
Specifiche del robot
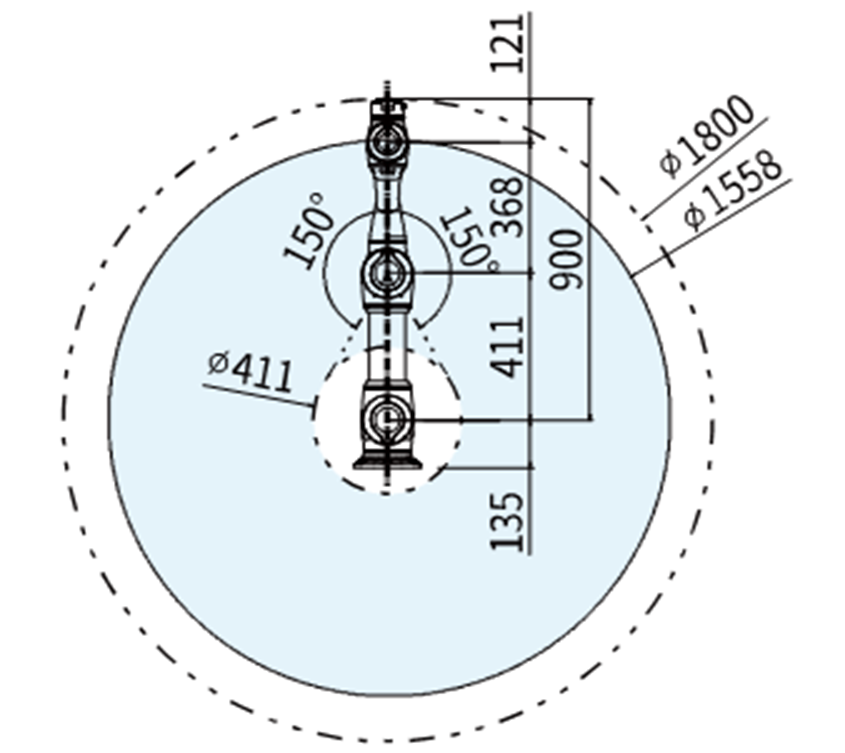
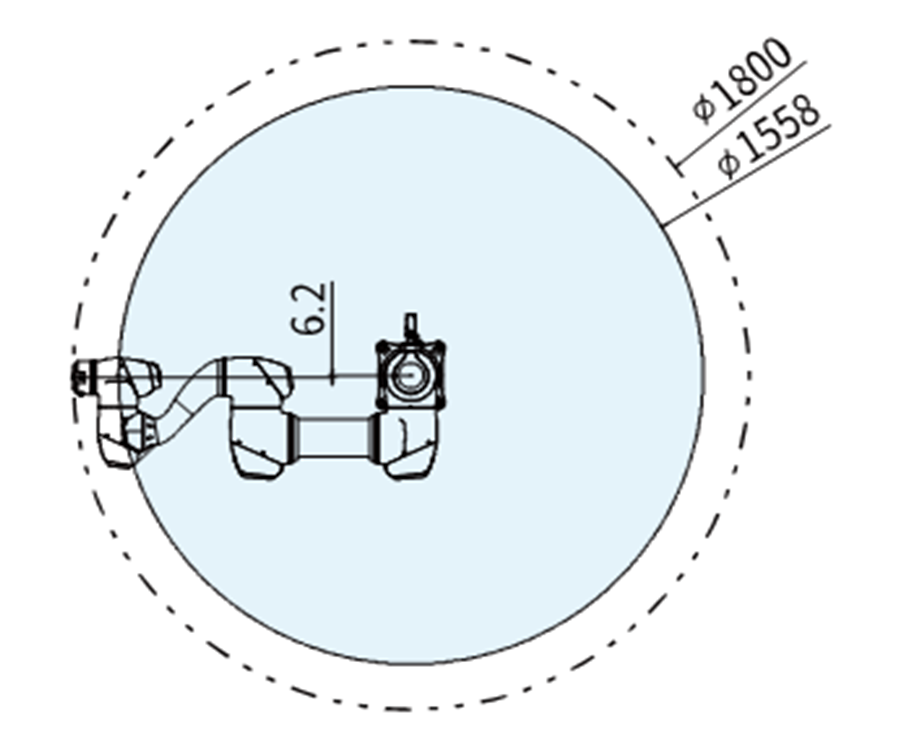
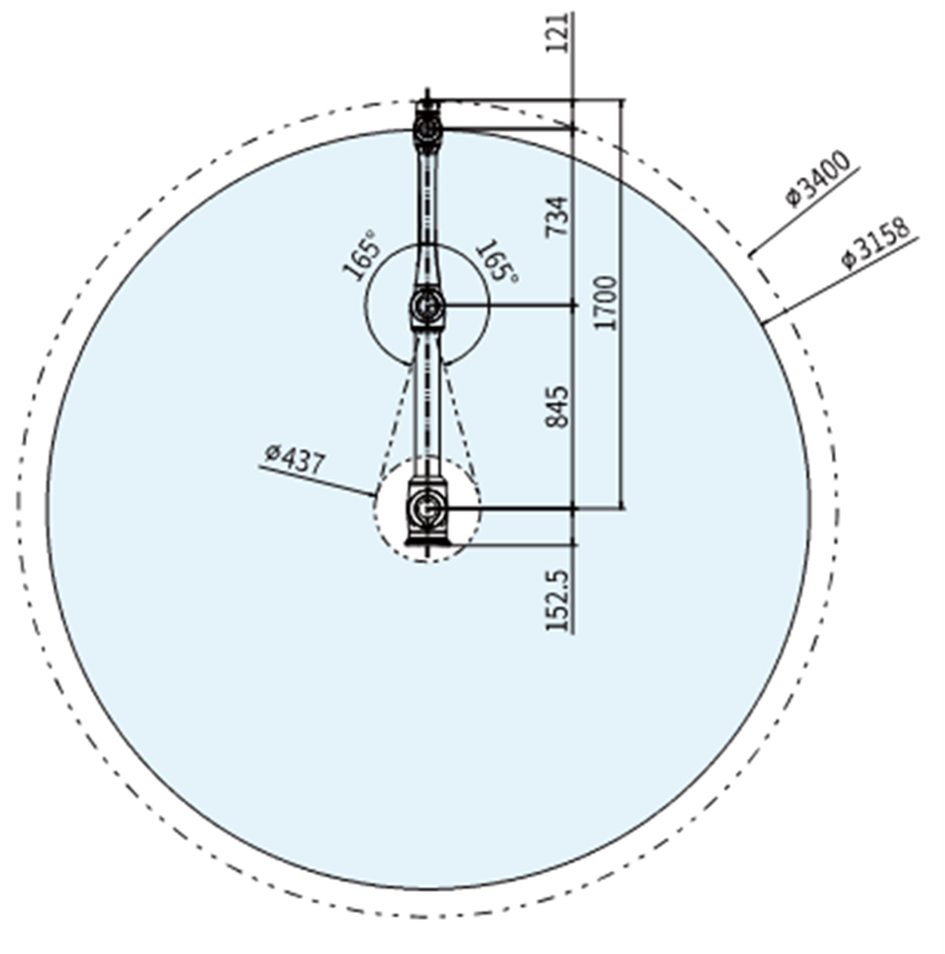
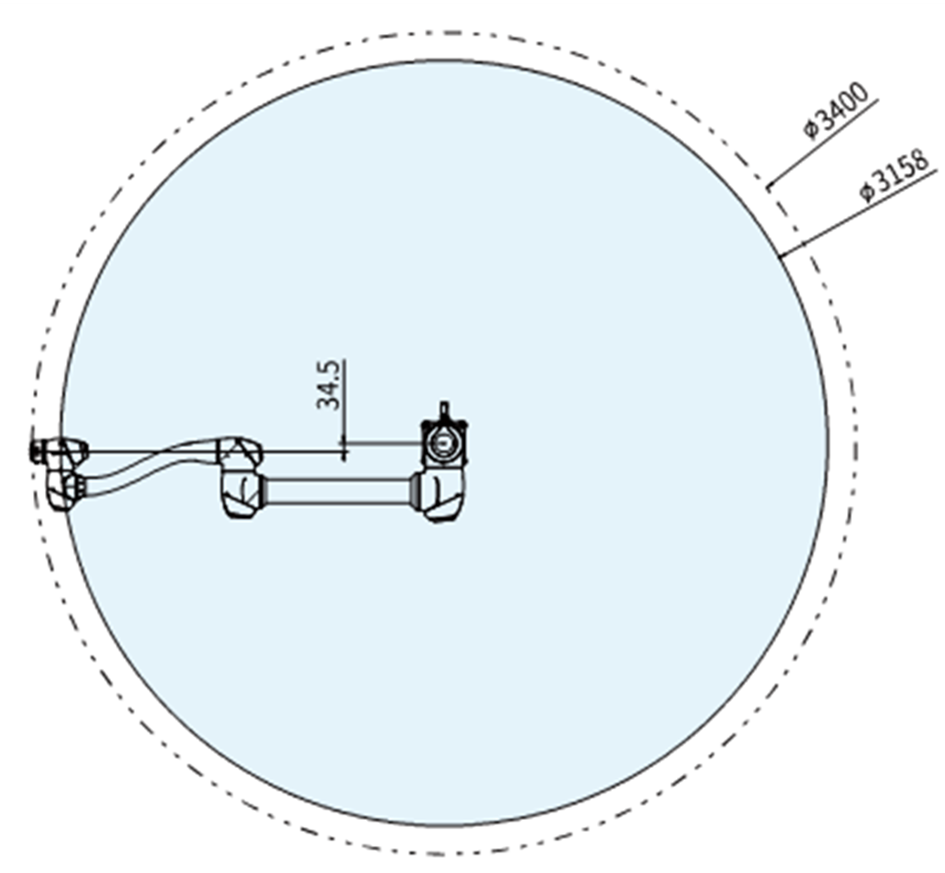
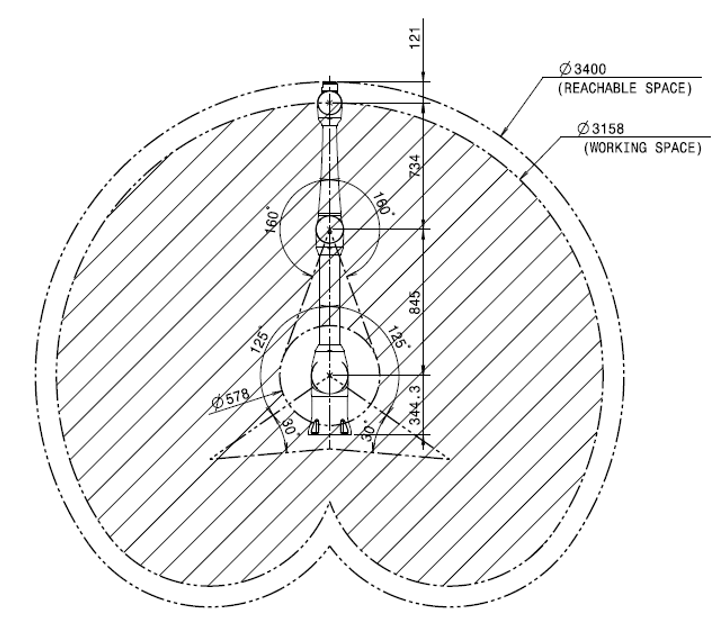
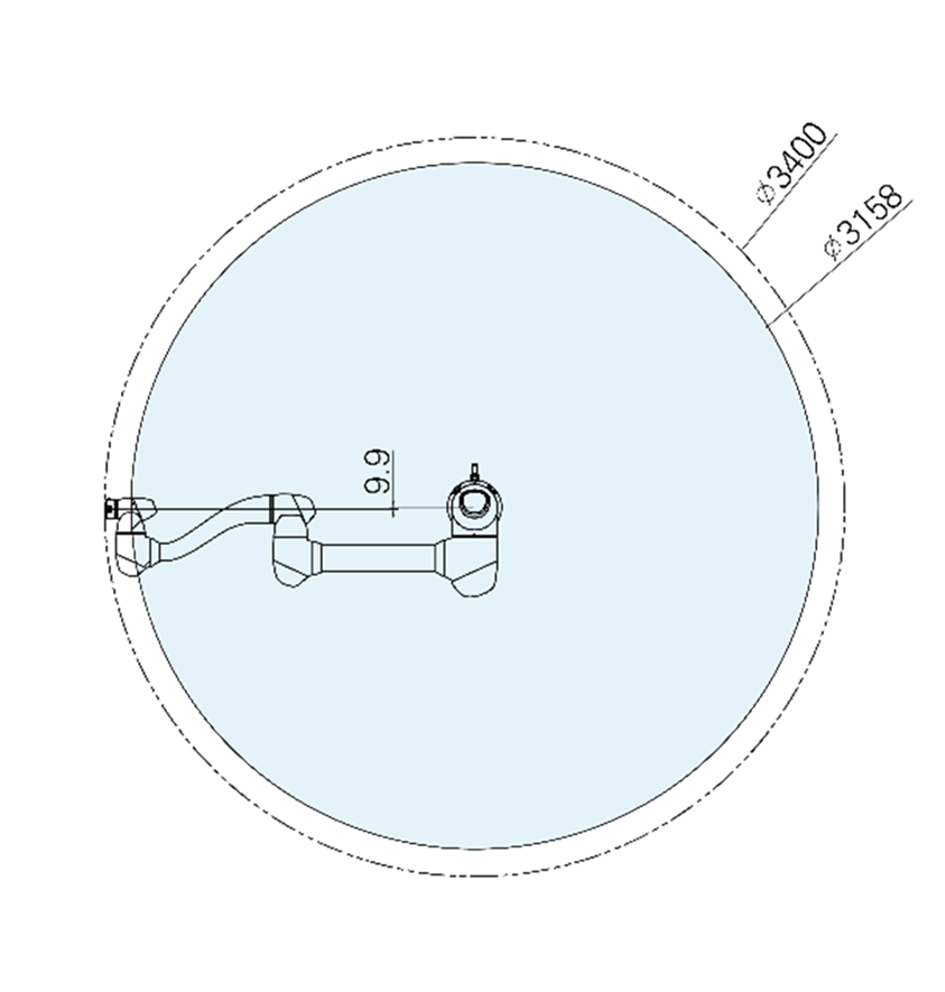
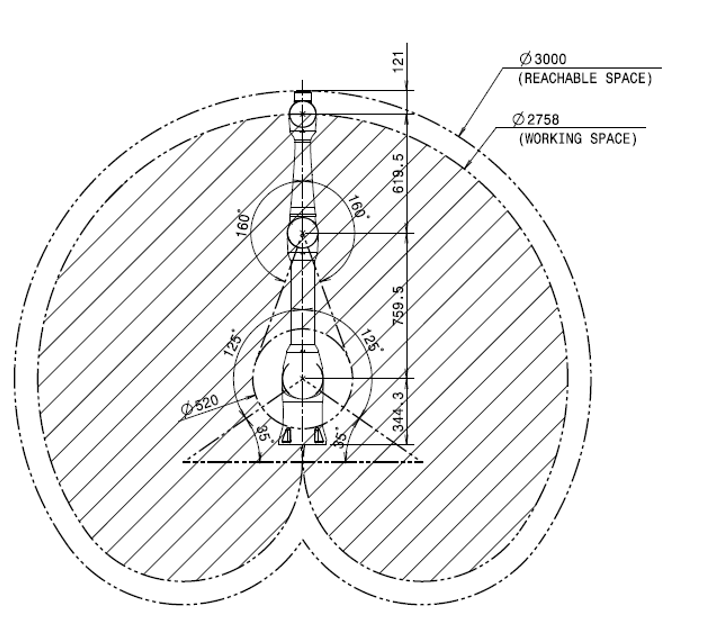
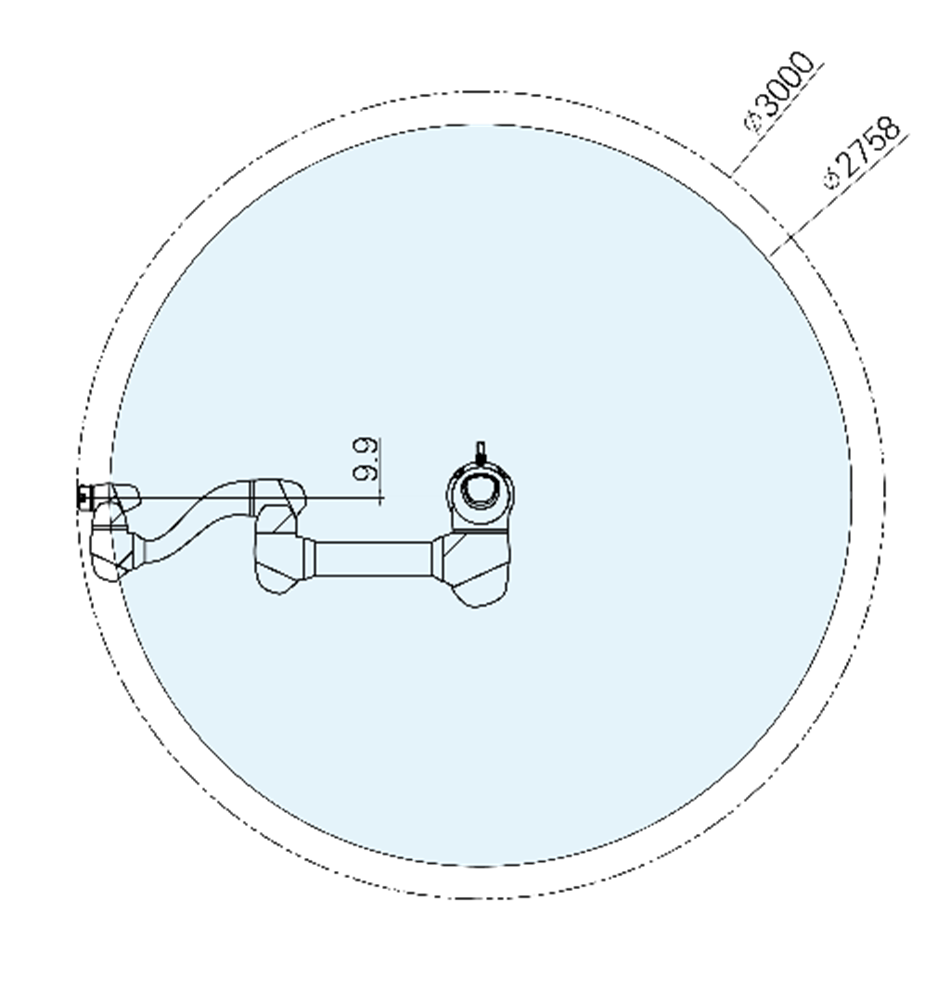
Spazio operativo del robot
M0609
 |  |
M0617
 |  |
M1013
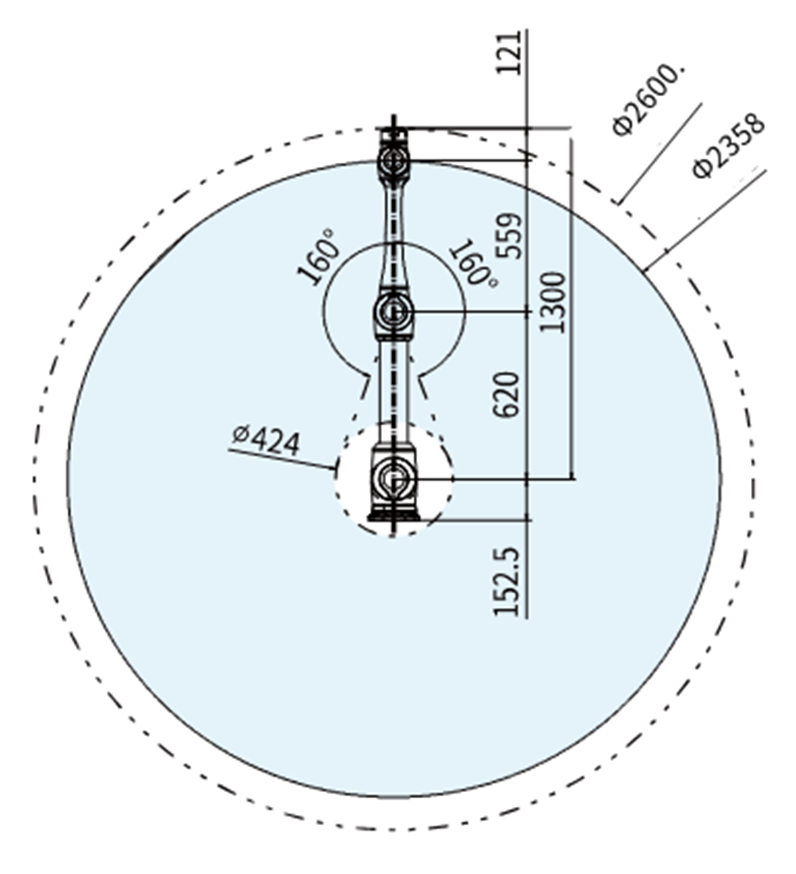 | 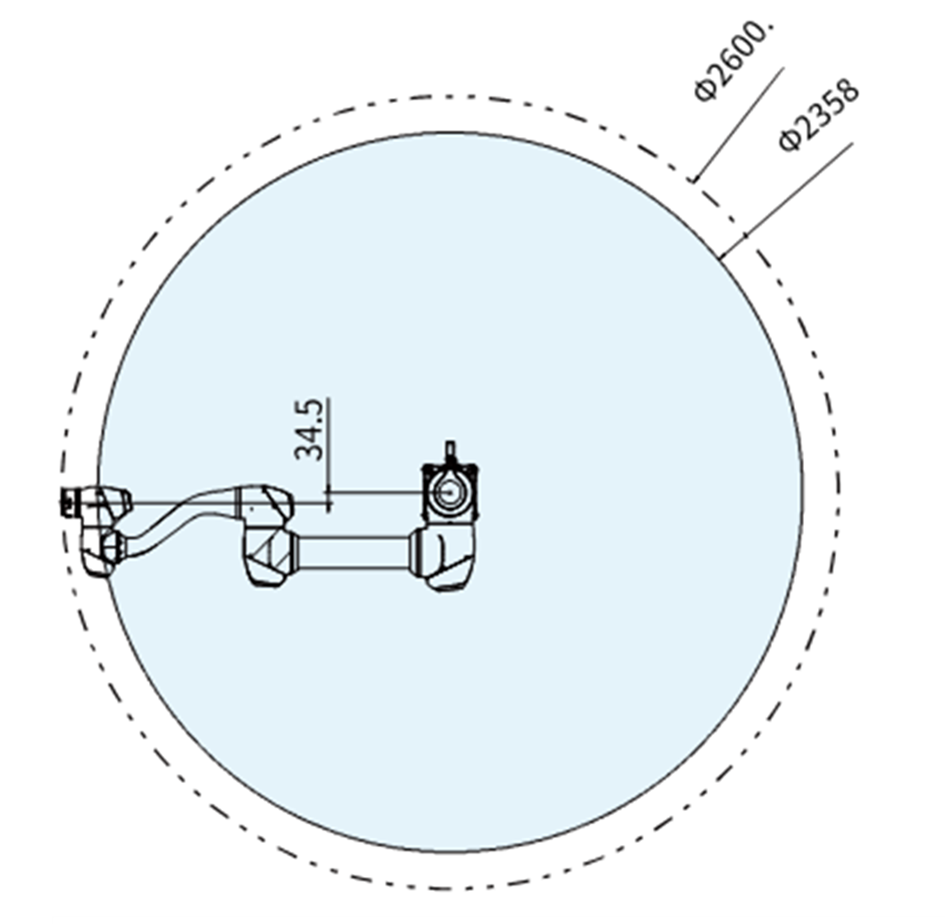 |
M1509
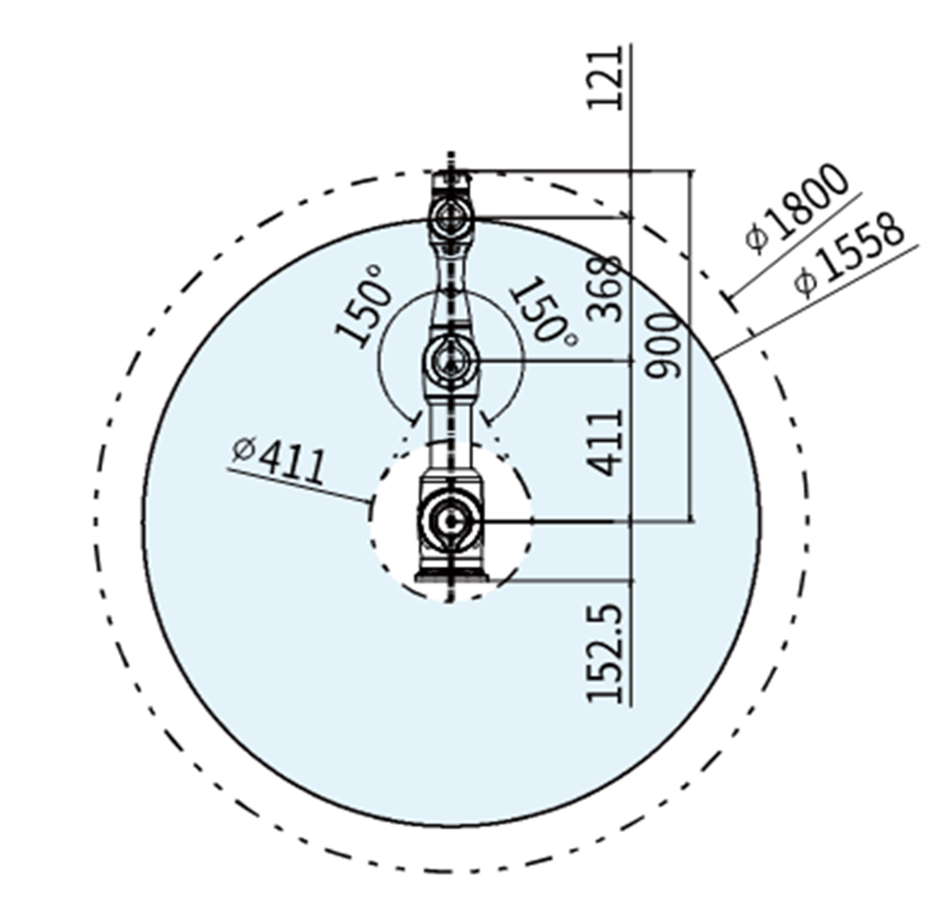 | 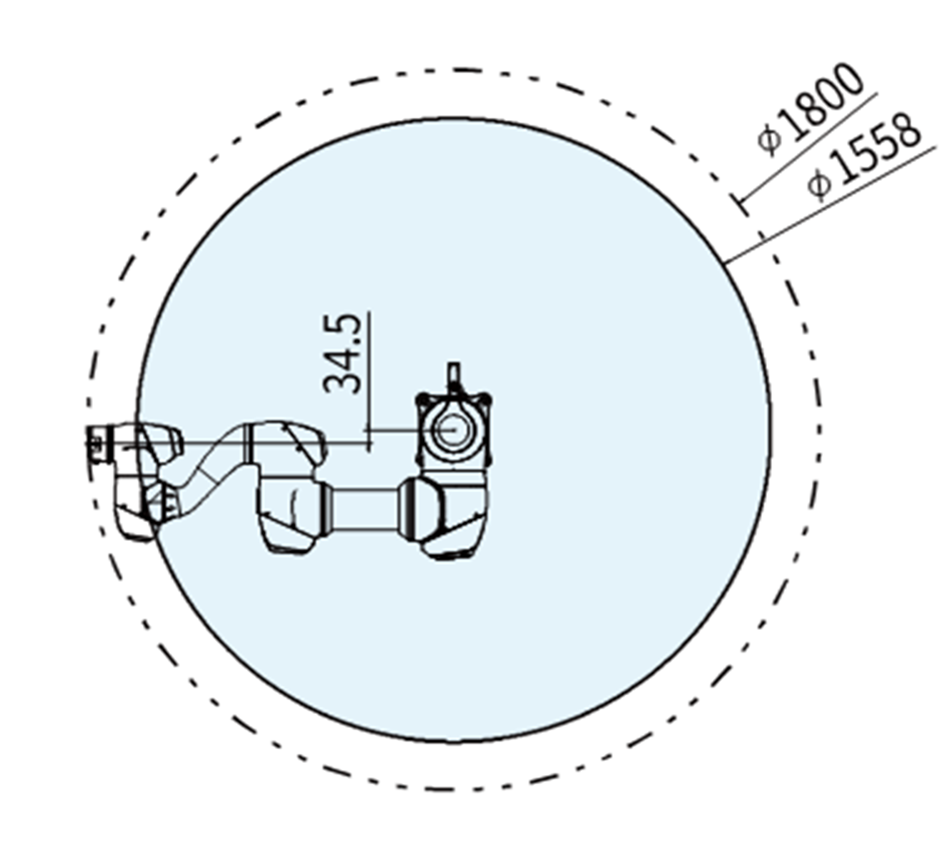 |
N. H2017
 |  |
H2515
 |  |
Max. Carico utile all'interno dello spazio operativo
Il carico utile massimo del robot all'interno del suo spazio operativo varia in base alla distanza dal baricentro. Il carico utile per distanza è il seguente:
Nota
Questo schema di carico presuppone un volume di carico ridotto dell'utensile. Gli utensili con un volume maggiore avranno maggiori limitazioni nel carico utile al di sopra del baricentro dell'utensile rispetto a un utensile con un peso uguale ma un volume inferiore, e in questi casi possono verificarsi vibrazioni.
M0609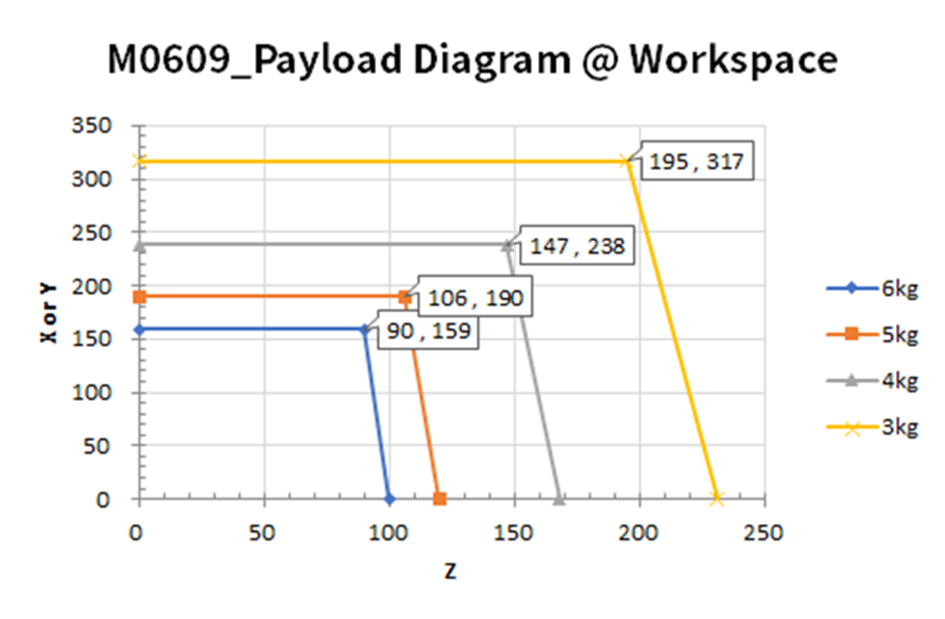 | M0609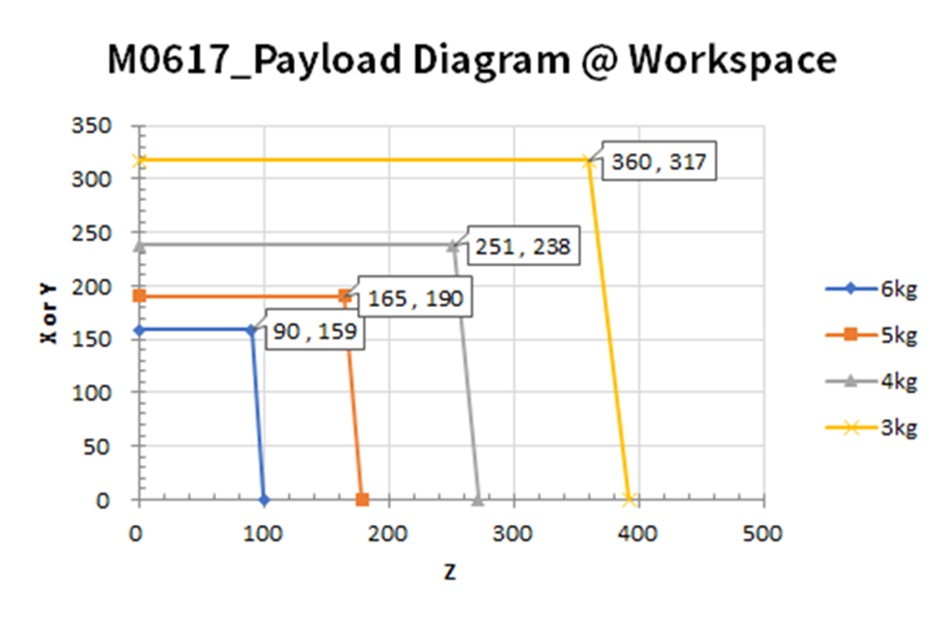 |
M1013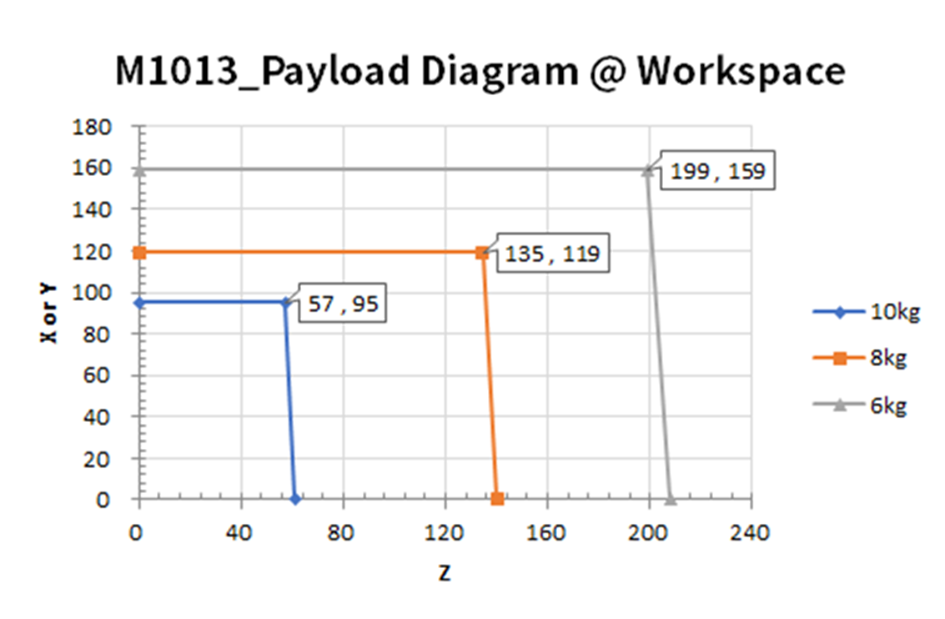 | M1509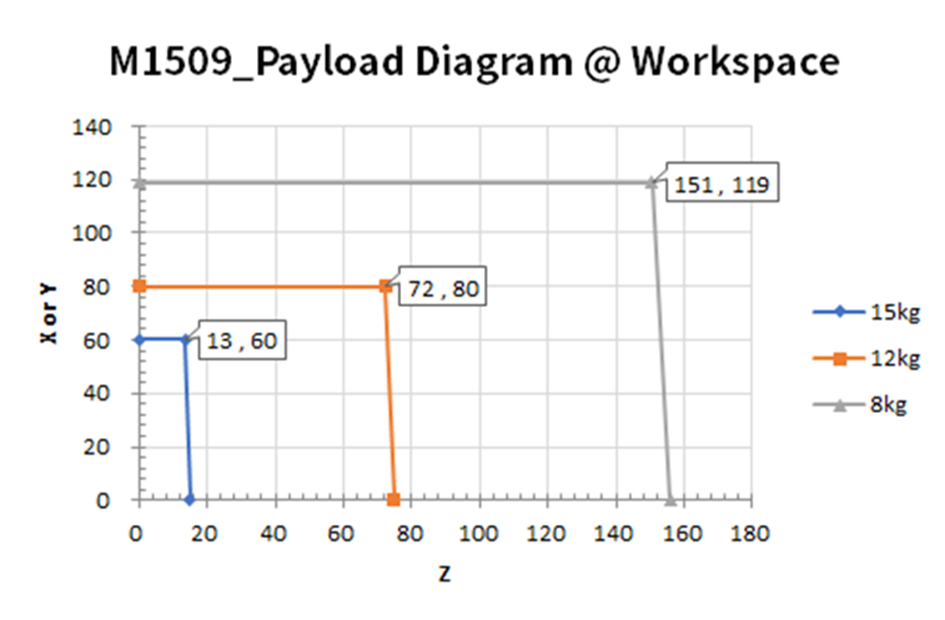 |
N. H2017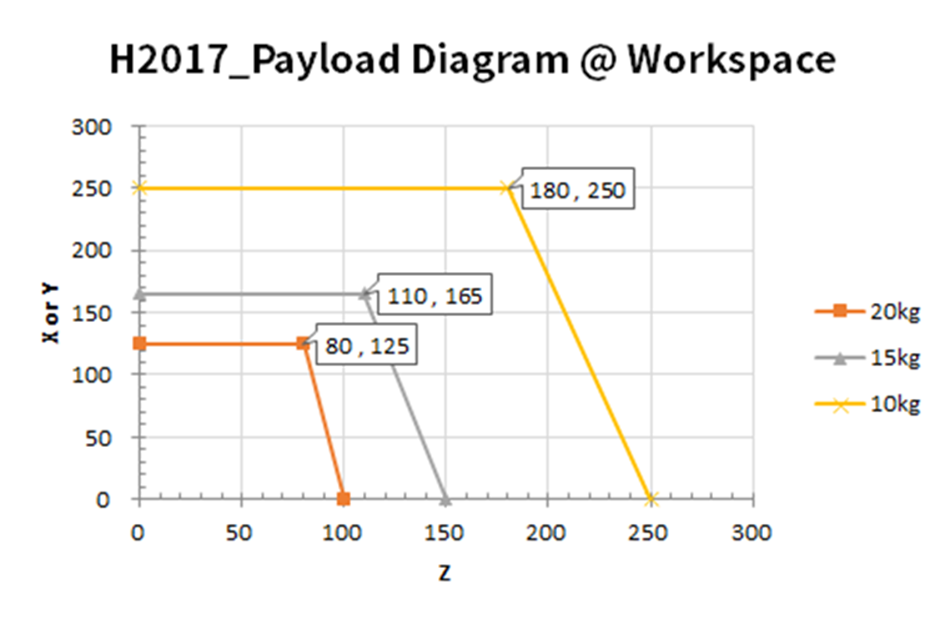 | H2515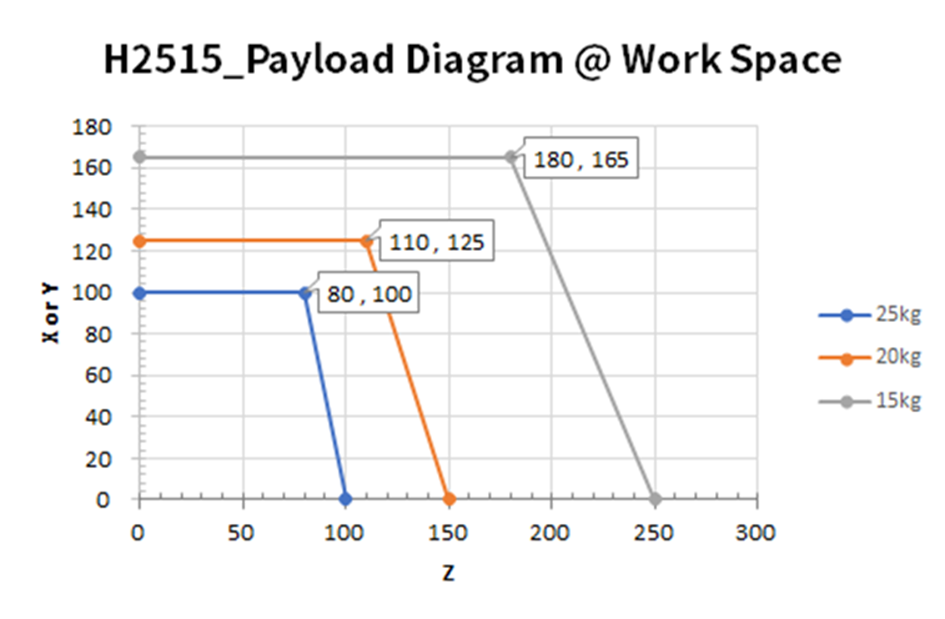 |
Momento consentito e inerzia
Il momento e l'inerzia consentiti del J4-J6 del robot sono i seguenti:
Nome modello | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Momento consentito | Inerzia | Momento consentito | Inerzia | Momento consentito | Inerzia | |
M0609 | 36 Nm | 1,6 kg㎡ | 36 Nm | 1,6 kg㎡ | 36 Nm | 1,6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
N. H2017 | 145 Nm | 8,0 kg㎡ | 81 Nm | 4,5 kg㎡ | 36 Nm | 2,0 kg㎡ |
H2515 | ||||||
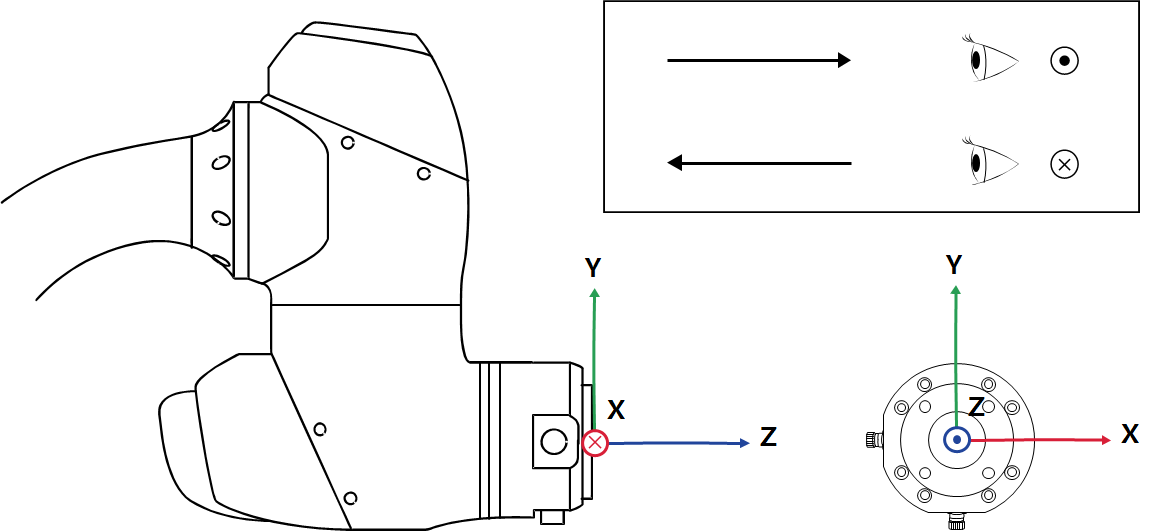
TCP (Tool Center Point)
Fare riferimento alla figura riportata di seguito per il TCP.
Specifiche di base
Nome modello | M0609 | M0617 | M1013 | M1509 | N. H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Peso | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
Carico utile entro raggio di lavoro | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
Max. Raggio di lavoro | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Numero di assi | 6 | ||||||
Max. Velocità TCP | Oltre 1 m/s. | ||||||
Ripetibilità posizione (ISO 9283) | ±0,03 mm | ±0,1 mm | ±0,05 mm | ±0,03 mm | ±0,1 mm | ||
Grado di protezione | IP 54 | ||||||
Rumore | < 65 dB | ||||||
Direzione di installazione | Qualsiasi orientamento | Solo piano | |||||
Controller e comando didattico a filo | Controller Doosan e teach pendant | ||||||
Vibrazione e accelerazione | 10≤f㎐ - 0,075 mm di ampiezza 57≤f≤150㎐ – 1G | ||||||
Impatto | Ampiezza massima: 50㎨(5G)
| ||||||
Temperatura di esercizio | 0 ℃ ~45 ℃ (da 273 K a 318 K) | ||||||
Temperatura di conservazione | -5 ℃ ~50 ℃ (da 268 K a 323 K) | ||||||
Umidità | 20% ~ 80% | ||||||
Specifiche dell'asse
Nome modello | M0609 | M0617 | M1013 | M1509 | N. H2017 | H2515 |
|---|---|---|---|---|---|---|
Angolo di funzionamento | ||||||
J1 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) | ±360° (TP:±360°) |
Max. Velocità per asse (funzionamento con carico utile nominale) | ||||||
J1 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 100 °/s | 100 °/s |
J2 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 80 °/s | 80 °/s |
J3 | 180 °/s | 150 °/s | 180 °/s | 180 °/s | 100 °/s | 100 °/s |
J4 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J5 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J6 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |