Avviamento iniziale
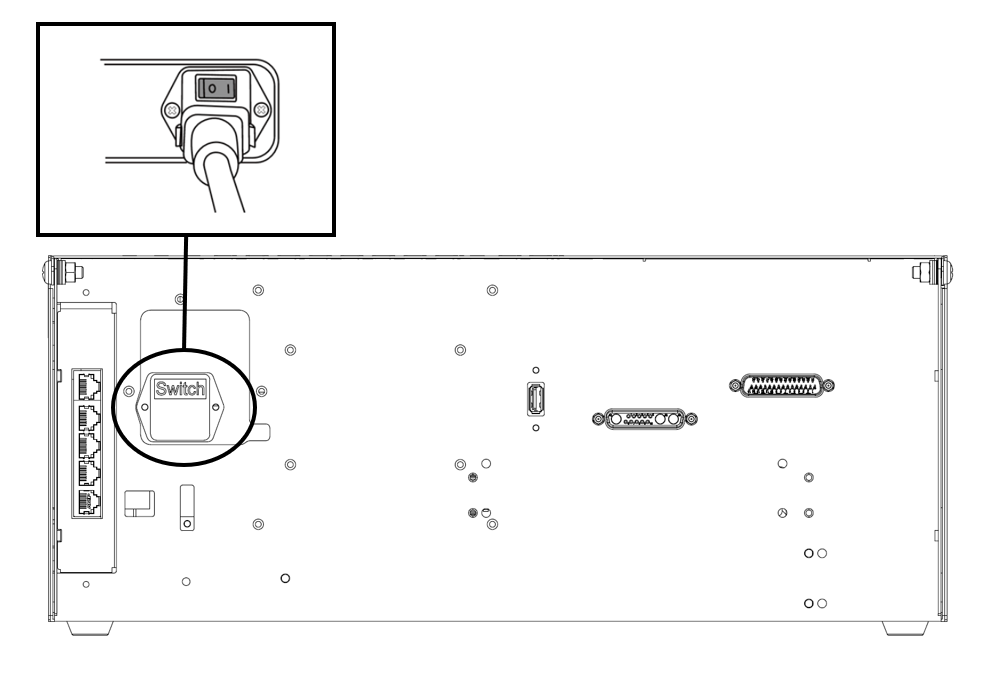
Accendere il controller
OBBLIGATORIO FACILE 1 MIN
Premere l'interruttore di alimentazione nella parte inferiore del controller. L'alimentazione per sistemi come il robot, il controller e il teach pendant è attivata.
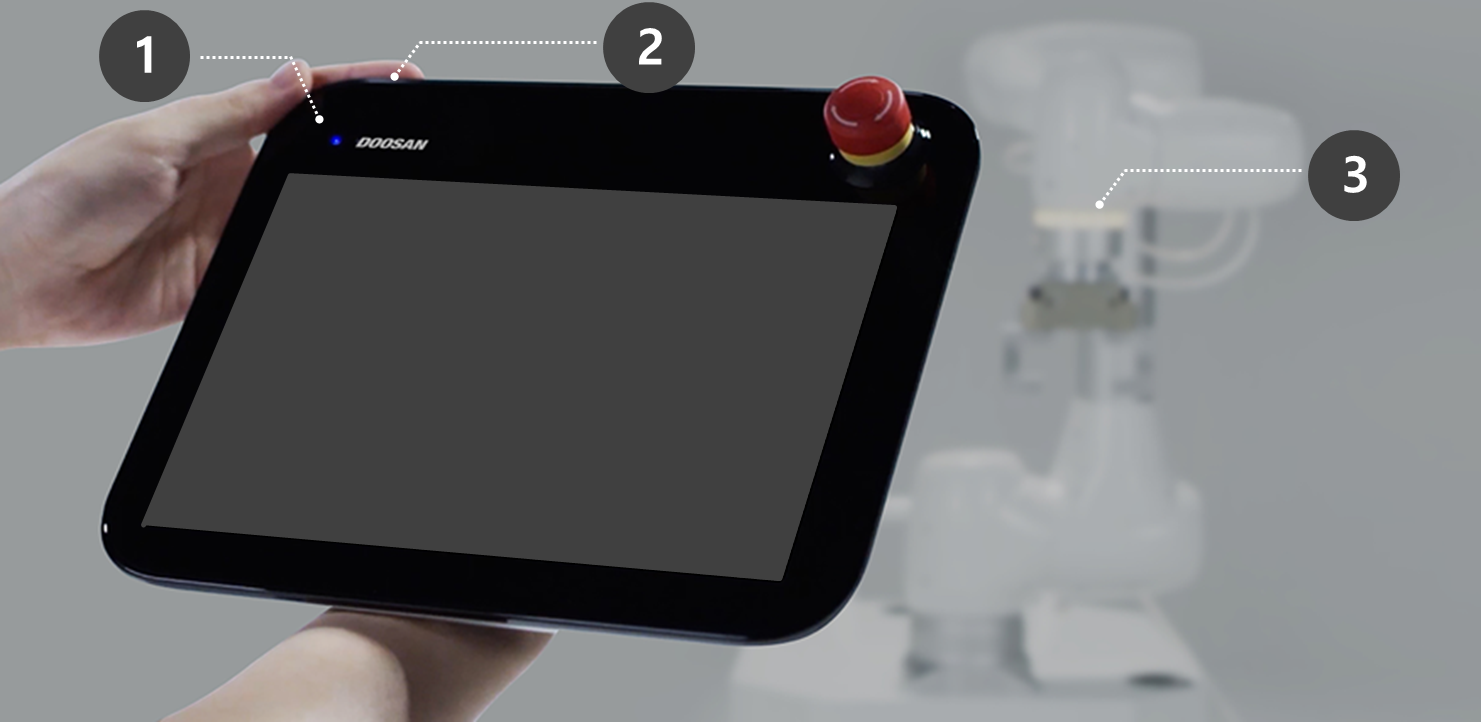
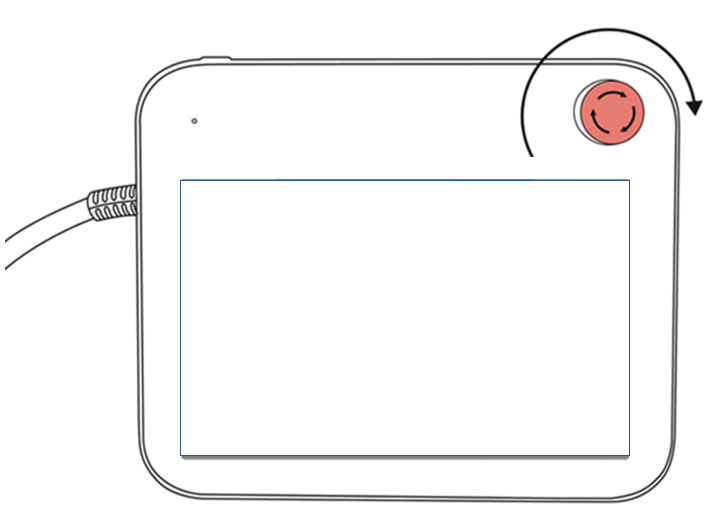
Tenere premuto il pulsante di accensione (Fig. 2) finché lo schermo del teach pendant non accende il LED del teach pendant (Fig. 1) e il LED della flangia (Fig. 3) non lampeggia in rosso finché il controller del robot non si connette alla rete.
ㅤ
ㅤ
Per ulteriori informazioni su apparecchiature diverse dal teach pendant, fare riferimento a accensione/spegnimento del sistema.
Nota
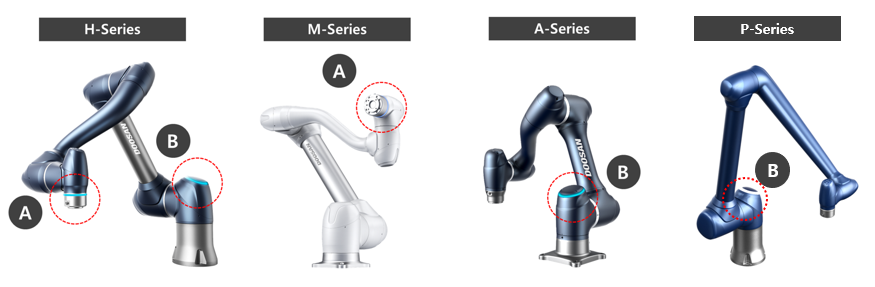
Le posizioni dei LED di ciascuna serie di robot Doosan Robotics sono le seguenti:
R: LED flangia
B: LED asse 1
Disinserire il pulsante di arresto di emergenza
OBBLIGATORIO FACILE 1 MIN
Dopo l'installazione del robot e dopo l'avvio iniziale del sistema, viene visualizzata una finestra a comparsa di avviso quando viene premuto il pulsante di arresto di emergenza del teach pendant. Il pulsante di arresto di emergenza deve essere disinserito per poter azionare il robot.
Ruotare il pulsante di arresto di emergenza in senso orario per disinserire lo stato di arresto di emergenza.
Disinserire la posa di imballaggio
OBBLIGATORIO FACILE 3 MIN
Il robot si trova nella sua posizione di imballaggio per consentire un facile trasporto o imballaggio. Per utilizzare il robot, è necessario disinserire la posa di confezionamento. Poiché il robot mantiene una posa che supera il limite dell'angolo di articolazione quando si trova nella posa di confezionamento, è impossibile impostare il servomotore sullo stato attivo a causa di una violazione del limite di sicurezza. In questo stato, il LED del robot si illumina di rosso.
Nota
Se è necessario imballare il robot a causa del trasferimento, impostare la posa della confezione utilizzando Move with packaging pose (sposta con posa di imballaggio) in modalità packaging.
Elementi | Descrizione | |
|---|---|---|
| 1 | Nome modello | Viene visualizzato il nome del modello di robot collegato. |
| 2 | Pack/Disimballare | È possibile selezionare Pack o Unpack. |
| 3 | Limite di posa/giunto di imballaggio | Vengono visualizzati i valori limite di posa e giunto. |
| 4 | Rapporto di velocità | La velocità della modalità pack o unpack può essere regolata tramite un cursore o un ingresso. |
Il processo di configurazione della posa dell'imballaggio è il seguente:
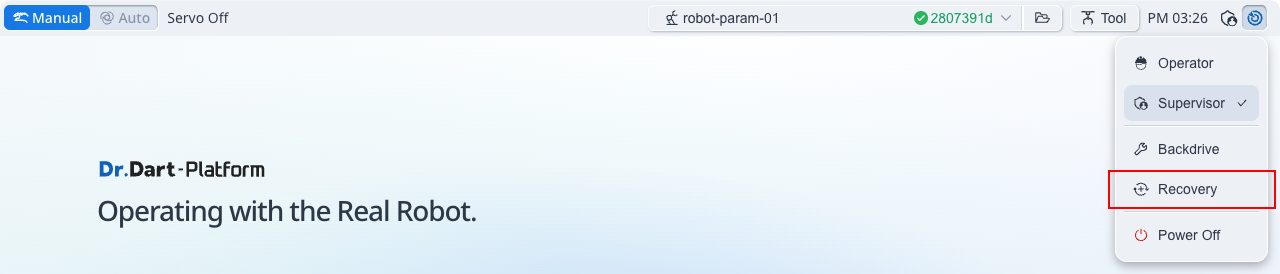
Toccare il menu Ripristino nel riquadro dell'intestazione.
Selezionare la scheda modalità imballaggio.

Toccare il pulsante Servo On to Start Recovery (attivazione servo per avviare ripristino) per attivare la modalità di imballaggio.

Il robot si sposta automaticamente sulla posa di imballaggio impostata.
Il pulsante Pack consente di portare il robot in posizione Pack e il pulsante Unpack consente di portare il robot in posizione Home predefinita.
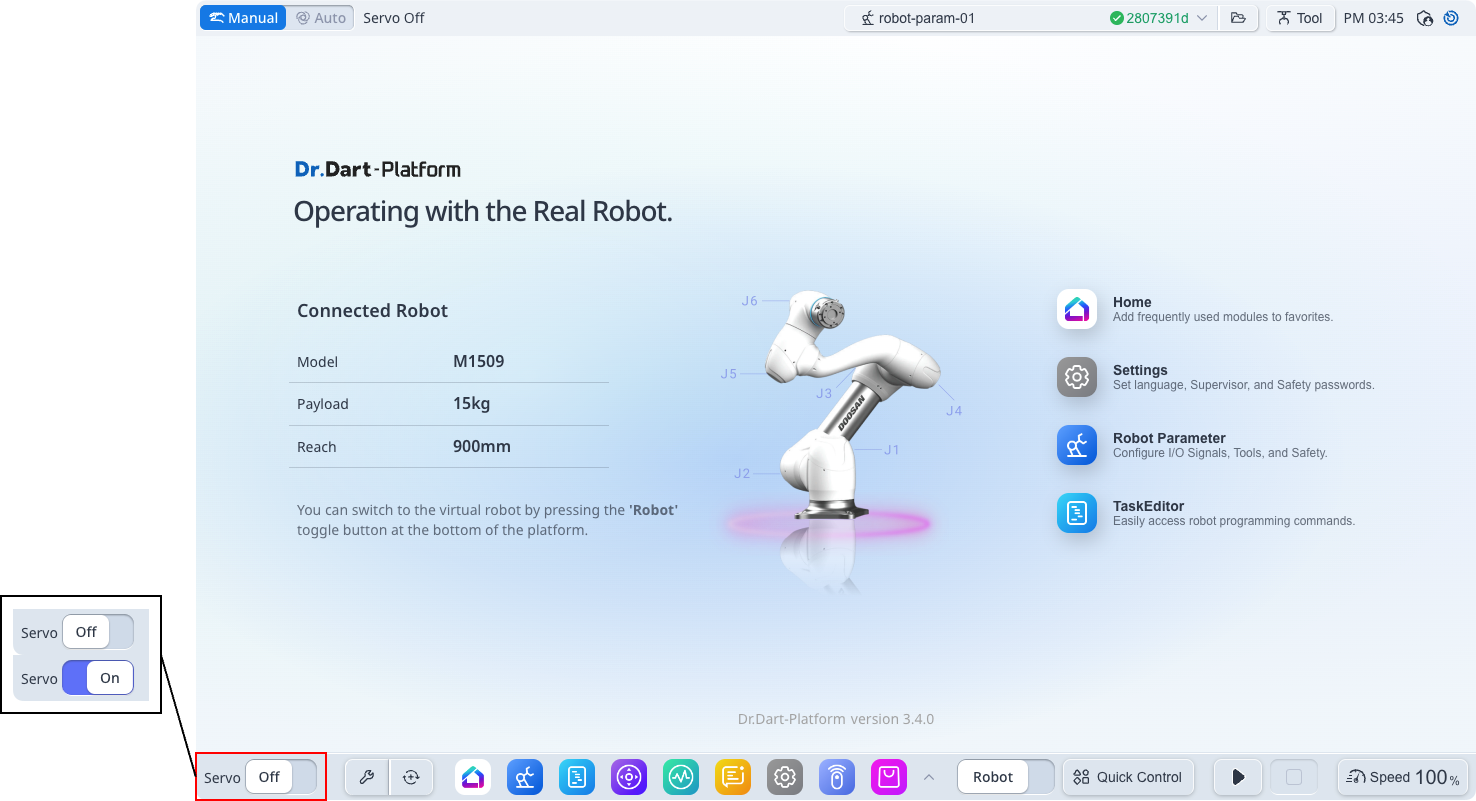
Servomeccanismo disattivato
OBBLIGATORIO FACILE 1 MIN
Lo stato servo acceso è lo stato in cui il robot è pronto con l'alimentazione fornita ai giunti del robot per modificare la posa del robot.
Premere il pulsante Servo Off per interrompere l'alimentazione fornita ai giunti del robot e arrestare il robot. Per ulteriori informazioni, fare riferimento a Panoramica del servomotore su.