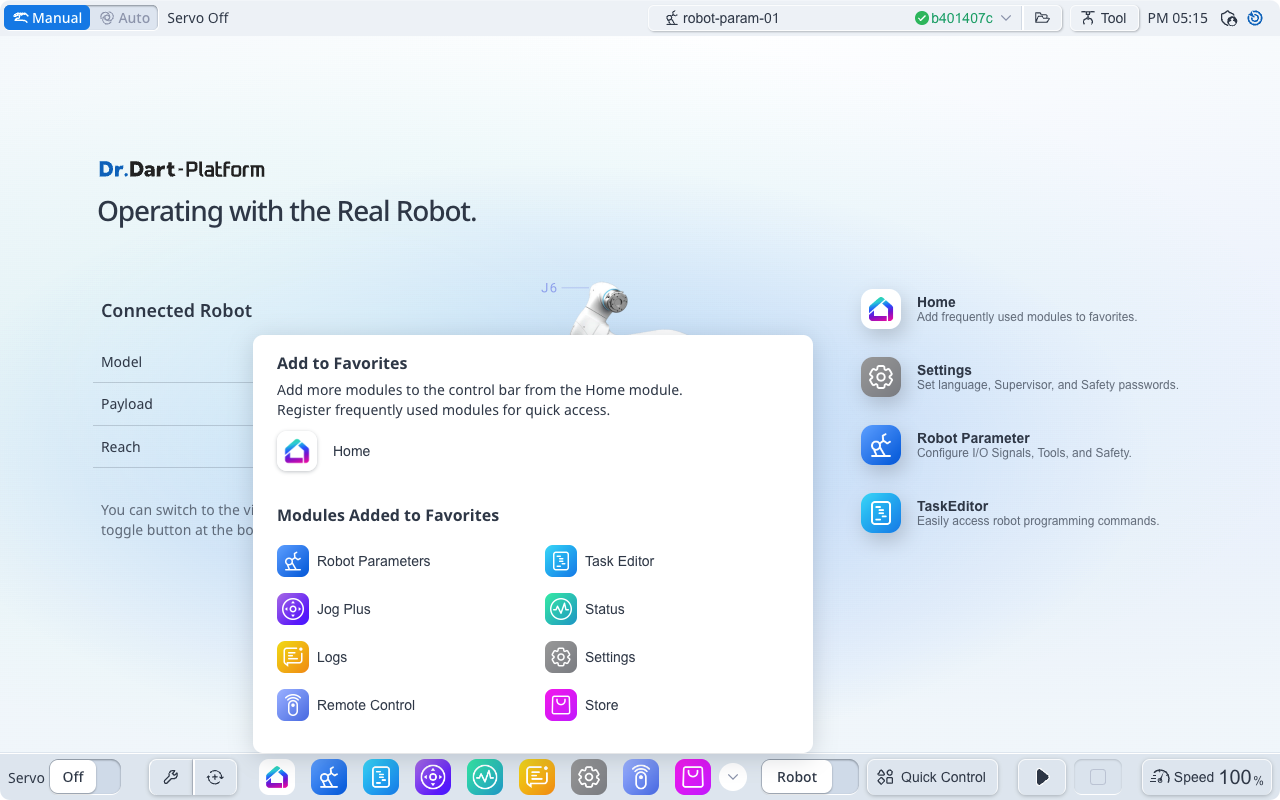 |
| 3 | Installare il modulo | È possibile installare il modulo selezionando il file di installazione del pacchetto del modulo scaricato (*.dm). |
| 4 | Moduli | Vengono visualizzate le icone dei moduli eseguibili. |
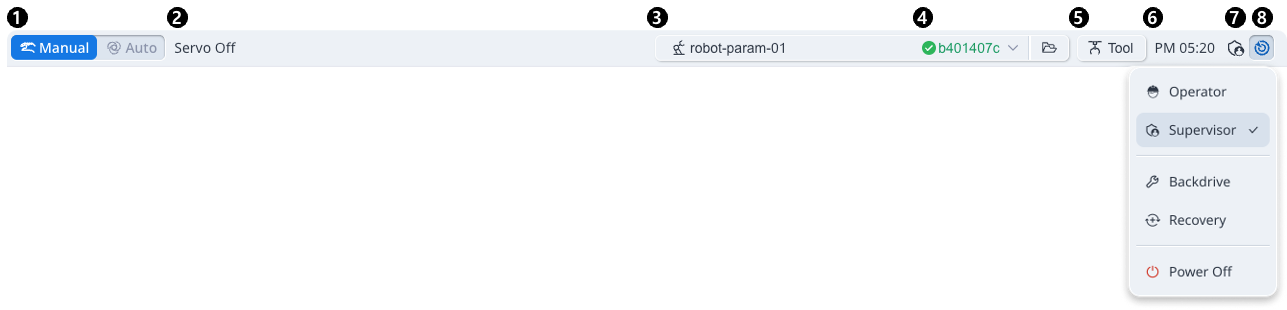
Panoramica della testata
Elementi | Descrizione | |
|---|---|---|
| 1 | Interruttore modalità robot | Questa opzione può essere modificata in Auto ↔︎ Manuale. |
| 2 | Stato robot | Vedere il link |
| 3 | File parametri robot | Visualizza il nome del file dei parametri del robot attualmente impostato. Se il valore di impostazione del file dei parametri del robot non corrisponde alle informazioni impostate nel controller, viene visualizzato come indicato di seguito. 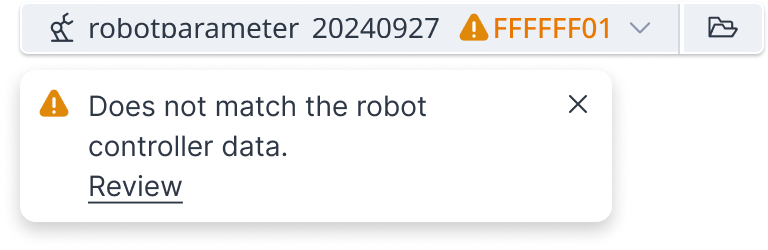 |
| 4 | Checksum sicurezza | Vengono visualizzate le informazioni checksum per i parametri del robot impostati nel controller. |
| 5 | Impostazione dell'attrezzo | Qui è possibile impostare il TCP corrente, il peso utensile e la forma utensile. 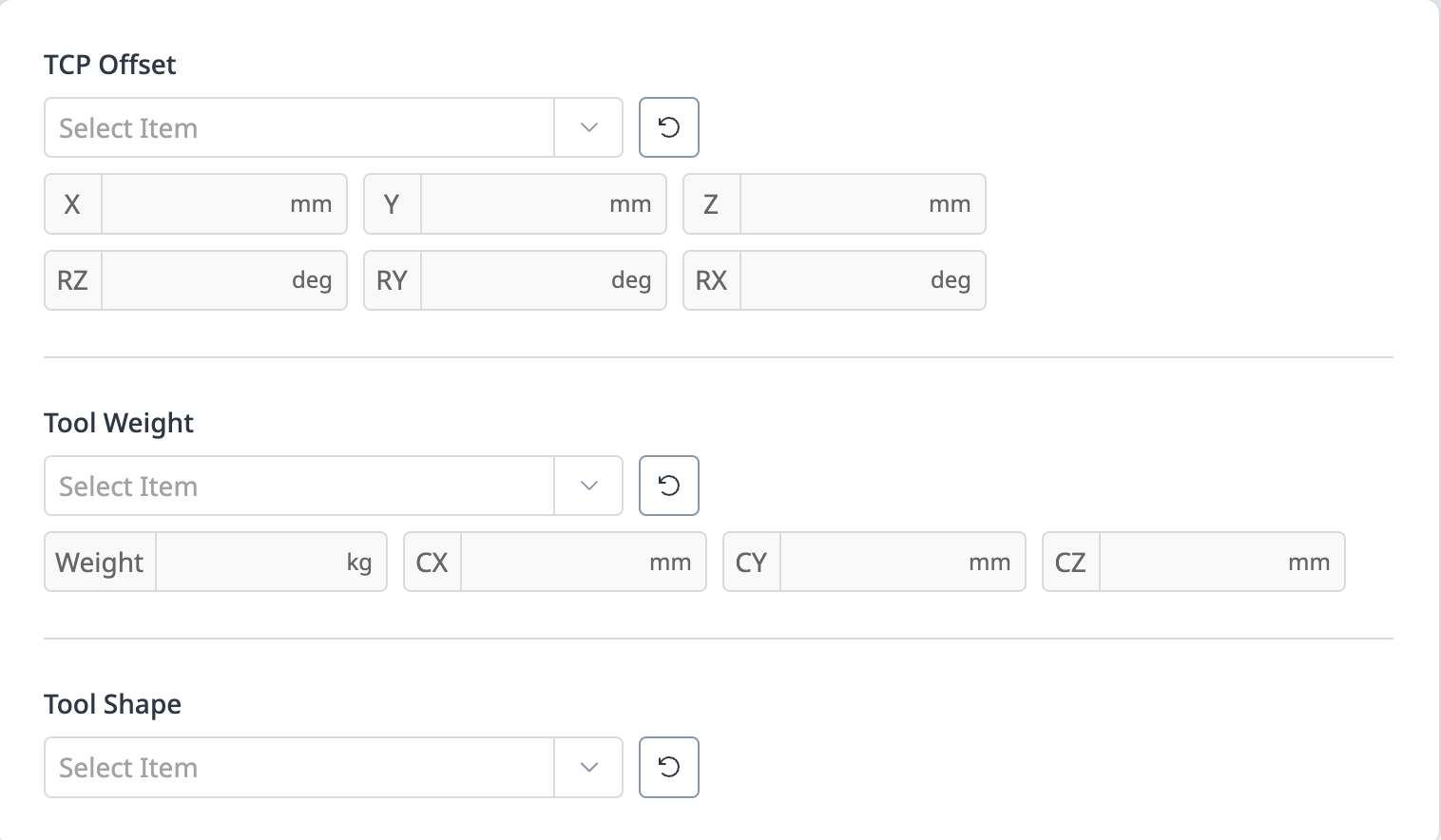 |
| 6 | Informazioni sull'ora corrente | È possibile visualizzare l'ora corrente. |
| 7 | Autorizzazione utente | Visualizza le informazioni sull'autorizzazione utente attualmente impostata (operatore/supervisore). |
| 8 | Menu | Fare clic sul MENU pulsante per visualizzare i seguenti menu:
|
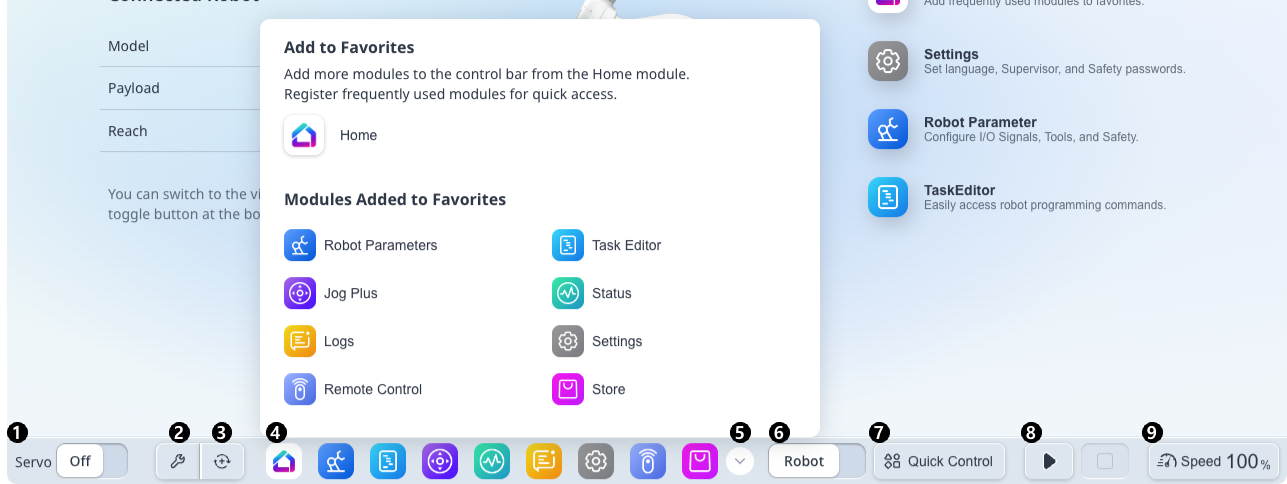
Panoramica del piè di pagina
Elementi | Descrizione | |
|---|---|---|
| 1 | Servomeccanismo | Il servomeccanismo può essere attivato o disattivato. |
| 2 | Indietro | Eseguire il modulo Backdrive. |
| 3 | Recupero | Recupero: Eseguire il modulo di ripristino. |
| 4 | Moduli preferiti | Vengono visualizzati i moduli preferiti impostati nel modulo Home. ※ Il modulo Home è sempre visualizzato. |
| 5 | Popup moduli preferiti | È possibile visualizzare tutti i moduli preferiti e modificare l'ordine di trascinamento. |
| 6 | Interruttore robot / virtuale | È possibile cambiare ↔la modalità robot ︎ virtuale. ※ Può essere utilizzato solo se il robot effettivo è collegato. |
| 7 | Controllo rapido | È possibile attivare e disattivare la finestra a comparsa che fornisce le funzioni 3D Simulator, Jog e Dashboard. |
| 8 | Controllo del programma | Fornisce pulsanti di controllo per riprodurre, mettere in pausa, riprendere e arrestare i programmi DRL/attività. |
| 9 | Controllo della velocità | Vengono visualizzate le informazioni sulla velocità corrente del robot e la finestra a comparsa di modifica della velocità consente di modificare la velocità del robot.  |